Материал: Лекция 9
![]() ,
,
где ЭДС E1 и ток I1 имеют частоту ƒ1;

где ЭДС E2S и ток I2S имеют частоту ƒ2.
Поделив в последнем выражении числитель и знаменатель на величину скольжения S, получим условный ток I2 ротора, изменяющийся, как и ЭДС E2 = E2S/S, с частотой ƒ1, т.е.
![]()
Этому уравнению соответствует схема замещения заторможенного ротора (рис. 7.6в), параметры которой приведены к числу витков статорной обмотки:

где n = E1/E2 = (k01w1)/(k02w2) – коэффициент трансформации АД.
 7.3.2.
Полная схема замещения фазы АД.
На
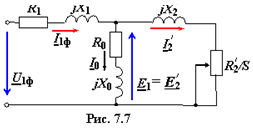
рис. 7.7 изображена схема замещения одной
фазы АД, на которой элементы R0
и Х0
− соответственно активное и реактивное
сопротивления ветви намагничивания.
Схема замещения позволяет проанализировать
работу АД в различных режимах по известным
его параметрам. Для этой цели составляют
систему уравнений по первому и второму
законам Кирхгофа,
решив которую, можно аналитически
определить неизвестные величины.
7.3.2.
Полная схема замещения фазы АД.
На
рис. 7.7 изображена схема замещения одной
фазы АД, на которой элементы R0
и Х0
− соответственно активное и реактивное
сопротивления ветви намагничивания.
Схема замещения позволяет проанализировать
работу АД в различных режимах по известным
его параметрам. Для этой цели составляют
систему уравнений по первому и второму
законам Кирхгофа,
решив которую, можно аналитически
определить неизвестные величины.
Итак, для схемы замещения (см. рис. 7.7) можно записать:
− уравнение токов, причём ток ХХ I0 АД составляет (20-40) % от номинального тока статора:

− уравнение электрического равновесия для фазы статора:
![]()
− уравнение электрического состояния для фазы ротора:


7.3.3.
Векторная диаграмма схемы замещения
фазы АД.
В
приведенные выше уравнения входят
величины ЭДС, напряжений, токов, полных
сопротивлений в комплексной форме.
Используя схему замещения фазы АД (рис.
7.7) и приведённые уравнения, строят
векторную диаграмму (рис.
7.8), которая позволяет наглядно увидеть
соотношения и углы сдвига фаз между
электрическими величинами. Суммируя
напряжения на индуктивном сопротивлении
Х1
и
на активном R1
обмотки статора с ЭДС -Е1,
получают вектор фазного нап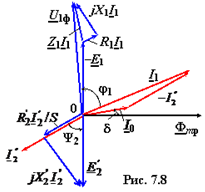 ряжения
U1ф.
ряжения
U1ф.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При пуске АД падения напряжений в обмотке статора возрастают в 4–7 раз, вследствие чего ЭДС Е1 будет примерно на 40–50% меньше U1ф.
Угол сдвига фаз φ1 < π/2, так как двигатель потребляет активную и реактивную мощности со стороны статора. Через вал ротора двигатель отдаёт полезную механическую мощность в нагрузку.
7.4. Электромагнитный момент, механическая и рабочие характеристики ад
7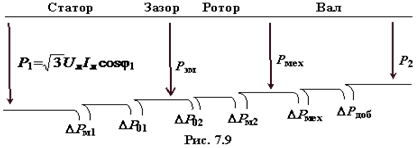 .4.1.
Потери мощности в двигателе.
Для
анализа потерь энергии (активной
мощности) в АД, при преобразовании
отбираемой из сети электрической энергии
в полезную механическую на валу,
строят
энергетическую диаграмму (рис.
7.9).
.4.1.
Потери мощности в двигателе.
Для
анализа потерь энергии (активной
мощности) в АД, при преобразовании
отбираемой из сети электрической энергии
в полезную механическую на валу,
строят
энергетическую диаграмму (рис.
7.9).
При этом электрическая мощность, потребляемая АД из сети,

частично расходуется на потери в стали DP01 статора (от вихревых токов и явления гистерезиса) и на тепловые потери в меди DPм1 = 3R1(I1ф)2 (в обмотках статора), оставшаяся часть мощности передаётся ротору посредством электромагнитного поля:
Pэм = P1 - DP01 - DPм1.
В свою очередь, электромагнитная мощность Рэм частично расходуется на потери в меди DPм2 = 3R2(I2S)2 ротора (потери в стали ΔP02 ротора незначительные вследствие низкой частоты тока I2), оставшаяся часть мощности преобразуется в механическую мощность Рмех двигателя (см. рис. 7.9).
Полезную мощность на валу двигателя Р2 получим, если из механической мощности вычтем механические потери ΔРмех (потери в подшипниках, вентиляционные) и добавочные потери ΔРдоб (пульсационные).
7.4.2. Электромагнитный момент ад. Электромагнитный момент, развиваемый ротором, определяется основным магнитным потоком Фmр ад и током i2 ротора:
М = CМФmpI2cosΨ2,
где CМ − коэффициент, определяемый конструктивными особенностями АД; Ψ2 − угол сдвига фаз между ЭДС Е2 и током I2 ротора.
Однако для практического использования эта формула мало пригодна. Из курса механики известна зависимость между вращающим моментом М и полезной мощностью Р2 на валу двигателя: M = P2/ω2, где ω2 = 2πn2/ 60 – угловая частота вращения ротора.
Пренебрегая потерями в стали DP02 ротора (см. рис. 7.9), запишем DPм2 = Pэм - Рмех.
Учитывая, что Pэм = Mω1 и Рмех = Mω2, определим потери в меди ротора, т.е.
DPм2 = 3R2(I2)2 = 3R2’(I2’)2 = M(ω1- ω2).
Умножив и разделив правую часть уравнения на ω1, получим
 Обращаясь
к схеме замещения (см. рис. 7.7)
и
пренебрегая поперечной ветвью
намагничивания, имеем:
Обращаясь
к схеме замещения (см. рис. 7.7)
и
пренебрегая поперечной ветвью
намагничивания, имеем:

т.е. момент вращения АД пропорционален квадрату фазного напряжения сети и является функцией скольжения S.
Пусковой момент (S = 1, см. рис. 7.10)
Отношение пускового момента к номинальному моменту β = Mп/Mн = 0,9-1,3, а соответствующих токов α = Iп/Iн = 4-7.
 Критическое
скольжение,
при котором М
= Мmах
Критическое
скольжение,
при котором М
= Мmах
 При
этом
При
этом
Отношение максимального момента к номинальному моменту λ = Mmax/Mн = 1,9-2,5.
 Для
построения графика М
= f(S)
при
0
≤ S
≤ Sкр
удобна
формула
Клосса:
Для
построения графика М
= f(S)
при
0
≤ S
≤ Sкр
удобна
формула
Клосса:
Используя каталожные данные АД P1н, n2н, U1н, hн, соsjн, a и l, определяют номинальный момент Mн, номинальную мощность Р1н и номинальный ток I1н, потребляемые из сети, по следующим формулам:

7.4.3. Механическая характеристика двигателя. Наибольшее значение для оценки свойств АД имеет графическую зависимость частоты вращения ротора n2 от вращающего момента M, т.е. n2 = ƒ(M).
При выборе двигателя к производственному механизму из множества двигателей с различными характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма.
Механическую характеристику n2 = ƒ(M) получают посредством преобразования зависимости M = ƒ(S), график которой представлен на рис. 7.10.
З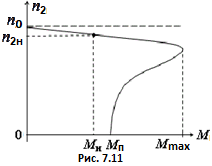 адаваясь
значениями скольжения S
и
пользуясь формулой:
адаваясь
значениями скольжения S
и
пользуясь формулой:
n2 = n1(1 – S) = 60ƒ1(1 – S)/p,
при известных параметрах двигателя можно определить момент М и построить искомую механическую характеристику (рис. 7.11). Двигатель развивает максимальный вращающий момент при частоте n2 ≈ (0,8-0,9)n1; при частоте вращения
n2
= n1
момент
равен нулю, а при
n2
= 0 пусковой
момент
Мп = (0,3-0,7)Мmax.
7.4.4. Рабочие характеристики двигателя. Эксплуатационные свойства асинхронного двигателя можно оценить по рабочим характеристикам, которые изображаются кривыми, выражающими графические зависимости от полезной мощности Р2 величин: тока I1 в обмотке статора, КПД h, скольжения S, коэффициента мощности cosφ, полезного момента M на валу АД при U1 = const и f1 = = const (рис. 7.12). Их определяют экспериментально или путём расчёта, используя схему замещения АД.
При
холостом ходе P2
= 0,
токи обмоток статора I0,
создающие в. м. п., довольно велики и составляют 30-50%
номинальных токов I1н.
Вследствие потерь в магнитопроводе и
вентиляционных потерь у двигателя
при холостом ходе cosφ
= 0,1-0,2,
а частота вращения ротора
составляют 30-50%
номинальных токов I1н.
Вследствие потерь в магнитопроводе и
вентиляционных потерь у двигателя
при холостом ходе cosφ
= 0,1-0,2,
а частота вращения ротора
n2х = (0,995-0,998)n1.
 По
мере роста нагрузки на валу ток статора
увеличивается, как и активные мощности
P2
и
P1.
В свою очередь, увеличивается коэффициент
мощности.
По
мере роста нагрузки на валу ток статора
увеличивается, как и активные мощности
P2
и
P1.
В свою очередь, увеличивается коэффициент
мощности.
При этом скольжение S увеличивается, а частота вращения вала n2 уменьшается, поскольку это единственная причина увеличения тока и момента М. При нагрузках, близких к номинальной, рост КПД h замедляется; более того, он может несколько падать вследствие увеличения потерь в обмотках двигателя.
При номинальной нагрузке КПД АД мощностью 3-100 кВт η = 0,8-0,93, а cosφн = 0,7-0,9.