Материал: Разработка интегрированной системы проектирования и управления колонны К-4 установки АВТ-4
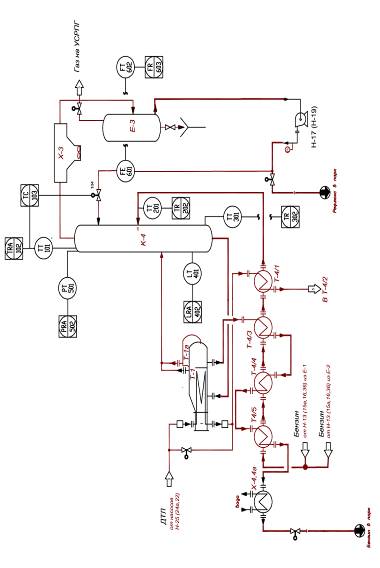

Рисунок 2 - Структура АСУТП
На полевом уровне расположены датчики и исполнительные механизмы, осуществляющие связь между АСУ ТП и технологическим процессом.
На нижнем уровне контроллеры АСУ ТП выполняют измерение параметров технологического процесса и управляют его протеканием. Передают, через коммуникационный сервер сетевого уровня, информацию на верхний уровень.
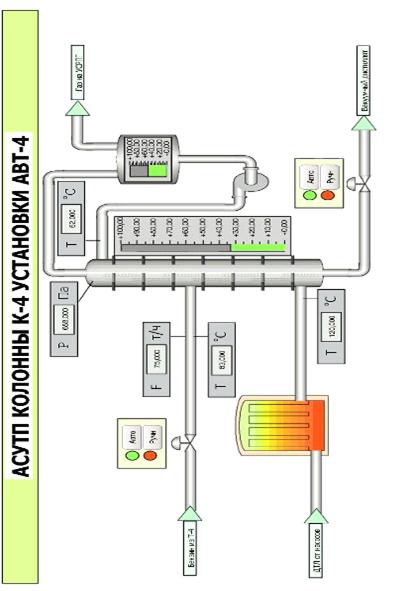
На верхнем уровне расположены операторские станции и сервер системы. На сервере системы располагается вся архивная информация, база данных ПО контроллеров. На операторских станциях отображается мнемосхема объекта, со всеми текущими, измеренными параметрами и оператор ведёт технологический процесс, имея всю нужную информацию на экране монитора.
В случае необходимости, основные параметры технологического
процесса могут передаваться в центральную диспетчерскую, головной офис, через
АСДУ по радиоканалу или телефонной линии.
Таблица 2 - Перечень технологических параметров, которые измеряются и регулируются и перечень сигнализаций и блокировок технологических параметров
|
№ |
Наиме-нование оборудования |
Крити- ческий параметр |
Величина устанавливаемого предела |
Блокировка |
Сигнализация |
Операция по отключению, включению, переключению и другому воздействию |
||||
|
|
|
|
|
min |
max |
min |
max |
min |
max |
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
1 |
Давление PICAH 215 |
Колонна К-4 |
10,5 кгс/см2 |
|
8,9 кгс/см2 (0,89 МПа) |
|
|
|
9,0 кгс/см2 (0,9 МПа) |
Свет, звук |
|
2 |
Уровень LICAHL 407 (LICAHL 408) |
Рибойлер Т-1 (Т-1а) |
|
21% |
79% |
|
|
20% |
80% |
Свет, звук |
|
3 |
Уровень LICAHL 416 |
Емкость Е-3 |
|
21% |
79% |
|
|
20% |
80% |
Свет, звук |
|
4 |
Уровень LALL 457 |
Емкость Е-3 |
|
11% |
|
10% |
|
10% |
|
Свет, звук. Остановка насоса Н-17 (Н-19) |
Описание автоматических функций управления и защиты
Система ПАЗ предусматривает:
· аварийную сигнализацию - оповещением оператора зажжением соответствующей надписи на экране мнемосхемы.
· автоматическую блокировку позиционера;
· предусматривается также ручная блокировка всех трех позиционеров (для этого введено специальное меню на мнемосхеме);
· приблизительный вариант программы ПЛК ПАЗ представлен ниже. В программе использовано 2 типа блоков: блоки сравнения (CMP) и блоки установки дискретной переменной (S).
Создание программы ПЛК ПАЗ в Step 7
5. Ввод в действие
Стадия ввод в действие предполагает проведение следующих этапов работ:
· Подготовка объекта автоматизации к вводу АСУ ТП в действие -
проводят работы по организационной подготовке объекта автоматизации к вводу АСУ ТП в действие, в том числе: реализацию проектных решений по организационной структуре АСУ ТП; обеспечение подразделений объекта управления инструктивно-методическими материалами; внедрение классификаторов информации;
· Подготовка персонала - проводят обучение персонала и проверку его способности обеспечить функционирование АСУ ТП;
· Комплектация АСУ ТП поставляемыми изделиями - программными и техническими средствами, программно-техническими комплексами, информационными изделиями;
· Пусконаладочные работы - проводят автономную наладку технических и программных средств, загрузку информации в базу данных и проверку системы её ведения; комплексную наладку всех средств системы;
· Проведение предварительных испытаний:
а) испытания АСУ ТП на работоспособность и соответствие техническому заданию в соответствии с программой и методикой предварительных испытаний;
б) устранение неисправностей и внесение изменений в документацию на АСУ ТП, в том числе эксплуатационную в соответствии с протоколом испытаний;
в) оформление акта о приёмке АСУ ТП в опытную эксплуатацию;
· Проведение опытной эксплуатации - проводят: опытную эксплуатацию АСУ ТП; анализ результатов опытной эксплуатации АСУ ТП; доработку (при необходимости) программного обеспечения АСУ ТП; дополнительную наладку (при необходимости) технических средств АСУ ТП; оформление акта о завершении опытной эксплуатации;
· Проведение приемочных испытаний:
а) испытания на соответствие техническому заданию в соответствии с программой и методикой приёмочных испытаний;
б) анализ результатов испытания АСУ ТП и устранение недостатков, выявленных при испытаниях;
в) оформление акта о приёмке АСУ ТП в постоянную
эксплуатацию.
Заключение
Разработана концепция, архитектура АСУ ТП колонны К-4 стабилизации бензина установки АВТ-4 ООО «Новоуфимский НПЗ». Выбраны средства автоматизации фирмы SIEMENS. Составлена мнемосхема в SCADA-пакете WinCC. Составлена программа работы аварийной сигнализации и блокировки в пакете программирования ПЛК SIMATIC STEP 7. Разработанная АСУТП является современной, надежной, функциональной, удобной, и рассматривается как хорошая замена предыдущей АСУТП данного объекта.
Изучены стадии создания АС по ГОСТ 34.601-90.
Литература
1. Анищенко, В.С. Динамические системы / В.С. Анищенко // Соросовский образовательный журнал. - 2009. - №11. - М. - С. 77--84
. Васильков, Ю.В. Компьютерные технологии моделирования: учеб. пособие / Ю. В. Васильков - М.: Финансы и статистика, 2010. - 256 с.
. Введение в математическое моделирование: учебное пособие / под ред. П.В. Трусова; рецензенты: А.Р. Абдулаев, В. П. Матвиенко; Министерство образования РФ.- М.: Логос, 2004.- 440 с..
. Данилов, Ю.А. Лекции по нелинейной динамике. Элементарное введение: учеб. пособие / Ю.А. Данилов.; - 2-е изд. - М.: КомКнига, 2011. - 208 с.
. Новик,
И.Б. О философских вопросах кибернетического моделирования / И.Б. Новик - М.:
Знание, 2010.