Материал: Моделирование кинематических и динамических характеристик разгона колесного трактора с системой топливоподачи CommonRail
регуляторная ветвь, при![]()
![]() (16.1)
(16.1)
в диапазоне ![]()
 (16.2)
(16.2)
где,
![]() - минимально возможная угловая
скорость двигателя;
- минимально возможная угловая
скорость двигателя;
![]() - угловая скорость, соответствующей
максимальному значению крутящего момента двигателя;
- угловая скорость, соответствующей
максимальному значению крутящего момента двигателя;
![]() - соответствует максимальному
значению эффективной мощностиNe;
- соответствует максимальному
значению эффективной мощностиNe; ![]() - угловая скорость при холостом
ходе;
- угловая скорость при холостом
ходе;
![]() - крутящий момент, соответствующий
Ne.
- крутящий момент, соответствующий
Ne.
В данных выражениях коэффициенты a,
b и c определяются следующим образом (17.1), (17.2), (17.3):
![]() (17.1)
(17.1)
![]() ; (17.2)
; (17.2)
![]() (17.3)
(17.3)
Значения коэффициентов приспособляемости выбирают из диапазона kw=1,45...2; kм=1,1...1,5 на основе экспериментально полученных характеристик.
Дифференциальное уравнение движения
трактора будет иметь вид (18):
![]() , (18)
, (18)
Для расчетной модели получаем следующую систему уравнений:
.при пробуксовке сцепления
![]()
![]()
. при замкнутом сцеплении
![]()
![]() ,
,
Рассмотрим пять наиболее важных этапов при процессе разгона трактора:
Сцепление выключено, двигатель работает с постоянной угловой скоростью. Машина неподвижна.
Сцепление включается. Его момент достигает величины Mсопр. Машина неподвижна; угловая скорость двигателя снижается.
Момент сцепления Mф выше момента сопротивленияMсопр. Машина трогается, угловая скорость двигателя снижается.
Момент фрикциона (сцепления) имеет максимальное значение. Машина разгоняется; угловая скорость двигателя снижается; угловая скорость колес увеличивается. В конце данной фазы происходит выравниваниеωдв иωк, то есть сцепление замыкается.
На данной фазе происходит увеличение угловой скорости двигателя и машины до некоторого установившегося значения.
Моделирование характеристик дизельного двигателя с системой топливоподачи CommonRail.
Сцепление выключено, двигатель работает с постоянной угловой скоростью. Машина неподвижна.
Сцепление включается. Его момент достигает величины Mсопр. Машина неподвижна; угловая скорость двигателя снижается.
Момент сцепления Mф выше момента сопротивленияMсопр. Машина трогается, угловая скорость двигателя снижается.
Момент фрикциона (сцепления) имеет максимальное значение. Машина разгоняется; угловая скорость двигателя снижается; угловая скорость колес увеличивается. В конце данной фазы происходит выравниваниеωдв иωк, то есть сцепление замыкается.
На данной фазе происходит увеличение
угловой скорости двигателя и машины до некоторого установившегося значения.
6.Алгоритм реализации задачи
ВоспользовавшисьГОСТ 19.701-90 представляю
алгоритм реализации задачи в виде блок-схемы (рисунок 5.1)
Рисунок 5.1- Схема алгоритма главной программы
7.Программная реализация задачи
ВсредеDelphi
{ Private declarations }
{ Public declarations };: TForm1;Unit2;
{$R *.dfm}=array[1..6] of extended;=array[1..5] of extended;=array of array of extended;,I2,I3,I4,I5: extended;,r2,u1,u2,KPD1,KPD2,k23,k36,k34,k35,k,t:extended;,Mf,Fk1,Fk2,mx:extended;,M34,M35,M36,Fkr,Fkr1,Fkr2,Mcpr,f1,f2:extended;,Mdv0,Mdvn,wMdvn,wMdvmax,Mdvmax,wmax,a,d,c,kw,km:extended;,Mfmax,tmax,kfric:extended;,Ff2,Rz1,Rz2,fc1,M,K2,d2,fmax,k1,l1,l2,ht,e23:extended;: TextFile;MOMENT(w:extended;varMdv:extended);:=1.1;:=2;:=(km*kw*(2-kw)-1)/(kw*(2-kw)-1);:=-(2*kw*(km-1))/(kw*(2-kw)-1);:=((kw*kw)*(km-1))/(kw*(2-kw)-1);(w>=w0) and (w<wMdvn) then:=Mdvn*(a+(d*(w/wMdvn))+(c*((w/wMdvn)*(w/wMdvn))));(w>=wMdvn) and (w<=wMdvmax) then:=Mdvn*((wMdvmax-w)/(wMdvmax-wMdvn));;MOMENT_FRIC(t:extended;varmf:extended);:=MFmax*(1-exp(-kfric*t));;Disel(n:integer; t1:extended; var x,x1:massiv1);(x[1],Mdv);_fric(t1,Mf);abs(x[1]-x[2])>0.1 then[1]:=(Mdv-Mf)/I1;[2]:=(Mf-M23-k23*(x[2]-x[3]))/I2;[1]:=(Mdv-M23-k23*(x[1]-x[2]))/I1;[2]:=x1[1];;[3]:=(M23+k23*(x[2]-x[3])-M34+k34*(x[3]-x[4])+M36+k36*(x[3]-x[5]))/I3;[4]:=(M34+k34*(x[3]-x[4])-Fk1*r1/(u1*KPD1))/I4;[5]:=(M35+k35*(x[3]-x[5])-Fk2*r2/(u2*KPD2))/I5;x[4]>0 then d2:=1-(x[6]*U1)/(x[4]*R1)d2:=0;d2>1 then d2:=1;d2<0 then d2:=0;:=(l2*M*9.81-ht*x1[6]-0.8*Fkr1-0.8*Fkr2-Mcpr)/(l1+l2);:=(l1*M*9.81-ht*x1[6]-0.8*Fkr1+(l1+l2+0.8)*Fkr2-Mcpr)/(l1+l2);:=f1*Rz1*r1+f2*Rz2*r2;:=Rz1*fmax*(1-exp(-d2*k1));:=Rz2*fmax*(1-exp(-d2*k1));[6]:=(Fk1+Fk2-Ff1-Ff2)/M;;Rks(n:integer; var h,t1,th:extended; var y,yh,z,d:massiv1; a:massiv2);,i:integer;i:=1 to n do:=t1;[i]:=y[i];[i]:=y[i];;j:=1 to 4 do(n,th,d,z);:=t1+a[j];i:=1 to n do[i]:=yh[i]+a[j+1]*z[i]/3;[i]:=y[i]+a[j]*z[i];;;;
TForm1.BitBtn1Click(Sender: TObject);,t1,th,s:extended;,i,g:integer;,x1,xh,z,d:massiv1;:massiv2;:= '.';:=2.5;:=530;:=1500;:=StrToFloat(LabeledEdit1.Text);:=StrToFloat(LabeledEdit2.Text);:=StrToFloat(LabeledEdit3.Text);:=StrToFloat(LabeledEdit4.Text);:=StrToFloat(LabeledEdit5.Text);:=StrToFloat(LabeledEdit6.Text);:=StrToFloat(LabeledEdit7.Text);:=StrToFloat(LabeledEdit8.Text);:=StrToFloat(LabeledEdit9.Text);:=StrToFloat(LabeledEdit10.Text);:=StrToFloat(LabeledEdit11.Text);:=StrToFloat(LabeledEdit12.Text);:=StrToFloat(LabeledEdit13.Text);:=StrToFloat(LabeledEdit14.Text);:=StrToFloat(LabeledEdit15.Text);:=StrToFloat(LabeledEdit16.Text);:=StrToFloat(LabeledEdit17.Text);:=StrToFloat(LabeledEdit18.Text);:=StrToFloat(LabeledEdit19.Text);:=StrToFloat(LabeledEdit20.Text);:=StrToFloat(LabeledEdit21.Text);:=StrToFloat(LabeledEdit22.Text);:=StrToFloat(LabeledEdit23.Text);:=cos(30)*Fkr;:=cos(60)*Fkr;:=3.5;:=4.3;:=5.2;:=5.4;:=0.82;:=0.9;:=61.45;:=30.73;:=0.05;//целина:=f1;:=0;:=0;:=10;:=6;:=0.001;[1]:=h/2;[2]:=a[1];[3]:=h;[4]:=h;[5]:=a[1];[1]:=wmax;[2]:=0;[3]:=0;[4]:=0;[5]:=0;[6]:=0;.Series1.Clear;.Series2.Clear;.Series3.Clear;.Series4.Clear;.Series5.Clear;.Series2.Title:='Mдвиг';.Series3.Title:='Mфрик';.Series4.Title:='w1';.Series5.Title:='w2';(Fw,'Data.rez');(Fw);:=0;:=g+1;(n,h,t1,th,x,xh,z,d,a);x1[5]<0 then x1[5]:=0;x[6]<0 then x[6]:=0;x[2]<0 then x[2]:=0;x[5]<0 then x[5]:=0;x[4]<0 then x[4]:=0;[6]:=x[6]*60;.Series1.AddXY(t1,x[6]);.Series2.AddXY(t1,Mdv);.Series3.AddXY(t1,Mf);.Series4.AddXY(t1,x[1]);.Series5.AddXY(t1,x[2]);.Series6.AddXY(t1,x[1]);.LineSeries1.AddXY(t1,x[2]);.LineSeries2.AddXY(t1,x[3]);.LineSeries3.AddXY(t1,x[4]);.LineSeries4.AddXY(t1,x[5]);.StringGrid1.Cells[0,g]:=FloatToStrf(t1,fffixed,7,4);.StringGrid1.Cells[1,g]:=FloatToStrf(Mdv,fffixed,7,3);.StringGrid1.Cells[2,g]:=FloatToStrf(Mf,fffixed,7,3);.StringGrid1.Cells[3,g]:=FloatToStrf(x[1],fffixed,7,3);.StringGrid1.Cells[4,g]:=FloatToStrf(x[2],fffixed,7,3);.StringGrid1.Cells[5,g]:=FloatToStrf(x[3],fffixed,7,3);.StringGrid1.Cells[6,g]:=FloatToStrf(x[4],fffixed,7,3);.StringGrid1.Cells[7,g]:=FloatToStrf(x[5],fffixed,7,3);.StringGrid1.Cells[8,g]:=FloatToStrf(x[6],fffixed,7,3);.StringGrid1.Cells[9,g]:=FloatToStrf(Fk1,fffixed,7,3);.StringGrid1.Cells[10,g]:=FloatToStrf(Fk2,fffixed,7,3);.StringGrid1.Cells[11,g]:=FloatToStrf(x[6]*t1/2,fffixed,7,3);(Fw,Mdv:7:4,' ',Mf:7:3,' ',x[1]:7:3,' ',x[2]:7:3,' ',[3]:7:3,' ',x[4]:7:3,' ',x[5]:7:3,' ',x[6]:7:3,' ',:7:3,' ',Fk2:7:3,' ',x[6]*t1:7:3);.StringGrid1.RowCount:=g+1;i:=1 to n do[i]:=xh[i];:=th;(t1>=tmax);
Form2.Label1.Caption:='Максимальная скорость машины:';
Form2.Label2.Caption:=Form2.StringGrid1.Cells[8,g]+' км/ч';.ShowModal;;TForm1.BitBtn2Click(Sender: TObject);
begin;;.
.Исходные данные для моделирования:
Моменты инерции: I1=48.54 кг·м2; I2=27.4 кг·м2; I3=104.3 кг·м2;I4=41,3 кг·м2;I5=78,4 кг·м2
Податливость: e23=3·10-31/Н*м2;
Характеристика двигателя: ωdv0=104.7 об/с; ωmax=167.5 об/с; ωdvn=230.4 об/с; Mdv0=370Н·м; Mdvmax=440Н·м;
Радиусы колес: R1=0,6м R2=0.8 м;
Масса машины: М= 4730 кг;
Габаритные размеры (относительно центра тяжести):=2.2 м; l2=2,4 м; h=1.5 м.
Сцепление колес с дорогой: fc1 = 0.67;
Коэффициент буксования: k2 = 6.8;
Коэффициенты полезного действия: КПД1 = 0.82;КПД2=0.9.
Шаг по времени: h = 0.001 c.
Коэффициент сопротивления качению: fc =0.1;
Коэффициент запаса сцепления: β =2;
Передаточные
отношения: u1=61.45; u2=30.73
9.Результаты расчета и их анализ
Согласно ГОСТ 22576-90 максимальную скорость
определяют на передаче, обеспечивающей достижение наибольшей устойчивой
скорости движения. Математическая модель трогания и разгона исследуемой машины
позволила определить по заданным условиям скорость МТЗ-1025.4, которая достигла
10.796 км/ч за 10 с. (рисунок 6).
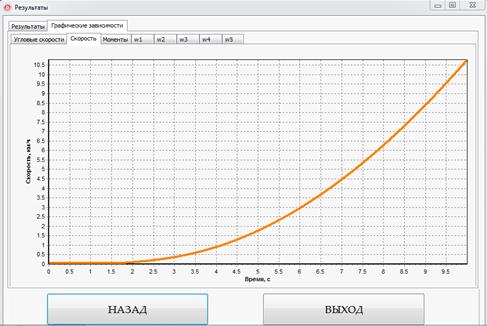
Рисунок 6.1 - График изменения скорости при трогании и разгоне
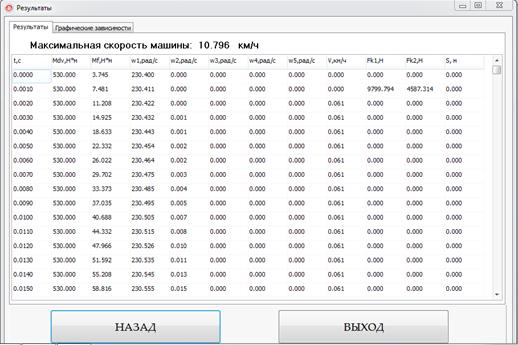
Рисунок 6.2 - Результат вычислений ЭВМ
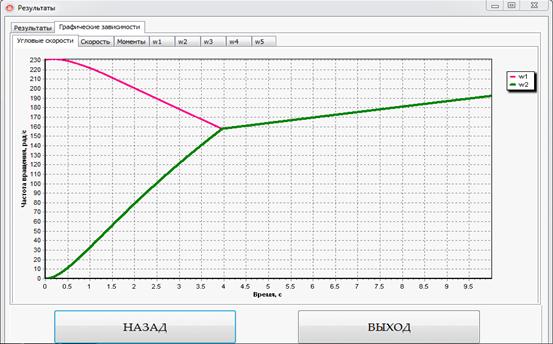
Рисунок 6.3 - График изменения угловой скорости
коленвала двигателя и первичного вала КП
Из графика видно, что замыкание сцепления начинается через 4,15 секунды с начала старта, т. е. начинается второй период разгона.
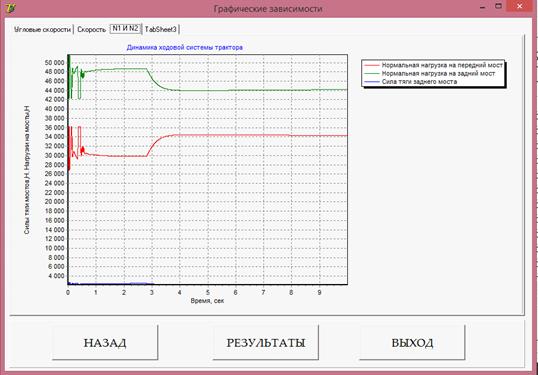
Рисунок 6.4 -Динамика ходовой системы трактора
Из графиков динамики ходовой системы трактора, которые показаны на рисунке 6.4 видно, что нормальная нагрузка на передний мост и нормальная нагрузка на задний мост после выхода трактора на установившийся режим протекают по линейному закону.
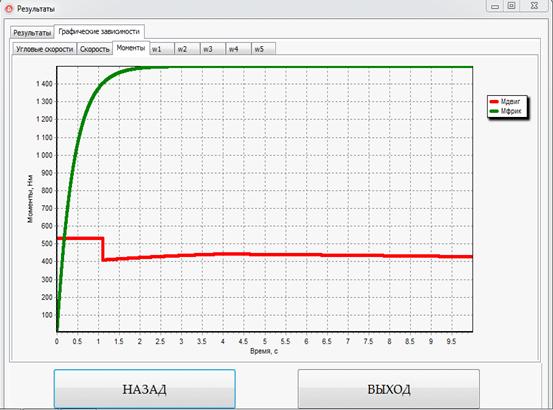
Рисунок 6.4 -График момента сцепления и момента
двигателя
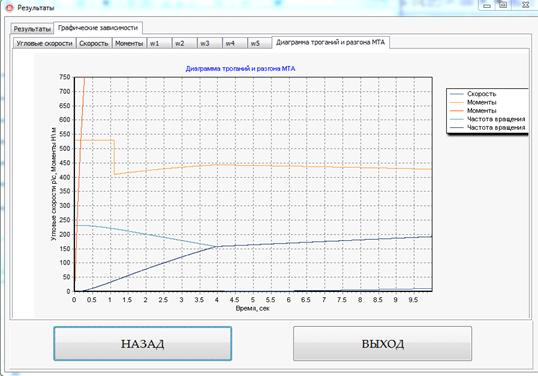
Рисунок 6.5 -Диаграмма троганий и разгона МТА
10.Исследование характеристик модели
Полученная модель имеет достаточную точность для приближенного исследования, однако значительное количество упрощений не позволяют говорить о высокой точности модели. С учетом этого следует отметить незначительные затраты времени на расчет с использованием данной модели.
Источником погрешностей данной математической
модели являются:неточность входных данных, приближенный характер используемых
вычислительных методов, округление при арифметических операциях.
Заключение
)Произведем проверку математической модели на устойчивость, т.е. на степень нечувствительности мат. модели к изменению входных параметров. Так, к примеру при изменении некоторых значений моментов инерции, и принятого радиуса колеса, модель остается работоспособной. Не влияет на работоспособность модели и изменение иных входных параметров, что говорит о ее устойчивости.
) С использованием системы топливоподачи
CommonRailудалось добиться повышения крутящего момента двигателя. Атак же
уменьшить удельный расход топлива в 1.5 раза.
Список использованных источников
Тракторы: Теория: Учебник для студентов вузов по спец. «Автомобили и тракторы» / В.В. Гуськов, Н.В. Велев, Ю.Е. Атаманов и др.;-М.: Машиностроение, 1988. - 376с.
Моделирование характеристик дизельного двигателя. Атаманов Ю.А. Плищ В.Н. Поварехо А.С.
Анилович, В. Я. Конструирование и расчет сельскохозяйственных тракторов/ В.Я. Анилович, Ю.Т. Володажченко. - 2-ое изд., переработ. и доп. М.: «Машиностроение», 1976. - 456 с.
Математическое моделирование: Методические указания по выполнению практических и курсовых робот для студентов специальностей 1-37 01 04 «Многоцелевые гусеничные и колесные машины», 1-37 01 03 «Тракторостроение», 1-37 01 05 «Городской электрический транспорт»/ В.П.Бойков, Г.П.Грибко, А.С.Поварехо, А.И.Рахлей; БНТУ. Минск., 2009.-104с.
ГОСТ 22576-90. Автотранспортные средства. Скоростные свойства. Методы испытаний.
Методические указания к лабораторным работам по курсу «Математическое моделирование» для студентов специальностей I-37.01.03 «Тракторостроение», I-37.01.04 «Многоцелевые гусеничные и колесные машины», I-37.01.05 «Городской электрический транспорт»/БНТУ. Минск., 2004.-37с.
ГОСТ 19.701-90. Схемы алгоритмов, программ, данных и систем. Обозначения условные и правила выполнения.
Барский, И.Б. Конструирование и расчёт тракторов / И.Б. Барский, В.Я. Анилович, Г.М. Кутьков. - М.: «Машиностроение», 1973. - 280 с
Яблонский, А.А. Курс теоретической механики / Л. М. Матюшина, В. З. Казакевич, М. И. Козлова. - Москва: «Высшая школа»,1966. - 411с.