Материал: kompyuternaya-model-grebnogo-elektroprivoda-universalnogo-atomnogo-ledokola-proekta-22220
В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк Компьютерная модель гребного электропривода универсального атомного ледокола проекта 22220
1 |
|
|
|
|
|
|
|
|
|
|
|
|
ln1 |
|
|
|
|
+ |
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
416000s |
|
|||
|
|
|
|
|
|
|
|
|
|
Out1 |
||
|
|
|
|
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Transfer Fon 1 |
|
|
|||
2 |
|
|
|
Sum 1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||
ln2
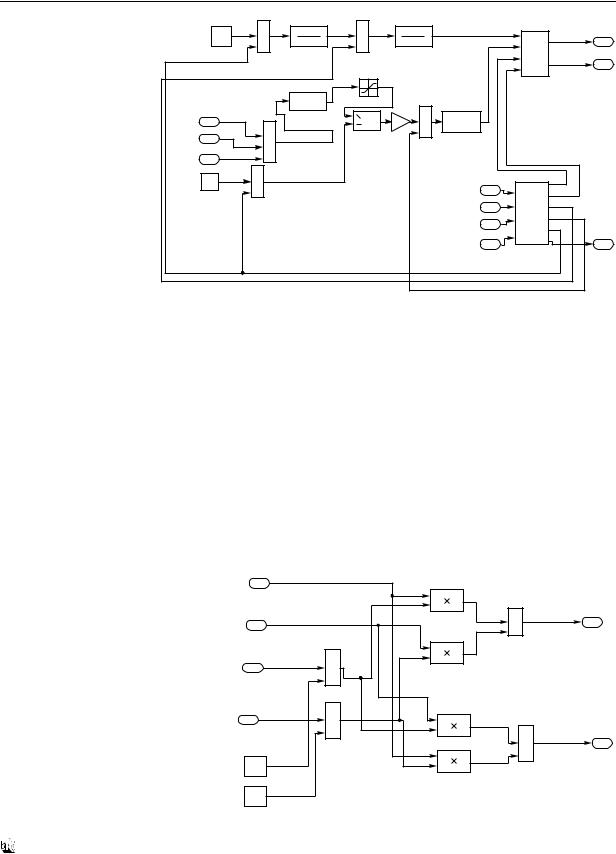
Рис. 5. Схема подсистемы МЧЭЛ
Fig. 5. Layout of MChEL subsystem
Наличие на статоре каждой асинхронной машины двух трехфазных обмоток в субмоделях АД1, АД2 учитывается посредством удвоения величины параметра, устанавливаемой в окне настройки бло-
ка Cain 15.
В СЭД ледокола проекта 22220 в качестве ГЭД используется двигатель типа ГЭД 2х10000-3-165О5. Номинальные параметры последнего и численные значения параметров активных и индуктивных сопротивлений схемы его замещения приведены в табл.
Субсистема МЧЭП компьютерной модели, имитирующая механическую часть гребного ЭП, построена в соответствии со схемой, приведенной на рис. 5. В основе построения схемы лежит уравнение равновесия моментов, действующих на вал ГЭД:
Мэ- Мс = Jр , |
(3) |
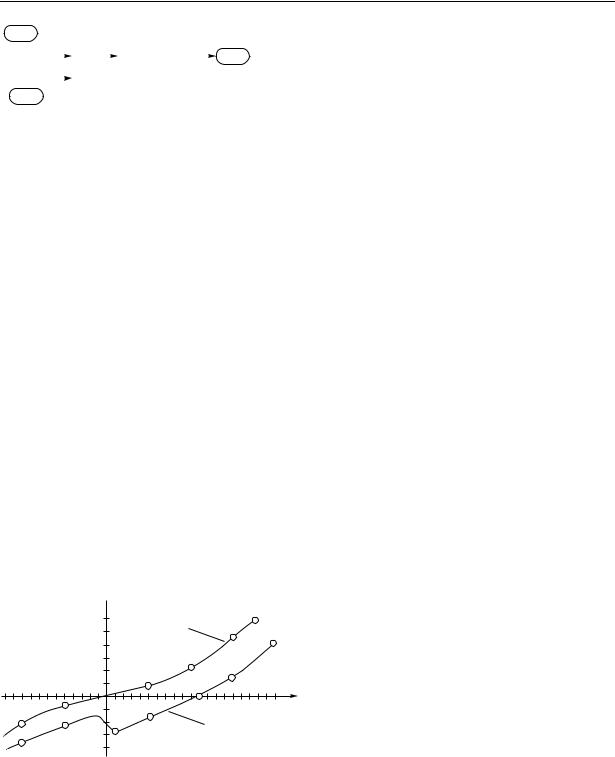
где Мэ – электромагнитный момент, развиваемый ГЭД, Нм; Мс – статический момент нагрузки, приведенный к валу ГЭД, Нм; J – суммарный момент инерции ротора ГЭД, валопровода и гребного винта с присоединенными массами воды, кгм2; ω – частота вращения ротора ГЭД, 1/c; р – оператор Лапласа.
Mс, кНм 
3000
в швартовном режиме
2500
2000
1500
1000
500
–100 |
–500 |
50 |
100 |
150 n, об/мин |
|
–1000 |
|
реверсивная |
|
|
–1500 |
|
||
|
|
в свободной воде |
||
|
–2000 |
|
||
|
|
(V = 23 уз) |
||
|
|
|
||
Рис. 6. Механические характеристики |
|
|||
гребного винта |
|
|
|
|
Fig. 6. Mechanical parameters of propeller |
|
|||
Вышеуказанная субсистема собрана из библиотечных блоков пакета Simulink MatLab (Sum
и Transfer FSN). В окне настройки блока Transfer Fcn1 устанавливается суммарное значение величин момента инерции ротора ГЭД, валопровода и гребного винта с присоединенной массой воды. Для гребного ЭП ледокола проекта 22220 это значение составляет 415000 кгм2. На входы ln1, ln2 субсистемы поступают значения электромагнитного момента Мэ и статического момента нагрузки Мс соответственно. C выхода подсистемы Qut1 снимается значение частоты вращения ω ротора ГЭД.
Величина статического момента нагрузки Мс, действующего на вал ГЭД, зависит от частоты вращения гребного винта и определяется механическими характеристиками последнего. Для ледокола проекта 22220 механические характеристики гребного винта, снятые в швартовном режиме и в режиме хода в свободной воде со скоростью 23 уз, имеют вид, приведенный на рис. 6.
Формирование механических характеристик гребного винта как нелинейных функций, связывающих величину статического момента нагрузки, действующий на винт, с частотой его вращения,
врассматриваемой компьютерной модели реализуется посредством библиотечного блока Look-Up- Table пакета Simulink MatLab. В окне настройки этого блока устанавливаются значения частот вращения гребного винта и значения статического момента нагрузки, берущиеся в соответствии с механическими характеристиками гребного винта.
Как было показано в [1], система управления гребным ЭП ледокола проекта 22220 содержит две подсистемы:
подсистема, посредством которой происходит регулирования частоты вращения ГЭД;
подсистема, которая, действуя совместно с первой подсистемой, обеспечивает регулирование мощности на валу ГЭД.
При этом первая подсистема, построенная в соответствии с алгоритмом векторного управления, содержит два канала:
поддержания постоянства потокосцепления ротора;
регулирования частоты вращения.
Каждый из перечисленных каналов включает
всебя два замкнутых контура (внешний и внутренний), синтезированных по принципу последовательной коррекции.
Функциональные схемы, состав и принцип действия обеих подсистем, образующих систему управления гребным ЭП, подробно изложены в [1].
94 |
Труды Крыловского государственного научного центра, 1(383)/2018 |
V. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak Computer-based model of electric propulsion drive for Project 22220 multi-purpose nuclear icebreaker
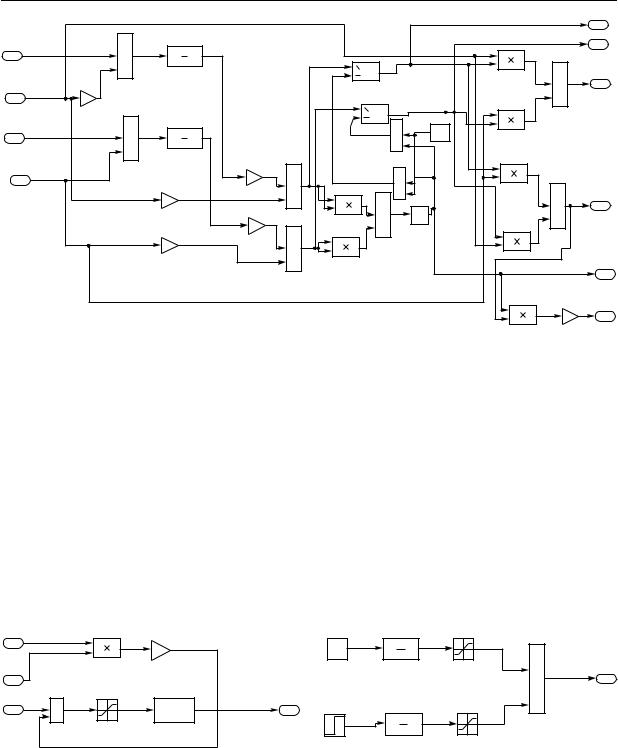
Рис. 7. Схема субсистемы КУЧВ
Fig. 7. Layout
of KUChV subsystem
25.04 |
+ |
s+1 |
+ |
|
s+1 |
|
U1u |
|
U1 |
|
||||
0,002s |
0,002s |
|
U1v |
|
1 |
|||||||||
Constant 1 |
– |
– |
|
|
|
|||||||||
Sum 1 Transfer Fon 1 |
Sum 3 |
Transfer Fon 3 |
cos |
|
|
U1 |
Out1 |
|||||||
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
sin |
|
|
2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Out2 |
|
|
|
|
|
|
|
|
|
|
|
|
БВН |
|
|
|
|
100s+1000 |
Saturation 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,002s |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
Transfer FSN2 |
. |
-K- |
|
+ |
|
100s+1000 |
|
|
|
|
|
|
|
|
. |
|
|
|
0,002s |
|
|
|
|
|
|
||
ln7 |
|
+ |
Product1 Gain1 |
– |
Transfer Fon4 |
|
|
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
||||||
ln1 |
|
+ |
|
|
|
Sum 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2 |
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
ln2 |
|
Sum 1 |
|
|
|
|
|
|
|
|
|
|
|
|
-C- |
+ |
|
|
|
|
|
|
|
U1 |
cos |
cos |
|
||
|
|
|
|
|
|
|
|
|
||||||
S |
+ |
|
|
|
|
|
|
3 |
sin |
|
||||
|
|
|
|
|
|
|
|
|
sin |
|
||||
Constant 2 |
|
|
|
|
|
|
|
ln3 U1 |
|
i1u |
|
|||
Sum 2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
4 |
i |
|
|
lu |
i |
|
|
|
|
|
|
|
|
|
ln4 |
|
1 |
lv |
1v |
|
|
|
|
|
|
|
|
|
|
5 |
i |
1 |
Ym YM |
|
||
|
|
|
|
|
|
|
|
ln5 |
|
м |
Mэ |
|
||
|
|
|
|
|
|
|
|
6 |
|
|
|
3 |
||
|
|
|
|
|
|
|
|
|
|
|
БВНК |
|
||
|
|
|
|
|
|
|
|
ln6 |
|
|
|
|
Out3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Здесь же приводится описание компьютерных моделей этих подсистем.
Схема субсистемы КУЧВ (имитирует подсистему регулирования частоты вращения) компьютерной модели ЭП приведена на рис. 7. В соответствии со схемой субсистема УЧВ содержит набор библиотечных блоков пакета Simulink MatLab (Const, Sum, Saturation, Product, Transfer Fsn), а так-
же два синтезированных блока:
вычисления напряжений (БВН);
вычисленияненаблюдаемыхкоординат(БВНК).
В окнах |
настройки блоков Transfer Fcn 1 |
и Transfer Fcn 3 |
устанавливаются параметры ПИ- |
регуляторов, входящих в состав контуров канала поддержания постоянства потокосцеплпния ротора ГЭД, а в окнах задания блоков Transfer Fsn 2
и Transfer Fsn 4 –параметры ПИ-регуляторов контуров канала регулирования частоты вращения ГЭД. В окне задания блока Saturation 1 устанавливается значение, ограничивающее величину электромагнитного момента, развиваемого ГЭД в режиме заклинивания винта и стоянки под током. На входы ln1, ln2 поступают сигнал задания частоты вращения и сигнал обратной связи по частоте вращения. На вход ln7 приходит сигнал, корректирующий величину частоты вращения в режиме регулирования мощности на валу ГЭД. На выходных зажимах Qut1, Qut2 субсистемы УЧВ формируются фазные напряжения U1α, U1β, поступающие на статорные обмотки ГЭД (субмодели АД1, АД2).
Схема модели блока БВН приведена на рис. 8. Она собрана из библиотечных блоков Sum
Рис. 8. Схема модели блока БВН
Fig. 8. Layout of BVN block model
U1u |
|
|
|
|
|
1 |
|
|
|
|
|
ln1 |
|
|
|
|
|
U1v |
|
Product1 |
+ |
U1 |
1 |
2 |
|
|
– |
|
Out1 |
ln2 |
|
|
|
||
|
|
Sum 3 |
|
|
|
|
|
|
|
|
|
cos |
|
|
|
|
|
3 |
+ |
Product2 |
|
|
|
ln3 |
+ |
|
|
|
|
|
|
|
|
|
|
|
Sum 1 |
|
|
|
|
sin |
|
|
|
|
|
4 |
+ |
|
|
|
|
ln4 |
+ |
|
|
U1 |
|
|
Product3 |
+ |
2 |
||
|
Sum 2 |
|
|||
|
|
|
+ |
|
Out2 |
0,001 |
|
|
Sum 4 |
|
|
Constant 1 |
|
Product4 |
|
|
|
0,001 |
|
|
|
|
|
Constant 2 |
|
|
|
|
|
ФГУП «Крыловский государственный научный центр» |
95 |
В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк |
|
|
|
|
|
|
|
||||
Компьютерная модель гребного электропривода универсального атомного ледокола проекта 22220 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
cos |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
Out1 |
|
|
|
|
|
|
|
|
|
2 |
||
U1 |
+ |
|
1 |
|
|
|
|
|
|
|
|
1 |
|
s |
|
|
|
|
|
|
|
Out2 |
|
ln1 |
|
|
|
|
|
|
|
|
|
|
|
– |
Transfer Fon 1 |
|
. |
|
|
|
|
|
|
||
|
|
|
|
Product5 |
|
i1u |
|
||||
|
Sum 1 |
|
. |
|
|
+ |
3 |
||||
i1 |
|
|
|
Product1 |
|
|
|
||||
|
|
|
|
|
|
|
|
Out3 |
|||
K- |
|
|
|
|
|
|
|
+ |
|
||
2 |
|
|
|
|
|
|
|
|
|
||
ln2 |
Gain1 |
|
|
|
. |
|
|
|
Sum 7 |
|
|
|
|
|
|
|
Constant 1 |
|
|
||||
|
|
|
|
|
. |
|
|
|
|
|
|
U1 |
|
|
1 |
|
Product2 |
0,001 |
Product6 |
|
|
|
|
3 |
+ |
|
s |
|
|
+ |
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|||
ln3 |
– |
Transfer Fon 2 |
|
|
|
|
|
|
|
||
|
|
|
Sum 5 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
i1 |
Sum 2 |
|
|
|
|
|
|
|
|
|
|
|
|
K- |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
+ |
|
|
Product7 |
|
|
|
||
ln4 |
|
|
Gain4 |
|
|
|
|
|
|||
|
|
|
+ |
|
|
|
|
||||
|
|
|
|
|
|
i1v |
|
||||
|
|
K- |
|
+ |
|
|
|
|
|
||
|
|
|
|
|
|
Sum 6 |
|
+ |
|
4 |
|
|
|
Gain2 |
|
Sum 3 |
|
|
|
|
|
||
|
|
|
Product3 |
+ |
sqrt |
|
– |
|
Out4 |
||
|
|
|
K- |
|
+ |
|
|
|
|
||
|
|
|
|
|
Math |
|
|
|
|
||
|
|
|
|
|
|
|
Sum 8 |
|
|
||
|
|
|
Gain5 |
|
|
Sum 6 |
Function |
|
|
|
|
|
|
K- |
|
|
|
|
|
|
|||
|
|
|
+ |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Product8 |
|
|
|
|
|
|
Gain3 |
|
+ |
Product4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
YM |
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
Sum 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Out5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mэ |
|
Рис. 9. Схема модели блока БВНК |
|
|
|
|
|
K- |
6 |
||||
|
|
|
|
Product9 |
Gain6 |
Out6 |
|||||
Fig. 9. Layout of BVNK block model |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
и Product, посредством которых производится пересчет фазных напряжений, U1u, U1v, записанных в вращающейся системе координат U, V (ось U ориентирована по вектору потокосцепления ротора) в фазные напряжения, U1α U1β, записанные в неподвижной относительно статора системе координат.
Перерасчет величин фазных напряжений производится в соответствии с выражениями
U1 |
=U1U cos |
-U1V sin ; |
(4) |
|
U1 |
=U1U sin |
+U1V sin . |
||
|
В модели блока БВНК производятся вычисления следующих значений:
косинуса и синуса угла поворота вращающейся системы координат U, V относительно неподвижной системы координат α, β;
фазных токов в статорных обмотках асинхронных машин АД1, АД2, записанных во вращающейся системе координат U, V;
модуля вектора потокосцепления ротора;
электромагнитного момента, развиваемого ГЭД. Схема модели блока БВНК приведена на
рис. 9. Модель блока собирается из библиотеч-
ных блоков Sum, Product, Transfer FSN пакета Simulink MatLab.
Схема субсистемы КУМ (имитирует подсистему управления мощностью на валу ГЭД) компьютерной модели гребного ЭП показана на рис. 10.
На входные клеммы ln1, ln2, ln3 субсистемы приходит информация о значениях электромагнитного момента (Мэ), частоты вращения (ω), раз-
1 |
Mэ |
|
|
|
|
|
|
|
|
|
K- |
|
5,23 |
1 |
|
|
|
ln1 |
|
|
|
|
|
5s |
|
|
|
|
Product1 |
Gain1 |
|
Constant 1 |
Transfer Fon 1 |
Saturation1 |
+ |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
ln2 |
|
|
|
|
|
|
|
Out1 |
3 |
Pз |
|
10s+100 |
|
1 |
|
|
– |
+ |
|
s |
|
|
|
|
||
ln3 |
– |
|
|
Out1 |
1 |
|
Sum 2 |
|
Sum 2 |
Saturation1 |
Transfer Fon 1 |
|
|
||||
|
|
|
5s |
|
|
|||
|
|
|
|
|
Step 1 |
Transfer Fon 2 |
Saturation2 |
|
Рис. 10. Схема субсистемы УМ компьютерной |
Рис. 11. Схема субсистем |
модели гребного ЭП |
ЗЧВ и ЗМ |
Fig. 10. Layout of UM subsystem in computer model |
Fig. 11. Layout of ZChV and ZM subsystems |
of electric propulsion drive |
|
96 |
Труды Крыловского государственного научного центра, 1(383)/2018 |
V. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak Computer-based model of electric propulsion drive for Project 22220 multi-purpose nuclear icebreaker
виваемых ГЭД, а также информация о задаваемом значении мощности (Рз) на валу ГЭД. С выхода Qut1 субсистемы снимается информация о необходимом изменении частоты вращения (Δω), обеспечивающем требуемую мощность, и поступающая на вход ln7 субсистемы УЧВ. В окне настройки блока Transfer Fsn 1 устанавливают значения параметров ПИ – регулятора, включенного в замкнутом контуре подсистемы регулирования мощности [1], а в окне настройки блока Saturation 1 – значение, ограничивающее величину мощности на валу ГЭД [1].
Субсистемы ЗЧВ и ЗМ компьютерной модели ЭП, отождествляющие задатчик частоты вращения и задатчик мощности на валу ГЭД, выполнены по идентичной схеме, показанной на рис. 11.
В этих субсистемах непосредственное задание частоты вращения или мощности устанавливают в окнах настройки блоков Constant 1, Step 1, а интенсивность изменения сигналов задания определяется параметрами, устанавливаемыми в окнах настройки блоков Trancfer Fcn 1, Trancfer Fcn 2, Saturation 1 и Saturation 2.
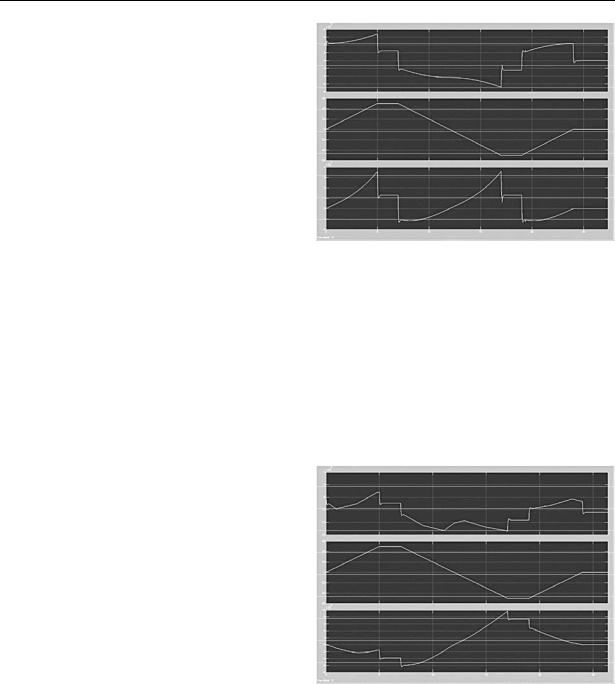
На рис. 12–18 приводятся диаграммы электромеханических процессов, протекающих в различных режимах работы гребного ЭП и воспроизводимых в ходе компьютерного моделирования.
Так, на рис. 12–13 приведены диаграммы изменения электромагнитного момента, частоты вращения и мощности на валу ГЭД, снятые в режиме регулирования частоты вращения в диапазоне от 50 до –50 об/мин, что в реальных условиях на заказе обеспечивается перемещением рукоятки управления с чередованием десяти положений в зоне «Регулирование скорости». В ходе моделирования частота вращения ГЭД изменялась строго по линейному закону, формируемому субсистемой УЧВ.
На рис. 14 приведены диаграммы изменения электромагнитного момента и частоты вращения ГЭД, снятые при скачкообразном изменении величины статического момента нагрузки. Величина скачка статического момента составляет 320 кНм, что соответствует 20 % от номинального значения. Анализ диаграмм показывает, что ЭП обеспечивает требуемую точность поддержания постоянства частоты вращения гребного винта (динамическое отклонение ее не превышает 0,3 % при длительности переходного процесса 4 с, а статическая ошибка практически равна нулю).
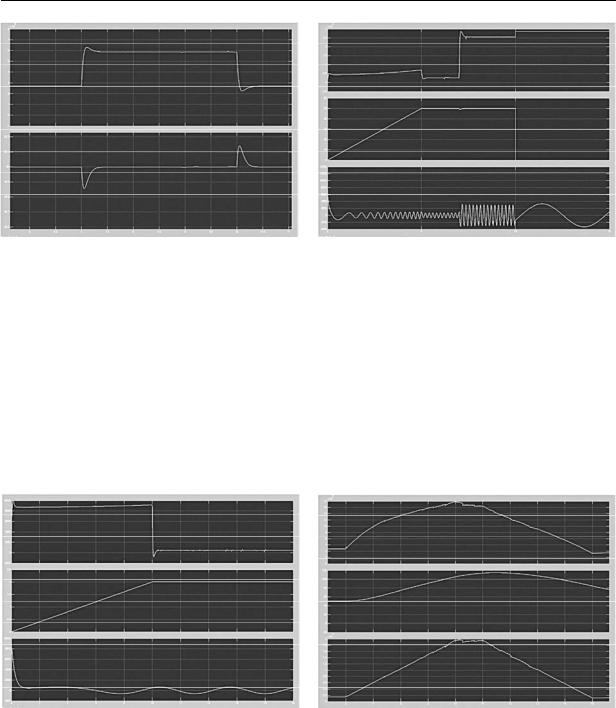
На рис. 15 представлены диаграммы изменения электромагнитного момента, частоты вращения и фазного тока ГЭД, снятые в режимах фрезе-
 ФГУП «Крыловский государственный научный центр»
ФГУП «Крыловский государственный научный центр»
Рис. 12. Диаграммы изменения электромагнитного момента, частоты вращения и мощности на валу ГЭД
впроцессе регулирования частоты вращения
вдиапазоне от 0 до 50 об/мин и реверса
вшвартовном режиме
Fig. 12. Diagrams of electromagnetic moment,
RPM and shaft power of propulsion motor during RPM variation within the range of 0–50 and during crash-stop at bollard pull
рования льда и заклинивания гребного винта. В режиме фрезерования льда статический момент нагрузки в 1,6 раза превышает номинальное значение и равен 2550 кНм, при этом ЭП поддержи-
Рис. 13. Диаграммы изменения электромагнитного момента, частоты вращения и мощности на валу ГЭД
впроцессе регулирования частоты вращения
вдиапазоне от 0 до 50 об/мин и реверса в режиме свободного хода с скоростью 23 уз
Fig. 13. Diagrams of electromagnetic moment,
RPM and shaft power of propulsion motor during RPM variation within the range of 0–50 and during crash-stop at free running with the speed of 23 knots
97
В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк Компьютерная модель гребного электропривода универсального атомного ледокола проекта 22220
Рис. 14. Диаграммы изменения электромагнитного |
Рис. 15. Диаграммы изменения электромагнитного |
момента и частоты вращения гребного электродви- |
момента, частоты вращения и тока статора |
гателя в процессе наброса и сброса статического |
гребного электродвигателя в режимах фрезерования |
момента нагрузки в швартовном режиме |
льда и заклинивания гребного винта |
Fig. 14. Diagrams of electromagnetic moment and RPM for propulsion motor during increase and decrease
of static load moment at bollard pull
Fig. 15. Diagrams of electromagnetic moment, RPM
and current in the stator of propulsion motor in ice-milling and propeller jamming conditions
вает частоту вращения ГЭД на постоянном уровне |
2880 кНм, что в 1,8 раза превышает номинальное |
|
50 об/мин, а действующее значение фазного тока |
значение. При этом действующее значение фазно- |
|
двигателя составляет 2100 А, что в 1,9 раза пре- |
го тока ГЭД составляет 2350 А, что в 2,1 раза пре- |
|
вышает номинальное значение. В режиме закли- |
вышает номинальное значение. |
|
нивания гребного винта и стоянки под током ЭП |
На рис. 16 приведены диаграммы изменения |
|
автоматически ограничивает величину электро- |
электромагнитного |
момента, частоты вращения |
магнитного момента, развиваемого ГЭД, на уровне |
и фазного тока ГЭД, |
полученные при технологиче- |
Рис. 16. Диаграммы изменения электромагнитного |
Рис. 17. Диаграммы изменения электромагнитного |
момента, частоты вращения и тока статора гребного |
момента, частоты вращения, снятые в режиме |
электродвигателя в режиме прокручивания вала |
регулирования мощности на валу гребного |
в швартовном режиме |
электродвигателя |
Fig. 16. Diagrams of electromagnetic moment, RPM
and current in the stator of propulsion motor during shaft cranking at bollard pull
Fig. 17. Diagrams of electromagnetic moment and RPM recorded during shaft power regulation
of the propulsion motor
98 |
Труды Крыловского государственного научного центра, 1(383)/2018 |