Материал: Лекция 9
Тема 7 асинхронные двигатели
В теме 7 рассмотрено: назначение, устройство и принцип действия асинхронных двигателей (АД), схемы замещения фаз статора и ротора двигателей, их механические и рабочие характеристики. Изложены способы пуска в ход и регулирования частоты вращения АД.
Установочная лекция 9 (2 ч)
Дидактические единицы:
7.1. Назначение, устройство и принцип действия АД.
7.2. Скольжение и частота вращения ротора АД.
7.3. Схема замещения АД и ее векторная диаграмма.
7.4. Электромагнитный момент, механическая и рабочие характеристики АД.
7.5. Пуск в ход и регулирование частоты вращения АД.
Содержание
7.1. Назначение, устройство и принцип действия ад
Асинхронные электрические двигатели ¾ это машины переменного тока, у которых частота вращающегося магнитного поля статора и частота вращения ротора не совпадают.
Асинхронные двигатели (АД) преобразуют электрическую энергию в механическую и являются потребителями электрической энергии (рис. 7.1а). Первый асинхронный двигатель был сконструирован в 1889 г. русским инженером М. О. Доливо-Добровольским.
Асинхронные трёхфазные двигатели ¾ самые распространённые из всех видов электрических машин. Это объясняется тем, что они просты по конструкции, дёшевы, надежны в работе, имеют высокий КПД при номинальной нагрузке, выдерживают значительные перегрузки, не требуют сложных пусковых приспособлений.
Наряду с преимуществами АД имеют ряд недостатков, основными из которых являются: низкий коэффициент мощности (соsφ0) при неполной нагрузке (при ХХ соsφ0 = 0,2-0,3), большой пусковой ток, низкий КПД при малых нагрузках, относительная сложность и неэкономичность регулирования их эксплуатационных характеристик и, в первую очередь, механических характеристик.
Асинхронные двигатели с короткозамкнутым (КЗ) (серии АК, рис. 7.1б) и с фазным (серии АО, рис. 7.1в) роторами разрабатывались и выпускались в нашей стране в виде единых серий: А, АО (1949-1951 годы), А2, АО2 мощностью 0,6-100 кВт (1958-1960 годы), А, АК (100-1000 кВт, 1952-1956 годы), А2, АК2 (100-1000 кВт, 1964-1965 годы), А3, АО3 (132-500 кВт), 4А и АИ (АИР) (0,06-400 кВт до настоящего времени).
В последние годы в России освоен выпуск новых серий асинхронных двигателей: RА (0,37...100 кВт), 5А (0,37...400 кВт) и 6А. Выпускаются также АД большой мощности с КЗ ротором серий АТД4, А4, ДА и др. (500...8000 кВт) на напряжения 6 кВ и 10 кВ и синхронные частоты n1 вращения 1500, 750, 600 и 500 об/мин, и с фазным ротором серий АОК2, АОК (200...500 кВт), АКСБ (600...1000 кВт), ВАК3 (1600 и 3400 кВт, n1 = 1000 об/мин) на напряжение 6 кВ, и микродвигатели серий АИР, УАД, 5АЕУ и др. мощностью до 600 Вт.
7.1.1. Устройство АД. Основными частями АД являются статор (неподвижная часть машины) и ротор (подвижная часть), отделённые друг от друга воздушным зазором (0,3-0,5 мм и до 1,5-2 мм у высоковольтных машин большой мощности). Их сердечники собраны из листов электротехнической стали. На внутренней части поверхности статора и на внешней ротора выштампованы пазы, в которые уложены обмотки. Сердечник статора помещен в корпус, который является внешней частью двигателя. Сердечник ротора укреплён непосредственно на валу двигателя или на ступице, надетой на вал. Обмотка статора обычно выполняется трёхфазной, состоящей из трёх самостоятельных катушек, сдвинутых в пространстве одна относительно другой на 120° (рис. 7.2). Обмотка статора обычно выполняется трёхфазной, состоящей из трёх самостоятельных катушек, сдвинутых в пространстве одна относительно другой на 120° (рис. 7.2).
 В
двигателях низкого напряжения (до 1000
В)
концы каждой фазы обмотки статора
присоединены к клеммам,
которые расположены на
щитке,
укреплённом на корпусе двигателя, и
обозначены соответственно: С1−С4
(фаза
А),
С2−С5
(фаза
В)
и С3−С6
(фаза
С)
(рис. 7.3). Это даёт возможность в зависимости
от величины напряжения сети (например,
380 или 220 В) соединять
обмотку статора звездой (рис.
7.3а)
или треугольником
(рис. 7.3б)
для того, чтобы в обоих случаях фазное
напряжение обмотки было номинальным
(в данном примере равным 220 В).
В
двигателях низкого напряжения (до 1000
В)
концы каждой фазы обмотки статора
присоединены к клеммам,
которые расположены на
щитке,
укреплённом на корпусе двигателя, и
обозначены соответственно: С1−С4
(фаза
А),
С2−С5
(фаза
В)
и С3−С6
(фаза
С)
(рис. 7.3). Это даёт возможность в зависимости
от величины напряжения сети (например,
380 или 220 В) соединять
обмотку статора звездой (рис.
7.3а)
или треугольником
(рис. 7.3б)
для того, чтобы в обоих случаях фазное
напряжение обмотки было номинальным
(в данном примере равным 220 В).
7.1.2. Вращающееся магнитное поле (в. м. п.) статора. При подключении двигателя к трехфазной сети в обмотках статора протекают токи ia, ib и ic (рис. 7.4а). МДС каждой обмотки создаёт магнитный поток, вектор которого совпадает с осью соответствующей катушки. Если ток ia = Im, то ток ib = ic = Im/2 (при t = t1, рис. 7.4а).
При этом вектор результирующего магнитного потока Фmp = Фma + Фmb + Фmc совпадает с осью катушки С1 − С4 (фаза А) (рис. 7.4б). В моменты времени t = t2 и t = t3 (см. рис. 7.4a) результирующий вектор Фmp будет совпадать с осями катушек соответственно С2 − С5 (фаза В) и С3 − С6 (фаза С) (рис. 7.4в). Очевидно, что за один период Т изменения напряжения сети (см. рис. 7.4а) вектор Фmp результирующего магнитного поля сделает один оборот.
Таким образом, МДС трёх обмоток статора, расположенных в пространстве под углом 120° друг к другу, при подключении их к трёхфазной сети синусоидального тока создают в. м. п., аналогичное по форме магнитному полю вращающегося двухполюсного магнита (с одной парой р полюсов) с подобным распределением магнитной индукции на полюсах.
В общем случае частота вращения n1 в. м. п. (называемая синхронной частотой вращения в. м. п. статора) зависит от частоты напряжения сети f1 и числа пар р полюсов, определяемого числом катушек статора, т.е.

7.1.4. Принцип действия ад основан на взаимодействии в. М. П. Статора с токами, индуктируемыми вращающимся полем статора в проводниках ротора.
Согласно закону электромагнитной индукции в. м. п. индуктирует ЭДС E1 и E2 в обмотках статора и ротора, а так как обмотки ротора замкнуты, то в них протекают токи I2, значения которых зависят от нагрузки.
Согласно закону Ампера в результате взаимодействия в. м. п. статора с токами I2 роторных обмоток на валу АД возникает вращающий электромагнитный момент

где F = NBl I – механическая сила в ньютонах (Н), направление которой определяют по известному правилу левой руки; B – магнитная индукция, Тл; l – длина активного проводника ротора, пересекаемого магнитными силовыми линиями, м; N – число проводников ротора; I – ток в проводнике длиной l, А; d – диаметр ротора, м.
Так же, как в трансформаторе, имеет место воздействие тока I2 ротора и его МДС w2I2 на ток I1 статора и на результирующий магнитный поток Фmp. Если вращающий момент М больше момента сопротивления Мс на валу (M > Мс), то ротор начинает вращаться в направлении вращения в. м. п. Однако частота вращения ротора не может достигнуть частоты вращения магнитного поля статора. Если бы частота вращения ротора n2 была бы равна частоте n1, т.е. n2 = n1, то стержни обмотки ротора не пересекали бы магнитные силовые линии в. м. п., в них не индуктировалась бы ЭДС Е2, не было бы тока I2 и вращающего момента М.
Таким образом, в АД n2 < n1, поэтому такие машины называют асинхронными.
7.2. Скольжение и частота вращения ад
Степень отставания частоты вращения ротора n2 от частоты вращения магнитного поля n1 статора оценивается скольжением S, равным

Диапазон изменения скольжения в АД: 1 ≥ S ≥ 0. При пуске n2 = 0, S = 1; при холостом ходе S = 0,001-0,005; при номинальной нагрузке S = 0,03-0,07.
Частота вращения ротора выражается через скольжение, т.е.
![]()
Отсюда следует, что регулировать частоту вращения ротора n2 можно изменением частоты ƒ1, числа пар полюсов p и скольжением S.
Так как число пар полюсов р натурального ряда (р = 1, 2, 3, 4 и т.д.), то при f1 = 50 Гц возможны следующие значения n1: 3000, 1500, 1000, 750 об/мин и т.д., т.е. для двухполюсной машины (при трёх статорных катушках р = 1) n1 = 60f1 = 3000 об/мин; для четырёхполюсной машины (при шести статорных катушках р = 2) n1 = 60f1/р = 60×50/2 = 1500 об/мин и т.д.
7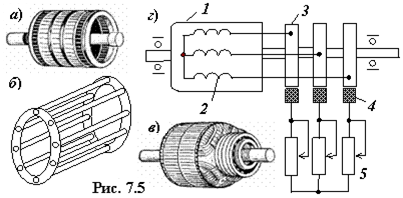 .1.3.
Устройство обмоток роторов АД.
Обмотка
ротора может быть выполнена
короткозамкнутой (КЗ)
или фазной. КЗ
обмотка
ротора (рис. 7.5а)
выполняется в виде беличьей
клетки,
состоящей из алюминиевых или медных
(латунных) стержней и замыкающих их на
торцах колец
(рис. 7.5б).
У АД с фазным
ротором (рис.
7.5в)
одни концы обмоток 2
ротора соединяются с контактными
кольцами 3,
расположенными на валу двигателя,
а другие соединены в общую точку
(рис. 7.5г).
Контактные латунные кольца
3
соединяются с
клеммами
пускового реостата 5
с
помощью угольных или меднографитовых
щёток
4
и щёткодержателей.
.1.3.
Устройство обмоток роторов АД.
Обмотка
ротора может быть выполнена
короткозамкнутой (КЗ)
или фазной. КЗ
обмотка
ротора (рис. 7.5а)
выполняется в виде беличьей
клетки,
состоящей из алюминиевых или медных
(латунных) стержней и замыкающих их на
торцах колец
(рис. 7.5б).
У АД с фазным
ротором (рис.
7.5в)
одни концы обмоток 2
ротора соединяются с контактными
кольцами 3,
расположенными на валу двигателя,
а другие соединены в общую точку
(рис. 7.5г).
Контактные латунные кольца
3
соединяются с
клеммами
пускового реостата 5
с
помощью угольных или меднографитовых
щёток
4
и щёткодержателей.
Фазные ЭДС, которые индуктируются в обмотках статора,

где k01 ≈ 0.93-0.97 – обмоточный коэффициент катушки статора.
Фазные ЭДС вращающегося ротора

где k02 ≈ 0.93-0.97 – обмоточный коэффициент роторной обмотки.
Относительная частота (частота пересечения в. м. п. статора вращающегося ротора) n1 – n2 = n1S, где n1 = 60f1/p и f1 = n1p/60 – частота ЭДС статорной обмотки. Тогда частота ЭДС роторной обмотки

Диапазон изменения частоты в роторе АД f2 ≈ (0–1)f1; номинальная частота ЭДС и тока роторной обмотки
f2н ≈ (0,01-0,07)f1 = 0,5-3,5 Гц.
Таким образом, частота ЭДС в обмотке ротора прямо пропорциональна скольжению и равна частоте ЭДС статора только при неподвижном роторе.
7.3. Полна схема замещения фазы ад и ее векторная диаграмма
7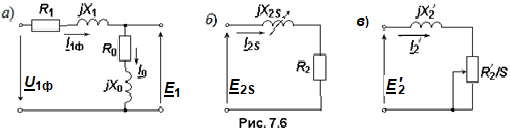 .3.1.
Схемы замещения фазы статора и фазы
ротора АД.
Для
анализа работы АД часто пользуются
схемой замещения двигателя, аналогичной
схеме замещения трансформатора. При её
построении необходимо учесть ряд
особенностей, прежде всего то
обстоятельство, что
частота ЭДС и тока ротора не равна
частоте ЭДС и тока статора.
.3.1.
Схемы замещения фазы статора и фазы
ротора АД.
Для
анализа работы АД часто пользуются
схемой замещения двигателя, аналогичной
схеме замещения трансформатора. При её
построении необходимо учесть ряд
особенностей, прежде всего то
обстоятельство, что
частота ЭДС и тока ротора не равна
частоте ЭДС и тока статора.
Сопротивления обмоток статора и ротора содержат как активную, так и реактивную составляющие. Комплекс полного сопротивления фазы статора (рис. 7.6а)

Комплекс полного сопротивления фазы вращающегося ротора
Т![]() ак
как угловая частота ω2
= ω1S
(ƒ2
= ƒ1S),
то индуктивное сопротивление фазы
ротора переменное (рис. 7.6б),
зависящее от частоты ƒ2,
т.е.
ак
как угловая частота ω2
= ω1S
(ƒ2
= ƒ1S),
то индуктивное сопротивление фазы
ротора переменное (рис. 7.6б),
зависящее от частоты ƒ2,
т.е.
X2S = ω2L2 = ω1L2S = X2S,
где X2 = ω1L2 = X2S/S – индуктивное сопротивление заторможенного ротора; X2S = X2S – индуктивное сопротивление вращающегося ротора.
Запишем уравнения электрического состояния (равновесия) для обмотки статора и обмотки ротора (рис. 7.6а и рис. 7.6в):