Материал: Расчет автоматического регулятора скорости вращения вала двигателя
Расчет автоматического регулятора скорости вращения вала двигателя
Министерство образования и науки Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
Сибирская государственная автомобильно-дорожная академия (СибАДИ)
Кафедра «Автоматизация производственных процессов и электротехника»
Дисциплина
«Автоматическое регулирование и управление двигателей внутреннего сгорания»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
Обозначение проекта КП 02068982 - 140501 - 15 -14
Тема
проекта: Расчет автоматического регулятора скорости вращения вала двигателя
Студент Юсипов Руслан
Омск - 2014
Оглавление
Введение
1. Основные сведения
2. Математическая модель регулятора
3. Математическая модель ДВС
Заключение
Список
используемой литературы
Введение
Двигатели внутреннего сгорания занимают в энергетике ведущее место по количеству вырабатываемой энергии. Особо существенна роль двигателей в автомобильном, водном транспорте, в стационарной энергетике. Вследствие низкой устойчивости режимов дизелей чрезвычайно трудно обеспечивать их работу в эксплуатационных условиях и особенно в тех случаях, когда нагрузка оказывается переменной во времени или незначительна.
Именно поэтому двигатели внутреннего сгорания снабжают автоматическими регуляторами частоты вращения, а в некоторых случаях и другими устройствами.
Проблема регулирования дизелей с учетом эксплуатационных условий их работы имеет большое практическое значение. Система автоматического регулирования предназначена для обеспечения качественной работы как на стационарных режимах, так и на неустановившихся, когда изменения параметров процессов особо сильно влияют на эффективные показатели работы силовой установки в целом.
Исследование динамики регулирования дизелей показывает, что пока еще не решены такие вопросы, как обеспечение максимальной эксплуатационной надежности, оптимальное управление в условиях резко выраженной динамики изменения нагрузки, обеспечение качества переходных процессов дизеля при сбросах или набросах нагрузки и т. п.
При разработке новых или модернизации существующих двигателей, а также при доводке систем автоматического регулирования следует прежде всего обеспечить надежность и устойчивость работы их работы с максимально возможной производительностью и экономичностью.
Доводка систем автоматического регулирования производится на уровне экспериментальных исследований, когда знание происходящих в системе процессов позволяет ускорить доводку и обеспечить наибольшее качество создаваемой продукции.
двигатель регулятор автоматический
скорость
1. Основные сведения
Единственным признаком появления в процессе
работы двигателя неустановившихся режимов является: изменение во времени
одного, нескольких или всех параметров.
![]()
При возникновении неустановившихся режимов нарушаются условия статического равновесия, в результате чего в двигателе оказывается неустойчивое равновесие.
Изменение параметров параметров двигателя во
времени называют переходными процессами, они являются важнейшими динамическими
характеристиками определяющими динамические свойства.
Рис. 1. Схема
![]()
![]() - установившийся режим
- установившийся режим
где ![]()
![]() - приведённый к валу момент инерции
вращающих частиц;
- приведённый к валу момент инерции
вращающих частиц; ![]()
![]() - угловая скорость коленчатого
вала;
- угловая скорость коленчатого
вала; ![]()
![]() - момент коленчатого вала;
- момент коленчатого вала; ![]()
![]() - момент сопротивления.
- момент сопротивления.
![]()
Если ![]()
![]()
Если ![]()
![]() - увеличивается;
- увеличивается;
Если - уменьшается.
![]()
![]()
![]()
![]()
![]()
где ![]()
![]() - нагрузка
- нагрузка
По Тейлору
![]()
![]()
Момент зависит от положения рейки и
частоты вращения и давления
![]()
![]()
![]()
Фактор устойчивости двигателя
![]()
![]()
![]()
![]()
![]()
![]()
где ![]()
![]() - перемещение рейки насоса
- перемещение рейки насоса

Рис.2. Структурная схема регулятора
Момент на валу двигателя при
заданной частоте вращения
![]()
![]()
![]()
![]()
![]()
![]()
Рис. 3.
. Математическая модель регулятора
Основное уравнение описывающие динамическую работу регулятора
Основное уравнение описывающие динамическую работу регулятора.
Это уравнение статистической муфты
5, которое заключается в равенстве поддерживающей силы ![]()
![]() и восстанавливающей силы
и восстанавливающей силы ![]()
![]() .
.
![]()
При нарушении статистического режима
поддерживающая сила получает приращение ![]() оно вызывает перемещение муфты
оно вызывает перемещение муфты ![]() получило
приращение
получило
приращение ![]()
На точку А стала действовать сила ![]()
![]() и сила гидравлического трения
и сила гидравлического трения ![]()
![]()
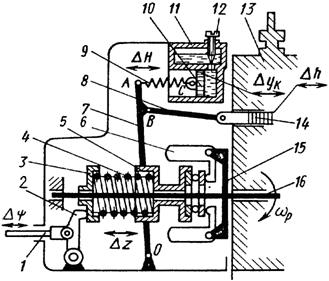
Рис. 4. Схема прецизионного
механического регулятора 1 , 8 - тяги; 2, 7 - рычаги; 3 - тарелка; 4, 9 -
пружины; 5 - муфта; 6 - груз; 10 - поршень; 11 - катаракт; 12 - игла; 13 -
топливный насос; 14 - рейка; 15 - траверса; 16 - кулачковый валик.
Уравнение силы гидравлического
трения
![]()
где ![]()
![]() - коэффициент гидравлического
трения;
- коэффициент гидравлического
трения; ![]()
![]() - скорость перемещения муфты.
- скорость перемещения муфты.
![]()
![]()
где ![]()
![]() - угловая скорость вала регулятора;
- угловая скорость вала регулятора;
![]()
![]() - угловая скорость вала двигателя.
- угловая скорость вала двигателя.
![]()
![]()
![]()
Рис. 5. Характеристики
поддерживающей силы механического чувствительного элемента, приведенной к оси
движения муфты
- ![]()
![]()
-5 - ![]()
![]()
![]()
где ![]()
![]() - жёсткость пружины;
- жёсткость пружины; ![]()
![]() - передаточное отношение рычага;
- передаточное отношение рычага; ![]()
![]() - перемещение поршня
- перемещение поршня
![]()
![]()
![]()
![]()
![]()
![]()
Динамические свойства регулятора с
кататором
![]()
 ;
;  ;
; 
 ;
; 
Рис. 6. Структурная схема регулятора
Уравнение движения поршня (механизм
Катаракт)

 ;
; 
Рис. 7. Структурная схема регулятора
Рис. 8. Структурная схема регулятора
 ;
;  ;
;  ;
;  ;
;  ;
;  .
.
Рис. 9. Структурная схема регулятора
Рис. 10. Схема всережимного
регулятора: 1 - рейка; 2 - тяга; 3, 5, 9 - рычаги; 4, 7, 15 - пружины; 6 -
винт; 8 - ролик; 10 - муфта; 11 - груз; 12 - траверса; 13 - повышающая зубчатая
передача; 14 - валик.
Рис. 11. Структурная схема комплекса
«нагрузка-двигатель-регулятор»
. Математическая модель ДВС
Исходные данные:
Число оборотов коленчатого вала n0 = 1500 об/мин;
Мощность двигателя N0 = 240 кВт;
Нагрузка Е0 = 140 Н.
![]()
Таблица 1 - Зависимость момента на
валу двигателя от частоты вращения
w
0,25M
0,5M
0,75M
M
Mc
0,2
31,41593
290,2986
580,5972
870,8958 61,1155
0,25
39,26991
310,3521
620,7043
931,0564
1241,409
95,49297
0,3
47,12389
328,4958
656,9916
985,4874
1313,983
137,5099
0,35
54,97787
344,7296
689,4592
1034,189
1378,918
187,1662
0,4
62,83185
359,0536
718,1071
1077,161
1436,214
244,462
0,45
70,68583
371,4676
742,9353
1114,403
1485,871
309,3972
0,5
78,53982
381,9719
763,9437
1145,916
1527,887
381,9719
0,55
86,3938
390,5662
781,1325
1171,699
1562,265
462,186
0,6
94,24778
397,2507
794,5015
1191,752
1589,003
550,0395
0,65
102,1018
402,0254
804,0508
1206,076
1608,102
645,5324
0,7
109,9557
404,8902
809,7804
1214,671
1619,561 0,75
117,8097
405,8451
811,6902
1217,535
1623,38
859,4367
0,8
125,6637
404,8902
809,7804
1214,671
1619,561
977,848
0,85
133,5177
402,0254
804,0508
1206,076
1608,102
1103,899
0,9
141,3717
397,2507
794,5015
1191,752
1589,003
1237,589
0,95
149,2257
390,5662
781,1325
1171,699
1562,265
1378,918
1
157,0796
381,9719
763,9437
1145,916
1527,887
1527,887
1,05
164,9336
371,4676
742,9353
1114,403
1485,871
1684,496
1,1
172,7876
359,0536
718,1071
1077,161
1436,214
1848,744
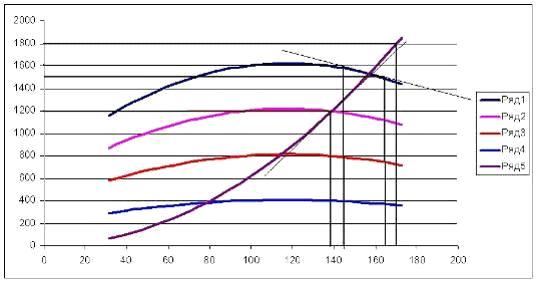
По полученным данным строим графики
и определяем визуально точки пересечения графиков, занося их в таблицу 2.
Рис. 12. Зависимость момента
на валу двигателя от частоты вращения
Соответственно. На касательных берем по две
произвольные точки и опускаем перпендикуляры к осям. Вычитаем получившиеся
значения и получаем конечный результат.
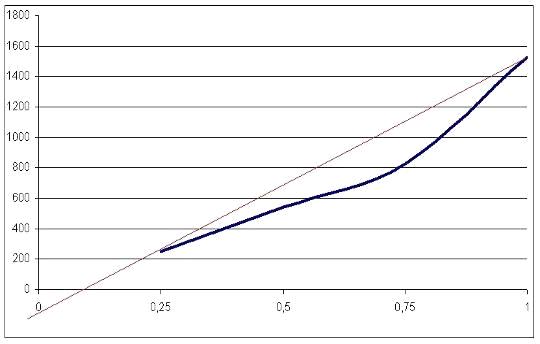
Таблица 2 - Зависимость момента двигателя от
положения рейки (в %)
k
M
0,25
255.7847
0,5
544
0,75
829
1 Рис. 13. Зависимость момента двигателя от
положения рейки (в %)
Расчитываем остальные недостающие данные:
Результаты моделирования
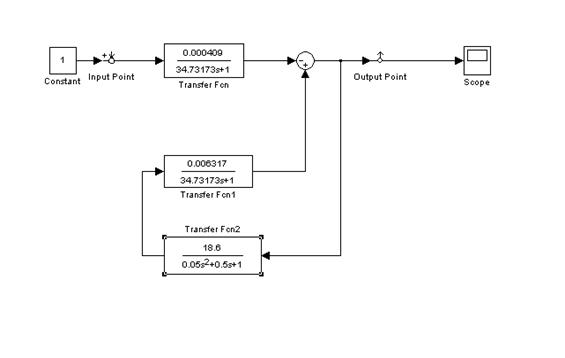
Рис. 14. Структурная схема системы
автоматического регулирования угловой скорости двигателя внутреннего сгорания
(дизеля) в обозначениях Simulink.
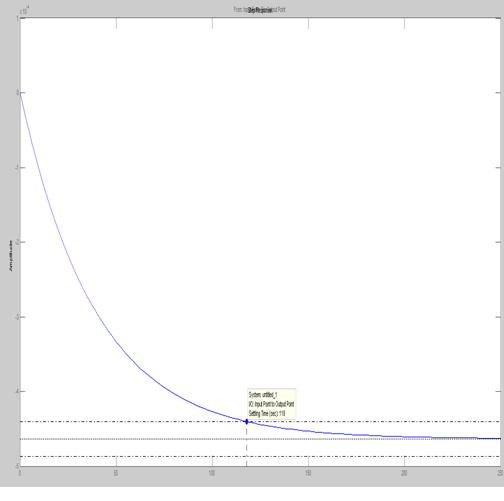
Таблица 3 - полученные результаты
перерегулирования
м
н
0,01
0,02
0,03
0,04
0,05
0,1
118
118
118
118
118
0,2
118
118
118
118
118
0,3
118
118
118
118
118
0,4
118
118
118
118
118
0,5
118
118
118
118
118
Рис. 15. Время перерегулирования при м = 0,01
Заключение
В данной курсовой работе был выполнен расчет
автоматического регулятора, предназначенного для поддержания скорости вращения
вала ДВС на заданном уровне.
Для наиболее оптимальной работы двигателя
необходимо учесть, что t
(время переходного процесса) должно быть минимально. Из расчета видно, что
время переходного процесса минимально при любом коэффициенте гидравлического
трения в пределах от 0,1 до 0,5 и при массе шариков от 0,01 до 0,05 г.
Список используемой литературы
1. Крутов В.И. Автоматическое
регулирование и управление двигателей внутреннего сгорания: Учебник для
студентов ВУЗов, обучающихся по специальности «Двигатели внутреннего сгорания».
- 5-е изд., перераб. и доп. М.: Машиностроение, 1989 г. - 416 с.
. Лекции по дисциплине
«Автоматическое регулирование и управление двигателей внутреннего сгорания».
. Щербаков B.C.,
Руппель А.А., Лазута И.В., Милюшенко С.А. Автоматические системы управления в
среде MATLAB-SIMULINK:
Методические указания к выполнению лабораторных работ. - Омск: СибАДИ, 2010. -
49 с.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 тогда
тогда
![]()
![]()