Материал: Организация беспроводного ближнего канала связи контрольного пункта телемеханики с переносным пультом управления
Верхний уровень - уровень управления из районных или местных диспетчерских пунктов (серверы ввода-вывода, АРМ диспетчера).
Сетевой уровень - коммуникационное оборудование.
Средний уровень - линейные контрольные пункты (щиты линейной теле-механики ЩТМ, построенные на базе логических программируемых контроллеров).
Нижний уровень - непосредственно исполнительные механизмы и устройства, датчики и приборы.
Специфическими особенностями телемеханики являются:
удалённость объектов контроля и управления;
необходимость высокой точности передачи измеряемых величин;
недопустимость большого запаздывания сигналов;
высокая надёжность передачи команд управления;
высокая степень автоматизации процессов сбора информации.
Таким образом, внедрение телемеханических систем позволяет
сократить численность обслуживающего персонала, уменьшает простои оборудования,
освобождает человека от работы во вредных для здоровья условиях
1.3 Актуальность разработки автоматизированной системы технологического процесса удаленного контрольного пункта телемеханики
КП телемеханики связано с диспетчерским пунктом удаленно на большом расстояний. Целесообразно для обслуживающего персонала использовать на месте отдельное устройство. Так как этот персонал работает непосредственно на объекте, то ему небезопасно находиться в близости к шкафу управления, который в свою очередь находится во взрывоопасной зоне.
Возникает потребность обезопасить работу обслуживающего персонала. Самый рациональный и возможно единственный способ это вывести органы управления и сбора информаций КП телемеханики за пределы взрывоопасной зоны. Для решения поставленной задачи предлагается использование беспроводной связи для удобства пользования и отсутствием необходимости монтажа кабелей.
Для устранения данных проблем рекомендуется применение автоматизаций средствами вычислительной техники с программно-аппаратной реализацией
В проекте будет применяться программно-аппаратная реализация на базе двух устройств приемника и передатчика.
В качестве аппаратной составляющей в передатчике используются два устройства объединённых в одно: микроконтроллера для сбора данных через аналого-цифровой преобразователь и устройства беспроводной передачи. В приемнике используется только устройство беспроводной связи для подключения к переносному пульту.
В качестве программной составляющей осуществляющей первичную об-работку применяется шестиканальный аналого-цифровой преобразователь микроконтроллера задействованный подключаемыми библиотеками.
Аналого-цифровые преобразователи являются устройствами, которые принимают входные аналоговые сигналы и генерируют соответствующие им цифровые сигналы, пригодные для обработки микропроцессорами и другими цифровыми устройствами.
Разрешение преобразователя составляет 10 двоичных разрядов, что позволяет на выходе получать значения от 0 до 1023. Эти числа соответствуют напряжениям в пределах от 0 до 5 вольт.
Многоканальность означает, что на входе единственного модуля аналого-цифрового преобразователя установлен аналоговый мультиплексор, который может подключать этот вход к различным выводам микроконтроллера для осуществления измерений нескольких независимых аналоговых величин с разнесением по времени. Входы мультиплексора могут работать по отдельности (в несимметричном режиме для измерения напряжения относительно «земли») или (в не-которых моделях) объединяться в пары для измерения дифференциальных сигналов. Иногда аналого-цифровой преобразователь дополнительно снабжается усилителем напряжения с фиксированными значениями коэффициента усиления 10 и 200.
Сам аналого-цифровой преобразователь представляет собой преобразователь последовательного приближения с устройством выборки-хранения и фиксированным числом тактов преобразования, равным 13 (или 14 для дифференциального входа; первое преобразование после включения потребует 25 тактов для инициализации аналого-цифрового преобразователя). Тактовая частота формируется аналогично тому, как это делается для таймеров- с помощью специального предделителя тактовой частоты микроконтроллера, который может иметь коэффициенты деления от 1 до 128. Но в отличие от таймеров, выбор тактовой частоты аналого-цифрового преобразователя не совсем произволен, т.к. быстро-действие аналоговых компонентов ограничено. Поэтому коэффициент деления следует выбирать таким, чтобы при заданной частоте кварцевого генератора тактовая частота аналого-цифрового преобразователя укладывалась в рекомендованный диапазон 50-200 кГц (т.е. максимум около 15 тыс. измерений в секунду). Увеличение частоты выборки допустимо, если не требуется достижение наивысшей точности преобразования.
Разрешающей способности для большинства типовых применений достаточно. Абсолютная погрешность преобразования зависит от ряда факторов и в идеальном случае не превышает ±2 младших разрядов, что соответствует общей точности измерения примерно 8 двоичных разрядов. Для достижения этого результата необходимо принимать специальные меры: не только «вгонять» тактовую частоту в рекомендованный диапазон, но и снижать по максимуму интенсивность цифровых шумов. Для этого рекомендуется, как минимум, не использовать оставшиеся выводы того же порта, к которому подключен АЦП, для обработки цифровых сигналов, правильно разводить платы, а как максимум - дополнительно к тому еще и включать специальный режим ADC Noise Reduction (спящий режим).
В этом режиме останавливается процессор, но АЦП, внешние прерывания, TWI, таймер / счетчик, сторожевой таймер (если включен) продолжают работать.
Отметим также, что АЦП может работать в двух режимах: одиночного и непрерывного преобразования. Второй режим целесообразен лишь при максимальной частоте выборок. В остальных случаях его следует избегать, т.к. обойти в этом случае необходимость параллельной обработки цифровых сигналов, как правило, невозможно, а это означает снижение точности преобразования.
Для сопряжения одного устройства беспроводной связи с переносным пультом используется порт USB, для другого устройства с микроконтроллером используется прямое соединение. В обоих случаях работает стандарт UART/TTL.
Программно-технический комплекс имеет трехуровневую
структуру, как показано на рисунке 1.1.
Рисунок 1.1 - Трехуровневая иерархическая структура
Таким образом, необходимо организовать использование
беспроводной связи для более удобных и безопасных условий труда.
1.4 Постановка цели и задач на дипломное проектирование
Целью дипломного проектирования является повышение качества обслуживания контрольного пункта телемеханики за счет разработки для него программно-аппаратного средства, решающего задачи автоматизации и безопасности.
Для контролируемого пункта телемеханики необходимо разработать подсистему беспроводной связи ближнего радиуса действия.
Необходимо разработать программно-аппаратное средство выводящее органы сбора информаций КП телемеханики за пределы взрывоопасной зоны в которую попадает находящийся на объекте обслуживающий персонал.
Разрабатываемая подсистема должна обеспечивать передачу информации по беспроводному каналу связи от КП ТМ в переносной пульт управления системы телемеханики, который может размещаться на удалении от 100 до 1000 м. от КП.
Для решения поставленной задачи возможно использование беспроводной связи.
Для достижения этой цели необходимо решить следующие задачи:
) Выбрать технические средства, на которых будет решена задача. Устройства должны быть совместимы как между собой так и со средой применения.
) Подобрать контроллер разрядность АЦП которого позволяет производить измерения аналоговых датчиков не выходя за рамки допустимой погрешности.
) Реализовать АЦП на контроллере.
) Подобрать устройство связи позволяющее передавать сигнал на необходимое и достаточное расстояние без потерь.
) Создать программное средство позволяющее в наглядной форме про-изводить считывание данных оператором.
) Учесть требования по энергопотреблению в первую очередь по причине экономий заряда батарей. Так как питание на объекте автономное. Сеть постоянного тока 5 В.
) Обеспечить работоспособность в диапазоне рабочих температур - 40..+60С
) Провести экономическое обоснование разрабатываемого программно-аппаратного средства. Устройство должно иметь адекватную цену.
) Обеспечить безопасность условий труда.
2. Проектный раздел
Для решения всех поставленных задач дипломного проектирования, касающихся разработки программно-аппаратного средства для построения автоматизированной системы, следует выбрать гибкий и эффективный язык программирования, позволяющий создать современный, интуитивно понятный и удобный пользовательский интерфейс. Кроме этого, необходимо учитывать совместимость оборудования, так как все компьютеры технико-эксплуатационной части работают под управлением операционных систем семейства Windows от компании Microsoft. Разработана структурная схема подсистемы ближней связи контрольного пункта системы телемеханики, которая представлена в приложений Б, рисунок Б.1.
.1 Выбор и разработка аппаратных средств автоматизаций
Основой разрабатываемой системы служит программируемый контроллер. Так как в рамках разрабатываемого проекта необходимо использование аналого-цифрового преобразования, то используется микроконтроллеров, поскольку практически во всех микроконтроллерах присутствует аналого-цифровое преобразование.
Выбор пал на популярное семейство 8-ми разрядных микроконтроллеров фирмы Atmel, в котором был выбран ATmega328. Здесь присутствует 10-ти битный аналого-цифровой преобразователь работающий по напряжению 0..5В.
Внешний вид микросхемы приведен на рисунке 2.1 [5].
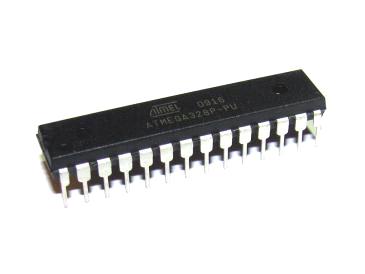
Рисунок 2.1 - Микроконтроллер ATMEGA328
Кристалл прост в программирований, имеет низкое энергопотребление, низкую стоимость, малые габариты и высокую отказоустойчивость.содержит аж 32кБайта встроенной flash памяти, что по меркам микроконтроллера ну просто очень много для решения многих задач. Тем не менее у микроконтроллера так же достаточно большой объем оперативной памяти 2кБайта
Производительность составляет до 20 миллионов итераций в секунду (MIPS).функционируют при напряжениях питания от 1,8 до 6,0 Вольт. Ток потребления в активном режиме зависит от величины напряжения питания и частоты, на которой работает микроконтроллер, и составляет менее 1 мА для 500 кГц, 5..6 мА для 5 МГц и 8..9 мА для частоты 12 МГц.могут быть переведены программным путем в один из трех режимов пониженного энергопотребления.
Тип корпуса DIP28. Также как и другие кристаллы имеет хорошую термостойкость и работает в диапазоне -45..85 градусов Цельсия.
Расположение выводов микросхемы представлено на рисунке 2.2
[3].
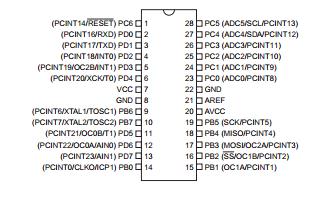
Рисунок 2.2 - Порты ввода / вывода ATMEGA328
Далее необходимо выбрать устройство для беспроводной передачи данных и выбор пал на APC220 фирмы APPCON Technologies. Данный передатчик обладает достаточной помехозащищенностью и дальностью связи при этом имея низкое энергопотребление, невысокую стоимость и малые габариты. Несомненное преимущество это наличие прозрачного UART интерфейса, что позволяет без проблем подключаться как к микроконтроллеру так и к переносному пульту управления.
Передатчик имеет удобный модульный способ монтажа. Два режима работы: приёмник, передатчик. Стандарт передачи данных проприетарный (закрытый). Так же имеет высокоскоростной встроенный микроконтроллер и высокопроизводительный чип ADF7020-1, с возможностью само - коррекции ошибок кодирования.
Скорость передачи данных достаточная для решения задачи 19 кбит/с. Мощность передатчика 13 дБ, а чувствительность приемника -113 дБ.
Режим холостого хода. Прекращает работу только процессор и фиксируется содержимое памяти данных, а внутренний генератор синхросигналов, таймеры, система прерываний и сторожевой таймер продолжают функционировать. Ток потребления не превышает 2,5 мА на частоте 12 МГц.
Стоповый режим. Сохраняется содержимое регистрового файла, но останавливается внутренний генератор синхросигналов, и, следовательно, останавливаются все функции, пока не поступит сигнал внешнего прерывания или аппаратного сброса. При включенном сторожевом таймере ток потребления в этом режиме составляет около 80 мкА, а при выключенном - менее 1 мкА. (Все приведенные значения справедливы для напряжения питания 5 В).
Экономичный режим. Продолжает работать только генератор таймера, что обеспечивает сохранность временной базы. Все остальные функции отключены.
Мощные выходные драйверы обеспечивают токовую нагрузочную способность 20 мА на линию порта (втекающий ток) при максимальном значении 40 мА, что позволяет, например, непосредственно подключать к микроконтроллеру светодиоды и биполярные транзисторы. Общая токовая нагрузка на все линии одного порта не должна превышать 80 мА (все значения приведены для напряжения питания 5 В).
При всех вышеуказанных характеристиках устройства могут связываться между собой на расстояний до 1 км.
Следует упомянуть на какой частоте передаются данные на такое не самое маленькое расстояние. Рабочая частота 418..455 Mhz. По сравнению с другими устройствами работающие на частоте 2.4 Ghz выбранное устройство с более меньшей частотой применять целесообразней, поскольку требуются меньшие габариты и меньшее энергопотребление.
Устройство беспроводной передачи данных APC220 и назначение его
выводов показаны на рисунках 2.3 и 2.4 соответственно [5].

Рисунок 2.3 - Устройство передачи данных APC220
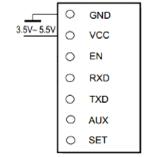
Рисунок 2.4 - Порты ввода / вывода APC220
Для обеспечения работы микроконтроллера и тестирования его работы требуются сопутствующие компоненты микроэлектроники: обвязки, кварцевый генератор, программатор и т.д. Так как травление платы не является обязательным условием, да и выглядит это не очень эстетично было решено закупить готовую отладочную плату, которая плюс ко всему стоит ненамного дороже отдельных её компонентов в сумме.
Также данное решение комплектуется собственной
кроссплатформенной средой разработки, которая еще и позволяет легко и просто
использовать устройство, что является неотъемлемым плюсом для конечного
пользователя. Внешний вид платы представлен на рисунке 2.5 [4].

Рисунок 2.5 - Отладочная плата
Плата имеет свое расположение выводов в отличие от микроконтроллера.
Все элементы автоматики подбираются таким образом, что бы в случае поломки их можно было легко заменить.
С учетом вышесказанного можно выбрать программную платформу.
Выбор ложится на кроссплатформенную среду разработки Arduino IDE идущей в комплекте с отладочной платой и удовлетворяющей всем потребностям одновременно и разработчика и конечного пользователя.