Материал: Вимірювальні перетворювачі
Вимірювальні перетворювачі
1. Загальні відомості. Класифікація
Керувачі (КП) - пристрої, призначені для порівняння інформації, що надходить від задавачів (З) з інформацією про стан привода, що передає по ланцюгу зворотного зв’язку (ЗЗ).
Технічне виконання К залежить від виду З. Якщо
вихідний вал СП слідкує за зміною напруги, що надходить з аналогової ЕОМ,
програмного, оптичного або радіолокаційного пристрою, то в якості К
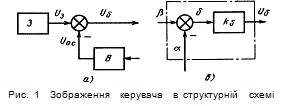
застосовують сумуючий каскад на вході підсилювача. На структурній схемі такий К
зображують так, як показано на рис. 1, а. В якості перетворювача В в ланцюгу ЗЗ
в позиційному СП використовують потенціометр, у швидкісному - тахогенератор
(див. Рис. 1).
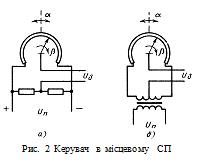
У місцевому СП в якості К застосовують один датчик (індукційний, потенціометричний), корпус якого пов’язаний з задаючим валом, а ротор або відповідно бігунець (повзун) - з валом виконавчого двигуна. Схема підключення потенціометра постійного струму зображена на рис. 2, а. Для використання потенціометра на змінному струмі (рис. 2, б) можна застосувати трансформатор з середньою точкою.
Якщо в якості З служить вхідний сигнал, розташований на значній відстані від виконавчого валу, то К будують на основі дистанційної потенціометричної або індукційної передачі, що складається з ідентичних датчиків, електрично ввімкнених по мостовій або трансформаторній вимірювальній схемі. На структурній схемі такий К зображають так, як показано на рис. 1, б. Такі пристрої частіше називають вимірювачами розузгодження (ВР). Як видно з рис. 1, б, ВР порівнює кути повороту і перетворює одержану різницю в електричний сигнал.
Основними характеристиками і параметрами ВР є наступні:
статична характеристика ![]() , що
представляє собою залежність вихідного сигналу від помилки розузгодження;
, що
представляє собою залежність вихідного сигналу від помилки розузгодження;
коефіцієнт перетворення (чутливість)
![]() ;
;
похибки вимірювального пристрою;
потужність вихідного сигналу.
До основних вимог, що пред’являються до ВР, відносяться:
висока точність вимірювання та перетворення кута розузгодження;
лінійність і велика крутизна статичної характеристики;
мала потужність споживання електричної енергії;
безінертність;
надійність;
мінімальні розміри і маса.
Особливо жорсткі вимоги пред’являють до чутливості і точності вимірювання,
оскільки точність СП не може бути вище точності пристрою,
що вимірює і перетворює сигнал розузгодження.
Основним показником точності вимірювання є похибка вимірювання,
тобто відхилення результату вимірювання від істинного значення величини,
що вимірюється.
Похибки вимірювання поділяють по способу виразу на абсолютні і відносні,
а за джерелом виникнення
- на інструментальні,
допущені при виготовленні власне вимірювачів,
і методичні,
що виникають внаслідок недосконалості вимірювальної схеми або неузгодження опорів.
. Механічний диференціал
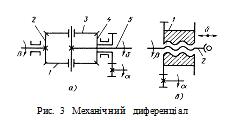
В СП з механічним зворотнім зв’язком в якості ПУ знаходять застосування механічні диференціали (МД). По конструкції
МД поділяють на конічний шестеренний
(рис. 3, а) і гвинтовий (рис. 3, б).
Як видно на рис.
3, а,
конічний МД складається з двох незалежних приводних конічних зубчастих коліс
2 і
4, зв’язаних відповідно з задавального та виконавчою осями СП,
і двох сателітів
1, 3, жорстко з’єднаних хрестовиною,
вісь
5 котрої вільно проходить через втулку колеса
4 і є вихідною віссю пристрою.
При
обертанні коліс 2 і 4 в протилежні боки з однаковими швидкостями сателіти і
зв’язана з ними вісь 5 будуть нерухомі. При зупинці або випередженні одного з
коліс на вихідній осі виділяється різниця кутів повороту ![]() , що є кутом
розузгодження.
, що є кутом
розузгодження.
У гвинтовому МД (рис. 3, б), що складається з гайки 1 і гвинта 2, при наявності розузгодження гвинт переміщується відносно закріпленої в горизонтальному напрямку гайки вправо або вліво в залежності від знаку розузгодження.
Конструкція МД повинна повністю виключати можливість безпосередньої передачі енергії і реактивних крутних моментів з боку вихідної ланки на вхід МД.
Перевагами МД є висока надійність і
наявність обертального і поступального видів руху вихідного елемента. Проте МД
властиві всі недоліки механічних редукторів: тертя, низька зносостійкість і
обмежений ресурс роботи, низька точність, зумовлена зазорами і технологічні
похибки виготовлення зубчастих коліс і недосконалістю складання (неспівпадання
осей обертання з геометричними осями, відхилення від перпендикулярності). Крім
того, з допомогою МД не можна здійснювати дистанційну передачу, оскільки для
його роботи необхідна безпосередня близькість задавальної і виконавчої осей
приводу. Тому основне застосування МД знаходять в гідравлічних пристроях для
створення внутрішніх зворотних зв’язків, наприклад в гідроприводі з об’ємним
регулюванням або електрогідравлічним підсилювачем. В решти випадках застосування
МД вимагається додатковий пристрій для перетворення механічного сигналу в
електричний.
.Вимірювачі розузгодження на
потенціометрах
Потенціометричні схеми призначені
для вимірювання лінійного або кутового розузгодження з перетворенням на постійному
або змінному струмі. З цією метою використовують потенціометри однообертові з
обмеженим (в межах ![]() ) і
необмеженим кутами повороту, а також багато обертові.
) і
необмеженим кутами повороту, а також багато обертові.
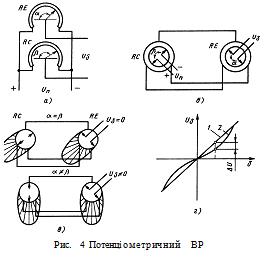
Для дистанційного управління
використовують два потенціометри, кінематично зв’язаних з задавального і
виконавчою осями СП. Потенціометри електрично можуть бути ввімкнені по мостовій
(рис. 4 а) або трьохпровідній (рис. 4, б) вимірювальній схемі. При узгодженому
положенні задавальної та виконавчої осей (![]() ) міст, утворений передаючими
) міст, утворений передаючими ![]() і
приймаючими
і
приймаючими ![]() потенціометрами,
зрівноважений, і вихідна напруга
потенціометрами,
зрівноважений, і вихідна напруга ![]() , що знімається з вимірювальної
діагоналі мосту (зі щіток), дорівнює нулю. При переміщенні щітки потенціометра
, що знімається з вимірювальної
діагоналі мосту (зі щіток), дорівнює нулю. При переміщенні щітки потенціометра ![]() на кут
на кут ![]() , а щітки
потенціометра
, а щітки
потенціометра ![]() на кут
на кут ![]() , де
, де ![]() - кут
розузгодження (похибка), міст виходить з рівноваги, і на виході схеми
з’являється сигнал, пропорційний значенню розузгодження.
- кут
розузгодження (похибка), міст виходить з рівноваги, і на виході схеми
з’являється сигнал, пропорційний значенню розузгодження.
Для СП застосовують датчики кута повороту типу ПД, ПП, який відрізняється від ПД наявністю кінцевих вимикачів, ПТП, а також прецизійні ПЛ1-1, ПЛ1-2. технічні дані деяких потенціометрів приведені в табл.1. Для розширення діапазону роботи СП застосовують кругові потенціометри типу ПК (двохщіткові) або ПК3 (трищіткові) з необмеженим обертанням (движка) і трьома або чотирма відводами.
Три провідна вимірювальна схема на
потенціометрах з живленням через зв’язані з задавальною віссю СП рухомі
контакти потенціометра-датчика ![]() показана на рис. 4, б. Завдяки
рівномірності намотки потенціометра діаграма розподілу потенціалів по секціях
потенціометра
показана на рис. 4, б. Завдяки
рівномірності намотки потенціометра діаграма розподілу потенціалів по секціях
потенціометра ![]() симетрична
(рис. 4, в), а положення максимуму потенціалу відповідає плюсу джерела
живлення, якщо за точку з потенціалом, що дорівнює нулю, прийнято мінус джерела
живлення. Три провідна схема забезпечує аналогічний розподіл потенціалів і на
потенціометрі
симетрична
(рис. 4, в), а положення максимуму потенціалу відповідає плюсу джерела
живлення, якщо за точку з потенціалом, що дорівнює нулю, прийнято мінус джерела
живлення. Три провідна схема забезпечує аналогічний розподіл потенціалів і на
потенціометрі ![]() . Очевидно,
що напруга
. Очевидно,
що напруга ![]() , яка
знімається зі щіток
, яка
знімається зі щіток ![]() , буде
дорівнювати нулю тільки в тому випадку, якщо щітки потенціометрів знаходяться в
рівно потенціальних точках. Як видно з вказаних діаграм, ця умова виконується
при взаємно перпендикулярному положенні щіток потенціометрів
, буде
дорівнювати нулю тільки в тому випадку, якщо щітки потенціометрів знаходяться в
рівно потенціальних точках. Як видно з вказаних діаграм, ця умова виконується
при взаємно перпендикулярному положенні щіток потенціометрів ![]() і
і ![]() . Це
положення, що є положенням узгодження потенціометрів, досягається при на
лаштуванні схеми розворотом щіток потенціометра
. Це
положення, що є положенням узгодження потенціометрів, досягається при на
лаштуванні схеми розворотом щіток потенціометра ![]() на кут
на кут ![]() по
відношенню до щіток потенціометра
по
відношенню до щіток потенціометра ![]() . При відсутності розузгодження
щітки потенціометрів
. При відсутності розузгодження
щітки потенціометрів ![]() і
і ![]() перпендикулярні,
і
перпендикулярні,
і ![]() . При
повороті задавальної осі (при появі сигналу розузгодження) механічне
переміщення щіток
. При
повороті задавальної осі (при появі сигналу розузгодження) механічне
переміщення щіток ![]() викликає
обертання обох потенціальних діаграм. Нерухомі щітки
викликає
обертання обох потенціальних діаграм. Нерухомі щітки ![]() опиняться в
точках з різними потенціалами і з них знімається напруга сигналу розузгодження.
опиняться в
точках з різними потенціалами і з них знімається напруга сигналу розузгодження.
При навантаженнях, що значно перевищують
опір потенціометрів, розглянуті вище схеми ВР забезпечують лінійну залежність
вихідної напруги - сигналу розузгодження:
![]() .
.
Статична характеристика ![]() в цьому
випадку (режим холостого ходу) є прямолінійною (рис. 4, г). Коефіцієнт
перетворення, що визначається відношенням напруги розузгодження
в цьому
випадку (режим холостого ходу) є прямолінійною (рис. 4, г). Коефіцієнт
перетворення, що визначається відношенням напруги розузгодження
до кута розузгодження ![]() , залежить
від підведеної до схеми напруги живлення
, залежить
від підведеної до схеми напруги живлення ![]() і робочого діапазону потенціометрів
і робочого діапазону потенціометрів
![]() . Для
нормального функціонування схеми необхідно, щоб робочі діапазони передаючого
. Для
нормального функціонування схеми необхідно, щоб робочі діапазони передаючого ![]() і
приймаючого
і
приймаючого ![]() потенціометрів
дорівнювали
потенціометрів
дорівнювали ![]() .
.
Похибки потенціометричних ВР залежать від багатьох причин і їх розділяють на статичні і динамічні похибки.
Статична похибка складається з
методичної та інструментальної складових. Методична похибка з’являється при
умові, що опір навантаження ![]() співрозмірний з опором
потенціометрів і робить шунтуючу дію. Для схеми, що представлена на рис. 4, а,
вихідна напруга в цьому випадку визначається співвідношенням
співрозмірний з опором
потенціометрів і робить шунтуючу дію. Для схеми, що представлена на рис. 4, а,
вихідна напруга в цьому випадку визначається співвідношенням
де ![]() - кутове
положення щітки потенціометру
- кутове
положення щітки потенціометру ![]() ;
;
![]() - коефіцієнт
навантаження,
- коефіцієнт
навантаження, ![]() ;
;
![]() - максимальний опір
потенціометрів.
- максимальний опір
потенціометрів.
Статична характеристика (крива ![]() на рис. 4,
г) носить нелінійний характер. Похибка від неузгодженого опору і навантаження
на рис. 4,
г) носить нелінійний характер. Похибка від неузгодженого опору і навантаження ![]() зростає зі
зменшенням
зростає зі
зменшенням ![]() .
.
Методичну похибку можна зменшити вмиканням на виході ВР елементу з високим вхідним опором (емітерного повторювача або повторювача напруги).
Статична інструментальна похибка обумовлена виробничими допусками і конструктивними факторами:
зазорами;
нерівномірністю намотки;
ступінчастістю характеристики;
зоною нечутвливості.
По інструментальній похибці назначаються класи точності потенціометрів (табл. 2). Для одержання необхідних характеристик в якості датчика і приймача необхідна вибирати потенціометри одного класу точності.
Динамічна похибка проявляється у
вигляді шумів, що виникають за рахунок миттєвого порушення контактів при
переході (движка) з витка на виток і при більших швидкостях відпрацювання управляючої
дії.
. Індукційні вимірювачі
розузгодження
В якості ВР змінного струму широкого
застосування набули пристрої трансформаторної синхронної передачі на
електричних індукційних мікро машинах типу сельсинів і обертових
трансформаторів (ОТ).
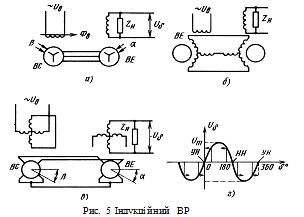
ВР на сельсинах (рис. 5, а)
складається з двох сельсинів: сельсина-датчика ![]() і сельсина-приймача
і сельсина-приймача ![]() . До джерела
живлення змінного струму підключена тільки обмотка збудження сельсина-датчика.
Сельсин-приймач збуджується змінним магнітним потоком
. До джерела
живлення змінного струму підключена тільки обмотка збудження сельсина-датчика.
Сельсин-приймач збуджується змінним магнітним потоком ![]() , що
створюється фазними напругами сельсина-датчика, які передаються
сельсину-приймачу по трипровідному ланцюгу синхронізації. Однофазна обмотка
сельсина-приймача служить для виробітку сигналу розузгодження. Умовно-графічні
зображення схеми на безконтактних сельсинах у відповідності з ГОСТ 2.722-68
дано на рис. 5, б.
, що
створюється фазними напругами сельсина-датчика, які передаються
сельсину-приймачу по трипровідному ланцюгу синхронізації. Однофазна обмотка
сельсина-приймача служить для виробітку сигналу розузгодження. Умовно-графічні
зображення схеми на безконтактних сельсинах у відповідності з ГОСТ 2.722-68
дано на рис. 5, б.
В момент узгодження, що
характеризується взаємно перпендикулярним розташуванням осей однофазних обмоток
сельсинів, сумарний магнітний потік приймача перпендикулярний до осі вихідної
обмотки сельсина приймача і напруга розузгодження де Застосування обертових
трансформаторів (ОТ) в якості формувачів сигналу управління зумовлено
підвищенням вимог до точності СП, оскільки схеми на ОТ забезпечують точніше
перетворення кута розузгодження. Найчастіше вимірювання виконують з допомогою
двох ОТ ( де Сельсини і ОТ випускаються в
контактному і безконтактному виконанні, корпусні і безкорпусні, з різними
напругами збудження і на різні частоти. Підвищення частоти живлення дозволяє
зменшити розміни датчиків.
Вихідні напруги ВР на сельсинах і ОТ
є неперервною функцією кута розузгодження При розузгодженнях, менших З трьох розглянутих положень
узгодження СП тільки положення Приводи, в яких в якості вимірювача
розузгодження використовуються мікро машини, володіють властивістю
самосинхронізації в межах Замінюючи у виразах (1), (2) ![]() . При
наявності рзузгодження механічний поворот ротора сельсина датчика
перетворюється в поворот магнітного потоку сельсина приймача. Цей потік
пронизує однофазну управляючу обмотку, з якої знімається напруга, що
характеризує відхилення сельсинів від положення узгодження:
. При
наявності рзузгодження механічний поворот ротора сельсина датчика
перетворюється в поворот магнітного потоку сельсина приймача. Цей потік
пронизує однофазну управляючу обмотку, з якої знімається напруга, що
характеризує відхилення сельсинів від положення узгодження:
![]() ,(1)
,(1)
![]() - максимальна
напруга синхронізації.
- максимальна
напруга синхронізації.
![]() і
і ![]() ),
ввімкнених по трансформаторній схемі (рис. 5, в) і працюючих аналогічно ВР на
сельсинах. Схема на ОТ виробляє напругу розузгодження
),
ввімкнених по трансформаторній схемі (рис. 5, в) і працюючих аналогічно ВР на
сельсинах. Схема на ОТ виробляє напругу розузгодження
![]() ,(2)
,(2)
![]() - напруга
живлення;
- напруга
живлення;
![]() - коефіцієнт
трансформації між обмоткою збудження і вторинною обмоткою.
- коефіцієнт
трансформації між обмоткою збудження і вторинною обмоткою.
![]() і містять інформацію, необхідну для
управління СП. Статистична характеристика індукційного ВР, побудована згідно
(2) та (2), носить нелінійний характер (рис. 5, г). Це перечить загальним
вимогам до лінійності характеристик вимірювальних пристрої і приводить до появи
таких недоліків, як непостійність крутизни характеристикики та зміни фази
вихідної напруги не тільки при зміні полярності, але і в залежності від
значення сигналу розузгодження. Як витікає з рис. 5, г, зміна фази, а разом з
нею і напрямок відпрацювання ВД проходить в точках
і містять інформацію, необхідну для
управління СП. Статистична характеристика індукційного ВР, побудована згідно
(2) та (2), носить нелінійний характер (рис. 5, г). Це перечить загальним
вимогам до лінійності характеристик вимірювальних пристрої і приводить до появи
таких недоліків, як непостійність крутизни характеристикики та зміни фази
вихідної напруги не тільки при зміні полярності, але і в залежності від
значення сигналу розузгодження. Як витікає з рис. 5, г, зміна фази, а разом з
нею і напрямок відпрацювання ВД проходить в точках ![]() ,
, ![]() і
і ![]() , що
характеризуються нульовими значеннями вихідної напруги.
, що
характеризуються нульовими значеннями вихідної напруги.
![]() , напрямок
відпрацювання ВД (на рис. 5, г показано стрілками) сприяє усуненню
розузгодження, і привод автоматично приходить в положення стійкої рівноваги при
, напрямок
відпрацювання ВД (на рис. 5, г показано стрілками) сприяє усуненню
розузгодження, і привод автоматично приходить в положення стійкої рівноваги при
![]() . При
розузгодженні
. При
розузгодженні ![]() напрямок
відпрацювання залежить від коливання напруги в системі: при незначному
збільшенні напруги ВД відпрацьовує сигнал розузгодження до
напрямок
відпрацювання залежить від коливання напруги в системі: при незначному
збільшенні напруги ВД відпрацьовує сигнал розузгодження до ![]() , а у
випадку зменшення напруги - до
, а у
випадку зменшення напруги - до ![]() . Це визначає положення нестійкої
рівноваги системи, тобто точка
. Це визначає положення нестійкої
рівноваги системи, тобто точка ![]() характеризується як нестійкість
нуль
характеризується як нестійкість
нуль ![]() . При
розузгодженнях, що перевищують
. При
розузгодженнях, що перевищують ![]() , напрямок відпрацювання ВД таке, що
привід буде прагнути до стійкого нуля
, напрямок відпрацювання ВД таке, що
привід буде прагнути до стійкого нуля ![]() , яки є кут
, яки є кут ![]() . В принципі
це буде теж положення
. В принципі
це буде теж положення ![]() , але досягається
вно розворотом всього приводу на
, але досягається
вно розворотом всього приводу на ![]() , що недопустимо з точки зору
початкової виставки приладу, замотування джутів і т.д.
, що недопустимо з точки зору
початкової виставки приладу, замотування джутів і т.д.
![]() є точкою стійкої рівноваги та
істинним нулем привода.
є точкою стійкої рівноваги та
істинним нулем привода.
![]() . Відмітимо,
що наявність в системі таких великих розузгоджень виключається самим режимом
роботи СП. Вони можливі тільки в моменти ввімкнення приводу, в режимі
перекидання або у випадку, коли переміщення вихідного валу відбувається при
вимкненому живленні. Нормальний режим роботи СП можна обмежити робочою зоною
. Відмітимо,
що наявність в системі таких великих розузгоджень виключається самим режимом
роботи СП. Вони можливі тільки в моменти ввімкнення приводу, в режимі
перекидання або у випадку, коли переміщення вихідного валу відбувається при
вимкненому живленні. Нормальний режим роботи СП можна обмежити робочою зоною ![]() , в межах
якої характеристика лінійна, володіє найбільшою крутизною і допустима заміна
, в межах
якої характеристика лінійна, володіє найбільшою крутизною і допустима заміна ![]() .
.
![]() , одержимо
, одержимо