Материал: kompyuternaya-model-grebnogo-elektroprivoda-universalnogo-atomnogo-ledokola-proekta-22220
V. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak Computer-based model of electric propulsion drive for Project 22220 multi-purpose nuclear icebreaker
СУДОВЫЕ ЭНЕРГЕТИЧЕСКИЕ УСТАНОВКИ
В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк
Филиал «ЦНИИ СЭТ» ФГУП «Крыловский государственный научный центр», Санкт-Петербург, Россия
КОМПЬЮТЕРНАЯ МОДЕЛЬ ГРЕБНОГО ЭЛЕКТРОПРИВОДА УНИВЕРСАЛЬНОГО АТОМНОГО ЛЕДОКОЛА ПРОЕКТА 22220
Объект и цель научной работы. Объектом работы является гребной электропривод, входящий в состав системы электродвижения универсального атомного ледокола проекта 22220, находящегося в стадии строительства. Цель работы заключается в создании компьютерной модели гребного электропривода ледокола, представляющего собой частотно-регулируемый электропривод с алгоритмом векторного управления. Модель предназначена как для анализа электромеханических процессов, протекающих каналах электропривода, так и для синтеза его системы управления.
Материалы и методы. Исходными материалами являются научно-техническая информация, представленная в трудах, посвященных теории электропривода, а также личные наработки и многолетний опыт, накопленный авторами в ходе проведения НИР и ОКР по разработке судовых систем электродвижения. Решение поставленной задачи базируется на возможности моделирования электромеханических устройств и систем различного назначения средствами прикладной компьютерной программы Simulik и библиотеки блоков Sim Power Systems пакета MatLab.
Основные результаты. Создана компьютерная модель гребного электропривода универсального атомного ледокола проекта 22220, которая позволяет производить исследование электромеханических процессов, протекающих в различных режимах его работы. Получены виртуальные осциллограммы (токов, напряжений, частоты вращения, мощности, электромагнитного момента и пр.), характеризующие работу электропривода в режимах регулирования частоты вращения, регулирования мощности, изменения направления вращения, прокрутки вала, фрезерования льда, заклинивания винта, сбросе и набросе статического момента нагрузки. Разработанная компьютерная модель может также использоваться в процессах корректировки программного продукта, закладываемого в микропроцессорную систему управления гребным электроприводом (необходимость такой корректировки возникает при проведении пусконаладочных работ перед сдачей судна в эксплуатацию).
Заключение. Модель гребного электропривода ледокола проекта 22220 является инженерным инструментом, позволяющим уже на ранних стадиях технического проектирования производить исследование и анализ электромеханических процессов, результаты которых необходимы для проведения корректного выбора оборудования, входящего в состав электропривода. Разработанная модель после соответствующей корректировки может быть использована при техническом проектировании гребных электроприводов систем электродвижения ледокольных судов других проектов.
Ключевые слова: система электродвижения, гребной электропривод, асинхронный двигатель, векторное управление, преобразование координат. компьютерная модель, пакет прикладных программ Simulink MatLab, блок вычисления ненаблюдаемых координат, блок вычисления напряжения, диаграммы электромеханических процессов.
Авторы заявляют об отсутствии возможных конфликтов интересов.
Для цитирования: Вершинин В.И., Махонин С.В., Паршиков В.А., Хомяк В.А. Компьютерная модель гребного электропривода универсального атомного ледокола проекта 22220. Труды Крыловского государственного научного центра. 2018; 1(383): 89–100.
УДК 629.5.035-83:681.3.066+629.565.1 |
DOI: 10.24937/2542-2324-2018-1-383-89-100 |
SHIP POWERPLANTS
V. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak
TSNII SET branch of KSRC, St. Petersburg, Russia
COMPUTER-BASED MODEL OF ELECTRIC PROPULSION DRIVE FOR PROJECT 22220 MULTI-PURPOSE NUCLEAR ICEBREAKER
Object and purpose of research. The object of this study is electric propulsion drive of the electric propulsion system aboard Project 22220 multi-purpose nuclear icebreaker now under construction. The purpose of the study is to develop
ФГУП «Крыловский государственный научный центр» |
89 |

В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк Компьютерная модель гребного электропривода универсального атомного ледокола проекта 22220
computer-based model of electric propulsion drive for this icebreaker. The drive is frequency-regulated and has vector control algorithm. The model is intended to both analyse electromechanical processes taking place in the channels of the electric drive and to synthesize its control system.
Materials and methods. The study was based on scientific & technical information available in literature on electric drive theory, as well as on personal findings of the authors and on their profound experience accumulated over many years of R&D in the sphere of marine electric propulsion systems. Solution to this problem is based on the possibility to simulate various electromechanical equipment and systems by means of Simulik application software and Sim Power Systems block library of MatLab package.
Main results. The computer-based model developed under this work and representing electric propulsion drive of Project 22220 multi-purpose nuclear icebreaker makes it possible to investigate electromechanical processes taking place in different operational conditions of this drive. Virtual oscillograms were obtained for currents, voltages, RPM, power, electromagnetic moment, etc. These oscillograms characterize operation of the electric drive in the conditions of RPM regulation, power regulation, change of rotation direction, shaft cranking, ice milling, propeller jamming, decrease and increase of static load moment. The model can also be used to update the software governing microchip-based control system of the electric drive (this update becomes necessary during pre-commissioning set-to-work activities).
Conclusion. The model of electric propulsion drive for Project 22220 icebreaker is an engineering tool that enables, already at early design stages, investigation and analysis of electromechanical processes: these data are necessary for proper selection of electric drive equipment. After corresponding update, this model can be used in detailed design of electric propulsion plants for ice-breaking ships of other designs.
Key words: electric propulsion system, electric propulsion drive, asynchronous motor, vector control, conversion of coordinates, computer-based model, Similink MatLab application software package, calculation unit for non-observable coordinates, calculation unit for voltage, diagrams of electromechanical processes.
Authors declare lack of the possible conflicts of interests.
For citations: Vershinin V., Makhonin S., Parshikov V., Khomyak V. Computer-based model of electric propulsion drive for Project 22220 multi-purpose nuclear icebreaker. Transactions of the Krylov State Research Centre. 2018; 1(383): 89–100 (in Russian).
УДК 629.5.035-83:681.3.066+629.565.1 |
DOI: 10.24937/2542-2324-2018-1-383-89-100 |
Одним из основных условий успешного освоения |
рованную на основе частотно-регулируемого асин- |
арктических территорий РФ и создания транспорт- |
хронного гребного электродвигателя (ГЭД) и ста- |
ных коммуникаций, обеспечивающих поставку угле- |
тического преобразователя частоты (СПЧ). Одной |
водородов, а также цветных и редких металлов на |
из основных особенностей ЭП является то, что |
рынки Азиатского, Тихоокеанского регионов и За- |
в качестве ГЭД в нем используется электромехани- |
падной Европы является наличие мощных ледоко- |
ческий агрегат, состоящий из двух асинхронных |
лов, обеспечивающих круглогодичное сопровожде- |
машин с короткозамкнутыми роторами, причем |
ние судов по Северному морскому пути. В настоя- |
асинхронные машины имеют общий корпус, и на |
щее время в ООО «Балтийский завод – Судострое- |
статоре каждой из них размещены по две трехфаз- |
ние» производится строительство серии универсаль- |
ных обмотки. ГЭД получает питание от двух СПЧ, |
ных атомных ледоколов проекта 22220. Ледоколы |
содержащих по два преобразовательных канала, |
этой серии предназначаются для проводки крупно- |
каждый из которых нагружен на одну из четырех |
тоннажных транспортных судов во льдах толщиной |
трехфазных обмоток, уложенных на статорах ГЭД. |
до 2,9 м. Эксплуатация ледоколов предполагается |
В процессе работы гребного ЭП на выходе каждого |
в западном и восточном районах Арктики. |
преобразовательного канала СПЧ формируется |
Система электродвижения ледоколов (СЭД) |
трехфазное переменное напряжение, параметры |
этого проекта содержит три электропривода (ЭП) |
которого (действующее значение и частота) регу- |
гребных винтов с распределением мощности 1:1:1. |
лируются в соответствии с алгоритмом векторного |
Суммарная пропульсивная мощность на валах СЭД |
управления, заложенным в систему управления |
составляет 60 МВт. Сведения о функциональной |
гребного ЭП. |
схеме СЭД, режимах работы, оборудовании, вхо- |
В ходе проведения работ по проектированию |
дящем в ее состав, подробно изложены в [1]. Здесь |
и изготовлению поставочных образцов ЭП авто- |
же следует отметить, что функционально каждый |
рами статьи была разработана их компьютерная |
из трех гребных ЭП представляет собой замкнутую |
модель, которая представляет собой инструмент, |
систему автоматического регулирования, синтези- |
позволяющий уже на ранних стадиях технического |
90 |
Труды Крыловского государственного научного центра, 1(383)/2018 |
V. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak Computer-based model of electric propulsion drive for Project 22220 multi-purpose nuclear icebreaker
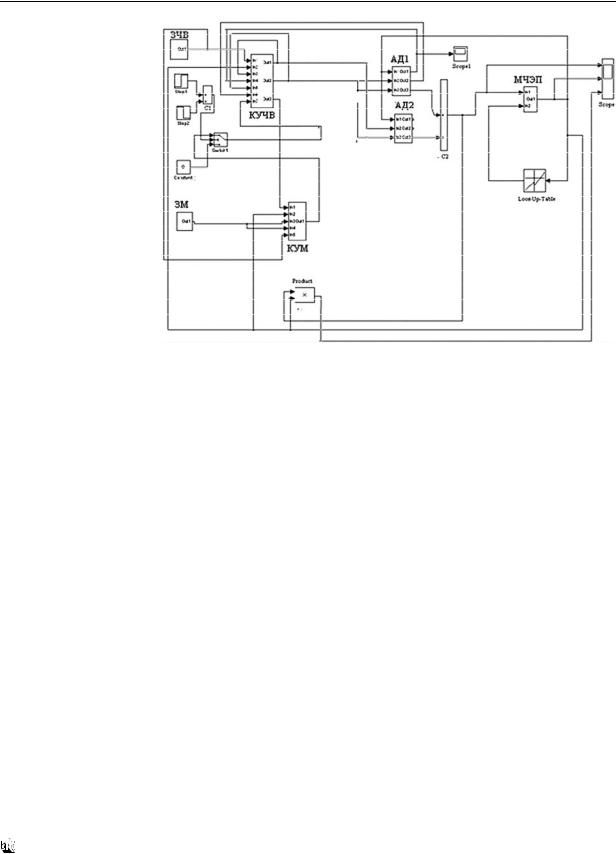
Рис. 1. Схема компьютерной модели гребного электропривода ледокола
Fig. 1. Layout
of the computer-based model representing electric propulsion drive of icebreaker
проектирования производить исследование и анализ электромеханических процессов, протекающих в гребных ЭП СЭД ледокола в различных режимах их работы (регулирование частоты вращения гребных винтов, регулирование мощности на гребных валах, режимы реверса, режимы фрезерования льда и заклинивания винта). Созданная модель может также использоваться для окончательной настройки регуляторов и корректировки программного продукта, закладываемого в микропроцессорную систему управления гребными ЭП, которые будут производиться в процессе пусконаладочных работ на строящемся заказе, предшествующих проведению швартовных и ходовых испытаний ледокола.
Ценность разработанной модели заключается в том, что после соответствующей корректировки она может быть использована в ходе проектирования СЭД ледоколов других новых и перспективных проектов, в частности ледокола проекта «Лидер».
Вышеуказанная компьютерная модель гребного ЭП создана средствами пакета прикладных программ Simulink MATLAB, ее схема приведена на рис. 1.
Модель содержит следующие субсистемы, созданные из библиотечных блоков пакета:
субсистема МЧЭП, воспроизводящая механическую часть гребного ЭП;
субсистемы ЗЧВ и ЗМ, отождествляющие задатчик частоты вращения и задатчик мощности на валу ГЭД;
субсистемы КУЧВ, КУМ, имитирующие каналы системы управления ЭП (первая – частотой вращения ГЭД, вторая – мощностью на
его валу).
Кроме перечисленных субсистем в модели гребного ЭП используются блоки, непосредственно входящие в состав библиотеки пакета Simulink MatLab, а именно: сумматоры С1, С2, ключи Switch 1, Switch 2, формирователь постоянной величины Constant1, виртуальные осциллографы Sgope1, Scope 2, формирователь табличной функ-
ции Look-Up-Table.
Создание субсистем АД1, АД2, имитирующих асинхронные машины ГЭД, базируется на математическом описании процесса преобразования электрической энергии в механическую, протекающего в обобщенной электрической машине, которое содержит пять дифференциальных уравнений [2]. Четыре уравнения – это уравнения электрического равновесия напряжений в ее обмотках, и пятое уравнение описывает электромагнитный момент как функцию электрических и механиче-
субсистемы АД1, АД2, имитирующие асинских координат. Вышеуказанные уравнения, запи-
хронные машины ГЭД; |
санные в двухфазной системе координат α, β, |
ФГУП «Крыловский государственный научный центр» |
91 |
В.И. Вершинин, С.В. Махонин, В.А. Паршиков, В.А. Хомяк Компьютерная модель гребного электропривода универсального атомного ледокола проекта 22220
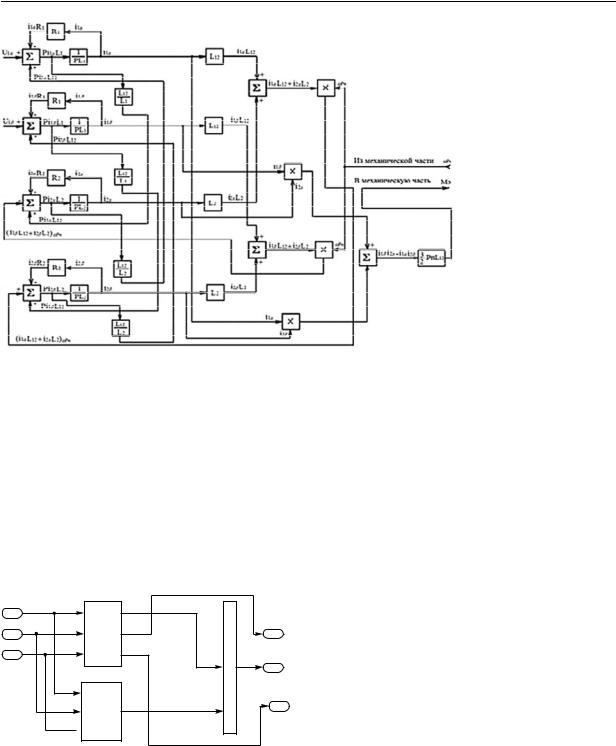
Рис. 2. Структурная схема процесса электромеханического преобразования энергии
Fig. 2. Flow chart for the process of electromechanical energy conversion
неподвижной относительно статора, имеют следующий вид:
U1 |
= (R1 + рL1)i1 + рL12i2 ; |
||||
U1 |
= (R1 + рL1)i1 + рL12i2 ; |
||||
0 = (R2 + рL2 )i2 + рL12i1 + L12 Э"i1 + L2 Эi2 ; (1) |
|||||
0 = (R2 + рL2 )i2 + рL12i1 - L12 Эi1 - L2 Эi2 ; |
|||||
М |
|
= |
3 |
Р L (i i |
-i i ). |
|
Э |
2 |
П 12 1 2 |
1 2 |
|
Здесь R1 и R2 – активные сопротивления фазных обмоток статора и ротора обобщенной электриче-
1 |
|
Mэ |
|
|
ln1 |
U1 i1 |
|
|
|
2 |
|
1 |
||
ln2 |
U1 |
i1 |
|
Out1 |
3 |
|
|
||
ln3 |
АД1 |
+ |
3 |
|
|
||||
|
|
Out3 |
||
|
|
|
|
|
|
|
|
|
|
|
U1 |
Mэ |
+ |
2 |
|
Out2 |
|||
|
|
|
|
|
 U1
U1
С1
АД2
Рис. 3. Схема компьютерной модели гребного электродвигателя
Fig. 3. Layout of the computer-based model representing propulsion motor
ской машины; L1 и L2 – индуктивности фазных обмоток статора и ротора обобщенной электрической машины; L12 – взаимная индуктивность между фазными обмотками, уложенными на статоре и роторе, когда в процессе вращения ротора магнитные оси обмоток совпадают; U1α и U1β – напряжения, прикладываемые к обмоткам статора, уложенным вдоль координатных осей α и β; i1α, i1β – токи, протекающие в обмотках статора, уложенных вдоль координатных осей α и β; МЭ – электромагнитный момент, развиваемый обобщенной электрической машиной; ωЭ – частота вращения ротора, умноженная на число пар полюсов; РП – число пар полюсов обобщенной электрической машины; p – оператор Лапласа. Структурная схема процесса электромеханического преобразования энергии, соответствующая системе уравнений (1), показана на рис. 2.
Поскольку ГЭД, как уже упоминалось выше, представляет собой электромеханический агрегат, состоящий из двух асинхронных машин, нагруженных на единый вал, то его компьютерная модель должна содержать две субсистемы, каждая их которых должна имитировать процесс преобразования электрической энергии в механическую, протекающий в этих машинах. Схема компьютерной модели ГЭД, соответствующая этому положению, приведена на рис. 3.
На входы ln1, ln2, ln3 этих субсистем поступают фазные напряжения U1α и U1β, и частота враще-
92 |
Труды Крыловского государственного научного центра, 1(383)/2018 |
V. Vershinin, S. Makhonin, V. Parshikov, V. Khomyak Computer-based model of electric propulsion drive for Project 22220 multi-purpose nuclear icebreaker
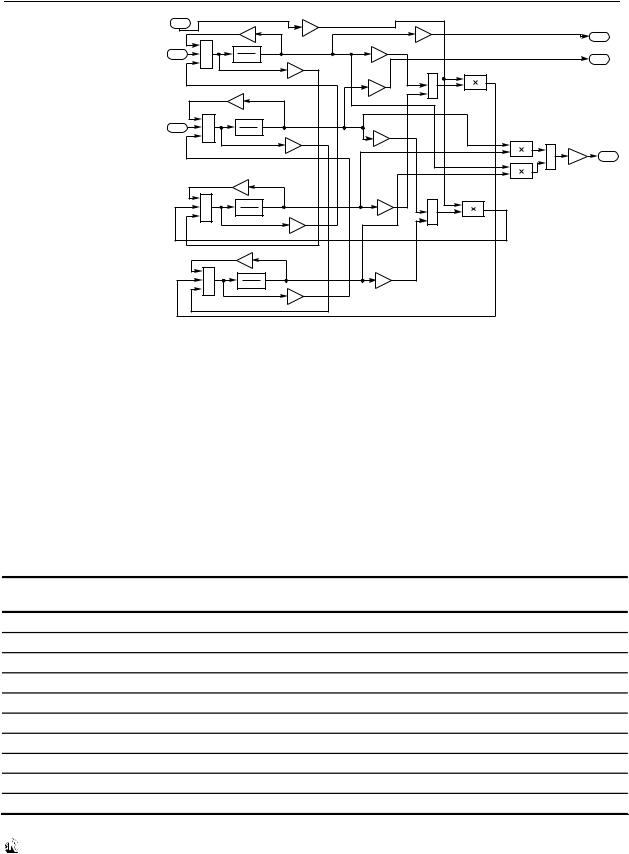
Рис. 4. Схема субсистем АД1, АД2 модели гребного электродвигателя
Fig. 4. Layout of AD1, AD2 subsystems
of propulsion motor
1 |
|
Gain 1 |
6 |
|
|
|
|
|
|
|
|
1 |
|
|
|
||
|
-K- |
|
|
|
2 |
|||
|
|
Gain 9 |
|
|
||||
|
– |
|
|
Gain |
|
|||
|
|
|
|
i1 |
||||
2 |
1 |
|
|
|
||||
+ |
0,04s |
|
K- |
|
|
3 |
||
U1 |
– |
|
|
|
|
|||
Transfer Fon 1 |
K- |
Gain 10 |
|
|
i |
|
||
Sum 1 |
|
|
1 |
|||||
|
|
Gain 5 |
|
|
|
|
||
|
|
|
1 |
+ |
|
|
|
|
|
Gain 2 |
|
|
|
|
|||
|
|
Gain 11 |
+ |
Product 1 |
|
|
||
|
|
-K- |
|
Sum 5 |
|
|
|
|
|
– |
1 |
|
|
|
|
|
|
3 |
+ |
|
|
|
|
|
|
|
0,04s |
|
|
|
Product 3 |
|
|
||
U1 |
– |
Transfer Fon 2 |
K- |
K- |
|
|
|
|
Sum 2 |
Gain 12 |
|
|
|
|
|||
|
|
|
+ |
|
|
|||
|
|
|
Gain 6 |
|
|
|
1 |
|
|
|
|
|
|
-K- |
|
||
|
|
|
|
|
|
– |
|
Mэ |
|
Gain 3 |
|
|
|
Sum 7Gain 15 |
|
||
|
|
|
|
Product 4 |
|
|
||
|
|
-K- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
1 |
|
|
|
|
|
|
|
– |
|
K- |
|
|
|
|
|
|
0,04s |
|
+ |
|
|
|
||
|
– |
|
Gain 13 |
|
|
|
||
|
Transfer Fon 3 |
|
+ |
Product 2 |
|
|
||
|
Sum 3 |
K- |
|
|
||||
|
|
|
Sum 6 |
|
|
|
||
|
|
|
Gain 7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain 4 |
|
|
|
|
|
|
|
|
|
-K- |
|
|
|
|
|
|
|
– |
1 |
|
|
|
|
|
|
|
+ |
|
K- |
|
|
|
|
|
|
0,04s |
|
|
|
|
|
||
|
– |
|
Gain 14 |
|
|
|
|
|
|
Transfer Fon 4 |
K- |
|
|
|
|
||
|
|
|
|
|
|
|||
|
Sum 4 |
|
|
|
|
|
|
|
|
|
Gain 8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния ω соответственно. Электромагнитный момент, развиваемый ГЭД, является суммой электромагнитных моментов асинхронных машин АД1 и АД2 и снимается с выхода ln3.
Субсистемы АД1, АД2 являются идентичными
иимеют схему, приведенную на рис. 4.
Всостав субсистем входят библиотечные бло-
ки пакета Simulink MATLAB (Cain, Sum, Transfer Fcn, Product), входы и выходы которых соединены
всоответствии с структурной схемой процесса преобразования энергии, приведенной на рис. 2.
Вокнах настройки этих блоков устанавливаются
численные значения параметров элементов структурной схемы, которые рассчитываются по формулам [2]:
L = |
Х1 + Хm |
; |
L = |
Х2 + Хm |
; |
L |
= |
Хm |
, |
(2) |
1 |
6, 28 fН |
2 |
6, 28 fН |
12 |
|
6,28 fН |
|
|
||
|
|
|
|
|
|
|||||
где Х1 – индуктивное сопротивление фазы статора, Ом; Х2 – индуктивное сопротивление фазы ротора, приведенное к статору, Ом; Хm – индуктивное контура намагничивания, Ом; fН – номинальная частота напряжения статора, Гц.
Таблица. Параметры схемы замещения двигателя ГЭД 2х10000-3-165О5
Table. Parameters of substitution layout for propulsion motor GED 2х10000-3-165О5
Обозначение
параметра
РН
U1Н
I1Н fН
РП
R1
R2
X1
X2 Xm
Наименование параметра |
Величина |
|
параметра |
||
|
||
Номинальная мощность, МВт |
20 |
|
Номинальное действующее значение линейного напряжения статора, В |
3000 |
|
Номинальное действующее значение тока статора, А |
4×1100 |
|
Номинальная частота напряжения статора, Гц |
12–16,5 |
|
Число пар полюсов |
6 |
|
Активное сопротивление фазы обмотки статора, Ом |
0,0188 |
|
Активное сопротивление фазы ротора, приведенное к статору, Ом |
0,011 |
|
Индуктивное сопротивление фазы обмотки статора, Ом |
0,145 |
|
Индуктивное сопротивление фазы ротора, приведенное к статору, Ом |
0,0855 |
|
Индуктивное сопротивление контура намагничивания, Ом |
2,93 |
ФГУП «Крыловский государственный научный центр» |
93 |