DICOM PS3.3 2020a - Information Object Definitions |
Page 575 |
|
|
|
|
|
|
|
|
|
|
Modality |
|
|
VOI |
|
|
P |
|
|
DISPLAY |
LUT |
|
|
LUT |
|
|
LUT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Stored
Values
|
Real-Value LUT Data (0040,9212) |
|
|
|
|
|
|
|
Real World |
|
Value |
Unit |
|
|
or |
|
|
|
Measurement Units |
|
|
|
|
Real World Value |
Value |
Code Sequence |
|
Intercept and Slope attributes |
|
|
|
(0040,08EA) |
|
|
|
|
|
|
|
|
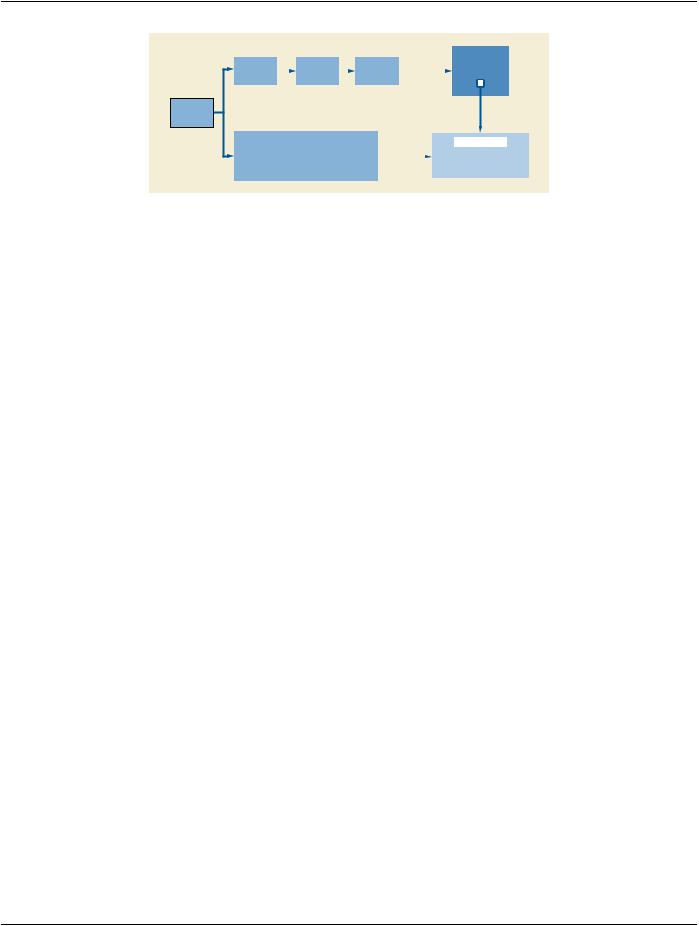
Figure C.7.6.16-6. The Real World Value LUT and the Image Viewing Pipeline
Note
For example, MR images may contain data that is not only the result of the physical/chemical properties of the scanned anatomy, but may also contain information that is representing real world values, such as, temperature [in degrees C], flow [in l/min], speed [in m/sec], relative activity [in %], relative contrast enhancement [in %], diffusion [in sec/mm2], etc.
In some cases the conversion from Stored Values to Real World Values can be linear (through "slope" and "intercept") or non-linear (through look-up tables).
Both transformation methods can be applied to one range of stored values. Overlapped ranges might be used for different represent- ations such as log versus linear scales or for different representations in units such as cm/sec versus mm/sec. Alternative methods can be identified by the labels assigned to the transformations.
C.7.6.16.2.11.1.2 Real World Values Mapping Sequence Attributes
The Real World Value First Value Mapped (0040,9216) and Real World Value Last Value Mapped (0040,9211) Attributes describe the range of stored pixel values that are mapped by the Sequence Item. Stored pixel values less than the first value mapped, or greater than the last value mapped have no real value attached.
When the Real World Value Intercept (0040,9224) and Real World Value Slope (0040,9225) Attributes are supplied, the stored value (SV) is converted to a real world value (RV) using the equation:
RV = (Real World Value Slope) * SV + Real World Value Intercept
When the Real World Value LUT Data (0040,9212) Attribute is supplied, Real World Values are obtained via a lookup operation. The stored pixel value of the first value mapped is mapped to the first entry in the LUT Data. Subsequent stored pixel values are mapped to the subsequent entries in the LUT Data up to a stored pixel value equal to the last value mapped.
The number of entries in the LUT data is given by:
Number of entries = Real World Value Last Value MappedReal World Value First Value Mapped + 1
Note
If the stored pixel values that are encoded as floating point rather than integer values, only the equation and not the lookup operation is defined.
TheValueRepresentationofRealWorldValueFirstValueMapped(0040,9216)andRealWorldValueLastValueMapped(0040,9211) (US or SS) is determined by the value of Pixel Representation (0028,0103) in the case of integer pixel data, or is SS in the case of floating point pixel data if these Attributes are present.
Note
In practice, integer values may well be sufficient to define an input range that exceeds the actual stored floating point pixel value range. The reason to permit floating point alternatives to an integer range is that sometimnes the stored floating point values may be very large and exceed what can be specified as an integer value.
 >Include Table C.11-2b “VOI LUT Macro Attributes”
>Include Table C.11-2b “VOI LUT Macro Attributes”