Материал: Система электропривода рабочего механизма
Система электропривода рабочего механизма
Задание на курсовое проектирование (КП) Вариант
I - 1
Разработать и рассчитать разомкнутую систему
электропривода рабочего механизма (подъем стрелы карьерного гусеничного
экскаватора). Предусмотреть возможность запуска двигателей постоянного тока
(ДПТ) под нагрузкой P1 в несколько ступеней и остановку электрическим
торможением. Вид торможения динамический. Момент инерции рабочего механизма,
приведенный к валу двигателя, принять равным 2JДВ.
Содержание
1. Выбор двигателя и определение каталожных данных
. Описание работы механизма и привода подъема стрелы ЭКГ-4,6А
. Расчет естественных электромеханических f(Iя) и механических f(м) характеристик
. Расчет сопротивлений пусковых реостатов
. Расчет режимов торможения (динамический)
. Расчет и построение графиков переходного процесса ДПТ с независимым возбуждением
. Проверка двигателя по нагреву
. Расчет потребления электроэнергии за цикл работы электродвигателя
Выводы
Литература
1. Выбор двигателя и определение каталожных
данных
Тип механизма, карьерный гусеничный экскаватор ЭКГ-4,6А, приводной электродвигатель и его паспортные данные определяем по прил. 5.
Необходимыми для расчета являются следующие параметры двигателя:
ПВ = 75%
Рн = 175 кВтн = 460 Вн = 410 Ан = 740 об/минпред = 1500 об/мин
р = 46 число пазов
с принудительной вентиляцией
число витков в катушке на полюс 14= 0,0128 Омдп = 0,0088 Ом
Момент инерции якоря GД2 = 1,9
ДПЭ-82 ЭКГ-4,6А 75 175 740 460 410 0,0122 0,0088
1,8
. Описание работы механизма экскаватора ЭКГ-4,6А
Экскаватор ЭКГ-4,6А (обозначение расшифровывается: Э - экскаватор, К - карьерный, Г - гусеничный, 4,6 - емкость ковша в м3 и А - буквенный индекс, обозначающий модификацию модели) является землеройной машиной, предназначенной для разработки и погрузки в транспортные средства твердых грунтов, разрыхленных взрыванием, на открытых работах по добыче полезных ископаемых и строительных материалов, а также на строительстве крупных гидротехнических и промышленных сооружений.
Экскаватор ЭКГ-4.6А (рис. 1) имеет следующие основные части: ходовую тележку 3, поворотную платформу 2 с механизмами и силовым оборудованием, рабочее оборудование 1. Рабочие и габаритные размеры экскаватора ЭКГ-4.6А приведены на рис. 2.
Ходовая тележка (рис. 3) является опорной базой экскаватора, на которой размещается поворотная платформа со всеми механизмами и рабочим оборудованием, и служит для передвижения машины. Она состоит из нижней рамы 5, зубчатого венца 4, роликового опорного круга 3, ходового механизма 2, гусеничного хода / и гидравлической системы управления 6.
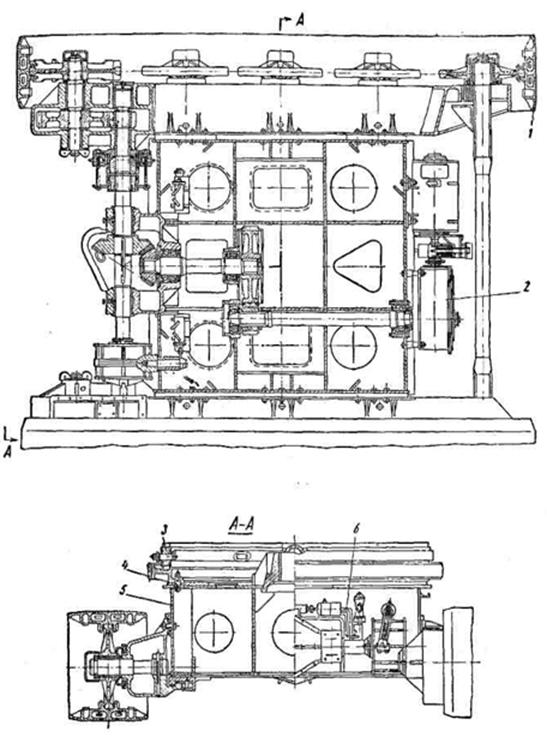
Рис. 3. Ходовая тележка экскаватора ЭКГ-4.6А
Поворотная платформа предназначена для размещения основных механизмов, электрического привода, узлов рабочего оборудования, кабины управления, а также вспомогательной аппаратуры.
Поворотная платформа составляет поворотную часть
экскаватора, которая может вращаться на 360°. Вследствие этого экскаватор
называется полноповоротным.
Рис. 4. Рабочее оборудование экскаватора
ЭКГ-4.6А
Копание грунта производится ковшом при помощи напорного механизма, а подъем ковша производится подъемной лебедкой.
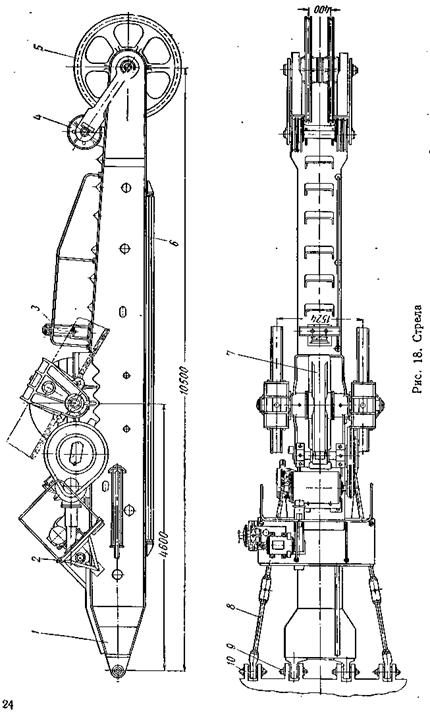
Стрела имеет сварную конструкцию прямоугольного сечения служит для установки маханизма напора, рукояти с ковшом и механизма открывания днища ковша. Нижним концом стрела установлена на поворотной платформе, а за верхний конец подвешена при помощи канатного полиспаста к двуногой стойке.
Напорный механизм имеет электродвигатель, который через цилиндрические зубчатые колеса вращает напорный вал с кремальерными шестернями, находящимися в зацеплении с рейками, приваренными к рукояти, и заставляет последнюю двигаться вперед или назад. Тормоз напора установлен на втором конце вала электродвигателя.
Механизм открывания днища ковша приводится также от электродвигателя и имеет барабан с канатом, посредством которого через систему рычагов выдергивается засов днища ковша и происходит его открывание.
Главные механизмы экскаватора приводятся в движение от электродвигателей постоянного тока серии ДП по системе управления генератор-двигатель с силовыми магнитными усилителями.
Стрела (рис. 5) состоит из корпуса 1 коробчатого сечения сварной конструкции из листовой стали 09Г2С, напорного механизма 7, направляющих роликов 3, установки головных блоков 5 и блоков 4 подвески стрелы. Для обслуживания механизмов стрелы предусмотрена площадка 2. С нижней стороны, для защиты стрелы от случайных ударов рукоятью установлены два деревянных амортизатора б, закрытых швеллерами. Стрела литыми пятами опирается в специальные гнезда в передней балке поворотной платформы и при помощи канатной подвески за блоки 4 устанавливается под углом 45° к горизонту. Для предохранения от выскакивания пят из гнезд служат валики 9, установленные с зазором в отверстиях пят и проушин передней балки. В горизонтальной плоскости стрела удерживается тягами 8, закрепленными головками в кронштейнах стрелы, и валиками 10 в проушинах передней балки.
Напорный механизм служит для создания движения рукояти вперед и назад. Кинематическая схема напорного механизма приведена на рис. 6. Электродвигатель 1 приводит в движение напорный механизм через зубчатую передачу 2-3. Зубчатое колесо 3 соединено с промежуточной вал-шестерней 6 посредством фрикционной предохранительной муфты 4. Вал-шестерня 6 передает вращение зубчатому колесу 7, закрепленному на напорном валу, на концах которого установлены две кремальерные шестерни 9, находящиеся в зацеплении с зубчатыми рейками 8 рукояти. Для торможения напорного механизма служит тормоз 5, смонтированный на втором конце электродвигателя 1.
Лебедка для подъема стрелы (рис. 6, а) также приводится в движение подъемным двигателем. На конце вала двигателя установлена звездочка 16, передающая движение при помощи цепи 17 звездочке 18, посаженной на вал 19 червяка.
От червяка 20 движение передается червячному колесу 21, сидящему на одной оси 22 с барабаном лебедки 23. Червячное колесо и барабан установлены на оси на подшипниках скольжения и соединены при помощи специального кулачкового устройства. Червячная передача заключена в масляную ванну 24, корпус которой прикреплен к поворотной платформе в специальном вырезе. На валу червяка помещается тормозной шкив 25, постоянно зажатый при помощи пружины 26, обхватывающей его тормозной лентой 27. В качестве упорного подшипника червяка применен шарикоподшипник 38.
Смазка задней втулки червячного вала производится при помощи пресс-масленки 39, передней втулки - 40, задней втулки барабана и червячного колеса - массленки 41 и передней втулки барабана - масленки 42.
Во время работы подъемной лебедки отключают лебедку для подъема стрелы, для чего разъединяют цепь 17 и снимают ее со звездочки 16. Для предотвращения случайного включения подъемной лебедки при неснятой цепи имеется специальный блокирующий механизм 28, который состоит из стойки 29 (рис. 4.11, б) с закрепленными на ней рычагом 33 и конечным выключателем 30 с рычагом 31: последний имеет на конце ролик 32. К ролику прикреплены выктючающая рейка 34 и рычаг 35 с возвратной пружиной 36.
Конечный выктючатель сблокирован с золотником вктюченнй цилиндра тормоза подъемной лебедки: нижний конец выключающей рейки 34 входит в отверстие направляющей планки 37.
Для подъема стрелы рычаг 33 поднимается вверх пружиной 36 и рейка 34 отводит ролик 32 конечного выключателя.
Для работы подъемной лебедки необходимо снять со звездочки 16 цепь 17 и накинуть её на рычаг 33 блокирующего механизма. Рычаг под действием веса цепи опускается и устанавливает ролик конечного выключателя в положение, при котором может быть осуществлено беспрепятственное включение и выключение тормоза подъемной лебедки.
Рис. 6. Лебедка для подъема стрелы экскаватора
ЭКГ - 4,6 А
. Расчет естественных электромеханических =f(Iя)
и механических = f(М) характеристик
Исходными уравнениями для расчета характеристик
ДПТ с независимым возбуждением являются соотношения:
где Uя - поминальное напряжение питания якорной цепи двигателя;
кФ - произведение конструктивного коэффициента двигателя и номинального магнитного потока возбуждения, (кФ) = const; Я - ток якорной цепи двигателя:
М - электромагнитный момент, развиваемый двигателем, М= (кФ)1я;
![]() - суммарное сопротивление якорной
цепи.
- суммарное сопротивление якорной
цепи. ![]() = Rдв + Rn,
- возможное дополнительное (пусковое, тормозное) сопротивление.
= Rдв + Rn,
- возможное дополнительное (пусковое, тормозное) сопротивление.
Произведение конструктивного
коэффициента к на номинальный поток возбуждения Ф можно определить по
паспортным данным из уравнения

где Е - номинальное значение угловой
скорости (рад/с), определяемое по значению скорости nн, об/мин:
![]() 1/с
1/с
Сопротивление якорной цепи
двигателя, приведённое к рабочей температуре. рассчитывается по формуле
 Ом
Ом
где Rя - внутреннее сопротивление
якорной обмотки двигателя; дп - сопротивление обмоток дополнительных полюсов; ш
- температура, при которой задаются сопротивления (15°С или 20°С); Rm -
сопротивление щёточных контактов
 Ом
Ом
где U - падение напряжения на щёточных контактах, принимается равным 2 В.
Если в паспортных данных не указано сопротивление якорной цепи, его можно найти по формуле
Поскольку статические характеристики
ДПТ с НВ имеют вид прямых линий, естественную электромеханическую
характеристику строим по двум точкам с координатами
![]()
Скорость холостого хода  1/c
1/c
Механическую характеристику строим по точкам
Номинальный момент Мн можно
определить как
![]() Нм
Нм
Вид естественных характеристик приведен на рис. 7.
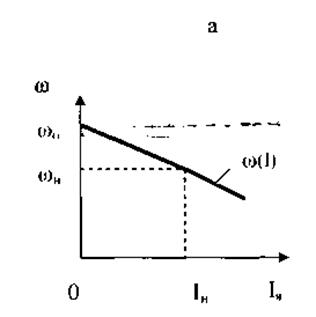
б
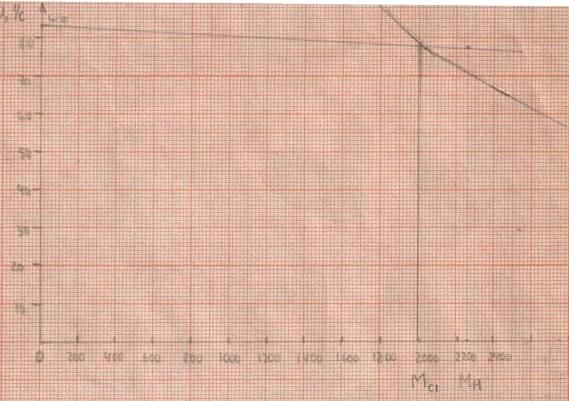
Рис. 7. Вид естественной электромеханической (а) и механической (б) характеристик
4. Расчет сопротивлений пусковых
реостатов
При пуске двигатель преодолевает момент инерции привода и механизма, он должен развивать значительно больший вращающий момент, чем при установившейся скорости.
Как известно, в начальный момент пуска ток двигателя может достигнуть большой величины. Однако по условиям коммутации он не должен превышать (2-3 )Ін.
Наряду с ограничением пускового тока необходимо также ограничивать ускорения и особенно ликвидировать так называемый рывок, который равен производной от ускорения (м/с3).
В зависимости от статического момента на валу различают следующие режимы пуска:
легкий, когда начальный статический момент не превышает 35-40% от Мн (насосы, вентиляторы, турбокомпрессоры);
нормальный, когда Мс = (40-100)% Мн (некоторые конвейеры, подъемные машины малой мощности и т.п.);
тяжелый, когда Мс > 100% Мн (скребковые и ленточные конвейеры, погрузочные машины, подъемники и др.).
Пуск двигателя осуществляется с помощью специального пускового реостата, сопротивление которого уменьшается по мере разгона двигателя.
Полную величину пускового реостата можно определить как
= R1 - Rдв, = 0,51 - 0,0784 = 0,432
Ом
Где  Ом
Ом
Задача расчета пускового режима сводится к определению секций Rn1 - Rnт. шунтируемых в процессе разгона двигателя контактами контакторов ускорения К1 - Кт. Схема пуска ДТП с НВ приведена на рис. 7.
Рис. 7. Схема включения пусковых
резисторов
Порядок расчета пусковых сопротивлений следующий.
Строим на отдельном графике естественную электромеханическую характеристику и наносим вертикальные линии, соответствующие токам переключения Imах, Iпер.
Максимальный ток переключения
принимаем равным пусковому: ах = Iп= 2,2Iн = 2,2 * 410 = 902 А, а минимальный
находим из соотношения Iпер = Imах/1 = 902/1,6 = 563,8 А
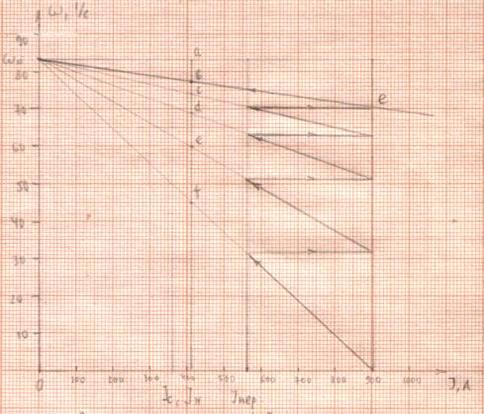
Рис. 8. Построение пусковой диаграммы
электропривод экскаватор реостат
При заданном числе пусковых ступеней
(т = 2…6) коэффициент кратности токов переключения. Примем m = 4
где ![]() - относительная величина
внутреннего сопротивления двигателя
- относительная величина
внутреннего сопротивления двигателя
 Ом
Ом
![]() - коэффициент кратности пускового и
номинального токов якоря,
- коэффициент кратности пускового и
номинального токов якоря,  Ом -
определяется по паспорту двигателя.
Ом -
определяется по паспорту двигателя.
Ток Ic1, соответствует моменту
статической нагрузки при пуске под нагрузкой Р1
 А
А
Для определения ![]() необходимо
построить дополнительную кривую
необходимо
построить дополнительную кривую ![]() (рис. 6, б) задаваясь значениями
скорости от 0,7 до 1,З.
(рис. 6, б) задаваясь значениями
скорости от 0,7 до 1,З.
Пересечение этой кривой с графиком
(М) даёт нам численное значение ![]() . Мощность Р1 указывается в задании
на КП в виде коэффициента.
. Мощность Р1 указывается в задании
на КП в виде коэффициента.
Тогда необходимое число пусковых
ступеней, Нм
= 2000 Нм
Строим пусковую диаграмму, учитывая, что по мере разгона двигателя (движение по характеристике 1 0 вверх от точки Imax ток уменьшается и может стать меньше значения Ic1. при котором двигатель остановится. Во избежание этого при токе Iпер пусковое сопротивление резко уменьшают настолько (на величину Rn1), чтобы при той же скорости вращения ток снова возрос до Iтах и перешел на новую искусственную характеристику ( 0 - 2).
Процесс повторяется до тех пор, пока двигатель не выйдет на естественную характеристику ( 0 - е) и не начнет работу под нагрузкой в соответствии с графиком P(t).
Если прямая, проведенная из точки 4, принадлежащей последней реостатной ступени, не выйдет на естественную характеристику, построение следует повторить, изменив значение тока Iпер.