Материал: Лекция 35 Регулирование скорости ДПТ. ч2
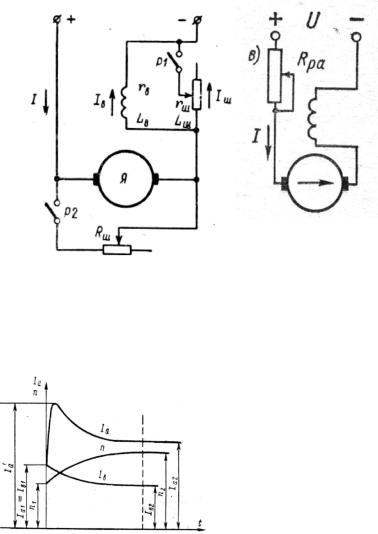
Рис. 5.22. Схема регулирования скоростивращения двигателя последовательноговозбуждения
Рис. 5.23. Схема регулирования скорости вращения двигателя последовательного возбуждения включением сопротивления в
цепь якоря
Если пренебречь небольшим падением напряжения в цепи якоря, то уравнение ЭДС напишется в виде U =Ce n; отсюда видно,
что при увеличении n поток будет уменьшаться и, следовательно, будет уменьшаться ток Iв ; это повлечет за собою
уменьшение тока в шунте Iш (закон разветвленных цепей) и тока в якоре Ia Iв Iш (рис. 5.24). Этот процесс параллельного изменения скорости n и токов Iв и Ia продолжается до
тех пор, пока ток в якоре и поток возбуждения не приобретут таких значений Ia2 и 2 , при
которых M Cм 2Ia2 = Cм 1Ia1 Mc . При этом МJ 0 , и двига-
тель начинает работать в новом установившемся режиме со скоростью
n |
2 |
n |
1 |
(рис. 5.24). Соответственно току I |
a |
2 |
увеличивается подво- |
|
|
||||||||
|
1 |
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
димая |
к |
двигателю мощность P1 UIa2 ; |
|
полезная мощность |
||||
P2 М2 n тоже увеличивается, причем КПД двигателя почти не из-
меняется, а при некоторых соотношениях между различными видами потерь может даже возрасти; в остальном оценка этого способа регулирования последовательного двигателя та же, что и в соответствующем случае двигателя параллельного возбуждения.
Рассматриваемый способ регулирования скорости широко применяется в электротяге. Коэффициент kо.п. называется коэффициентом регулирования. Обычно шунтирующее сопротивление выполняется регулируемым, так чтобы было kо.п. =75%, 61,5% и 50%, но в ряде слу-
чаев поле ослабляют еще сильнее. При работе тягового двигателя на линии приходится считаться с возможностью отрыва токоприемника от контактного провода, когда двигатель некоторое время идет без тока, и последующим включением его в сеть. Если обмотка возбуждения шунтирована только активным сопротивлением, то из-за её значительной индуктивности ток пойдет в первый момент после восстановления контакта с сетью только по шунтирующему сопротивлению. Двигатель не разовьет обратной ЭДС и ток включения может превы-
сить допустимые пределы. Чтобы избежать этого, делают шунтирующее сопротивление индуктивным с таким расчетом, чтобы распределение тока между обмоткой возбуждения и шунтом в переходном процессе приближалось к распределению тока при установившемся режиме.
Изменение магнитного потока в двигателях последовательного возбуждения осуществляется шунтированием обмотки возбуждения с помощью реостата rш (рис. 5.22). Чем меньше сопротивление rш , тем меньше ток возбужде-
ния Iв и магнитный поток и тем больше частота вращения.
Из-за ограничения максимальной скорости в машинах нормального исполнения диапазон регулирования частоты вращения путем изменения магнитного потока составляют (1,5..2,5):1. Регулирование частоты вращения изменением магнитного потока является одним из наиболее простых и экономичных способов и поэтому находит широкое применение. Из-за увеличения механических потерь при увеличении частоты вращения КПД двигателя будет несколько уменьшаться.
Регулирование скорости шунтированием обмотка якоря. При шунтировании обмотки якоря (рис. 5.22) рубильник р1 разомкнут,
рубильник р2 замкнут. Ход рассуждения остается тот же, но разница
та, что в данном случае в ближайший после шунтирования момент времени ток возбуждения остается без изменения, а ток в якоре уменьшается на величину тока, ответвившегося в шунтирующее сопротивление; вследствие этого появляется отрицательный момент ускорения, и двигатель начинает замедлять скорость своего вращения.
По окончании процесса ток в якоре будет меньше первоначального, а ток в обмотке возбуждения и, следовательно, ток, текущий из сети, увеличивается. Соответственно этому возрастает потребляемая
двигателем |
мощность Р1 , тогда как |
его полезная мощность |
Р2 2 nM2 |
уменьшается. Отсюда следует, |
что данный способ регу- |
лирования скорости двигателя последовательного возбуждения весьма неэкономичен. Поэтому он применяется только там, где стоимость электроэнергии не является существенным фактором и где, как, например, в литейных цехах, требуется на короткое время сильно уменьшить скорость двигателя. В некоторых установках скорость по этому способу регулируется в пределах 1:5 и выше.
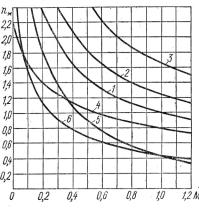
На рис. 5.25 сопоставлены построенные в относительных единицах (Mн 1 и nн 1) механические характеристики последовательно-
го двигателя при различных способах регулирования скорости: кривая 1 – естественная механическая характеристика, кривые 2 и 3 соответствуют коэффициентам ослабления возбуждения Ко.в. 0,6 и
Ко.в. 0,3, кривая 4 соответствует характеристике при шунтированной обмотке якоря, кривая 5 получена при включении сопротивления в цепь якоря, а кривая 6 представляет собой характеристику при U 0,5Uн
Регулирование скорости включением сопротивления в цепь якоря.
(рис. 5.23). Этот способ позволяет регулировать n вниз от номинального значения. Так как одновременно при этом значительно уменьша-
ется КПД, то такой способ регулирования находит ограниченное применение.
Характеристика n f (M) для такого способа регулирования ско-
рости при Rpa* = 0,5 изображена на рис. 5.26 в виде кривой 5.
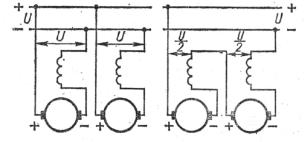
Регулирование скорости изменением напряжения. Этим спосо-
бом можно регулировать n вниз от номинального значения с сохранением высокого КПД. Рассматриваемый способ регулирования широко применяется в транспортных установках, где на каждой ведущей оси устанавливается отдельный двигатель и регулирование осуществляется путем переключения двигателей с параллельного включения в сеть на последовательное (рис. 5.26). На рис. 5.25 кривая 6 представляет собой характеристику n f (M) для этого случая при U 0,5Uн .
Рис. 5.26. Параллельное и последовательное включение двигателей последовательного возбуждения для изменения скорости вращения