Материал: Кинематический, силовой и динамический расчёт механизма качающегося конвейера
.6 Построение графика энергомасс
График энергомасс строиться
исключением параметра φ
из
графиков ![]() и
и ![]() (рис. 10).
Ось ординат графика энергомасс обозначаем
(рис. 10).
Ось ординат графика энергомасс обозначаем ![]() . График
. График ![]() повернуть
на 90˚, чтобы его ось абсцисс направилась вниз, а ось ординат - вправо.
Проведя вертикали через концы 0.1,2....,12 повернутых ординат графика
повернуть
на 90˚, чтобы его ось абсцисс направилась вниз, а ось ординат - вправо.
Проведя вертикали через концы 0.1,2....,12 повернутых ординат графика ![]() и
горизонтали через концы 0,1,2,..,12 ординат графика
и
горизонтали через концы 0,1,2,..,12 ординат графика![]() , находим
точки пересечения одноименных вертикалей и горизонталей и обозначим их
соответствующими номерами 0,1,2,...,12. Соединяя последовательно полученные
точки, строим линию графика энергомасс.
, находим
точки пересечения одноименных вертикалей и горизонталей и обозначим их
соответствующими номерами 0,1,2,...,12. Соединяя последовательно полученные
точки, строим линию графика энергомасс.
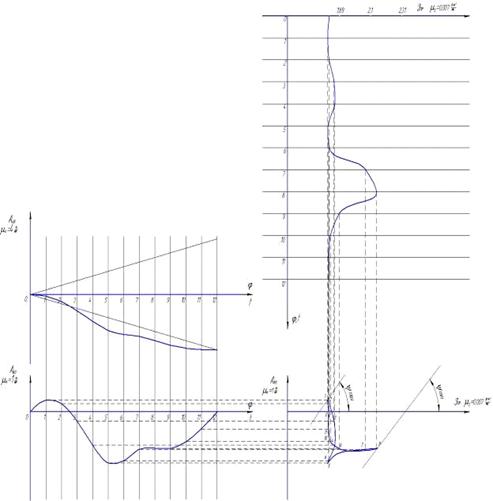
Рис. 10. Построений графика
энергомасс.
.7 Расчет углов наклона касательных
к графику энергомасс
Определяем максимальное и
минимальное значения угловой скорости входного звена.
![]() , (2.4)
, (2.4)
![]() . (2.5)
. (2.5)
δ =0,05 - коэффициент неравномерности движения.
Определяем углы касательных к
диаграмме энергомасс.
 , (2.6)
, (2.6)
 , (2.7)
, (2.7)
где ![]() - масштаб по оси абсцисс графика
энергомасс;
- масштаб по оси абсцисс графика
энергомасс;
![]() - масштаб по оси ординат графика
энергомасс.
- масштаб по оси ординат графика
энергомасс.
Далее проводим касательные под углом
относительно оси абсцисс к верхней части кривой графика энергомасс в
направлении справа вниз налево, под углом, относительно оси абсцисс к нижней
части кривой в том же направлении.
.8 Определение момента инерции
маховика
Проведенные к графику энергомасс
касательные до пересечения с осью ![]() отсекают на ней отрезок
отсекают на ней отрезок ![]() =52,71мм, по
которому определяется момент инерции маховика, установленного на валу входного
звена
=52,71мм, по
которому определяется момент инерции маховика, установленного на валу входного
звена
![]() . (2.8)
. (2.8)
Выразим вес обода через его объем и
удельный вес и введя обозначения ![]() (b- ширина
венца обода маховика);
(b- ширина
венца обода маховика); ![]() (h- высота
венца обода маховика)
(h- высота
венца обода маховика)
![]() м, (2.9)
м, (2.9)
где ![]() - удельный вес материала = 73000Н/м3(для
чугунного маховика);
- удельный вес материала = 73000Н/м3(для
чугунного маховика);
h=0.0636м, b=0.0318м. По
полученным данным строим эскиз маховика.
.9 Построение диаграммы изменения угловой
скорости
Для построение диаграммы необходимо
вычислить фактическую угловую скорость входного звена по формуле
 , (2.10)
, (2.10)
в которой ![]() -
приведённый момент инерции механизма в положении максимума угловой скорости,
кгм2;
-
приведённый момент инерции механизма в положении максимума угловой скорости,
кгм2; ![]() - работа в
той же точке, Дж;
- работа в
той же точке, Дж; ![]() - работа в
текущем положение механизма, Дж;
- работа в
текущем положение механизма, Дж; ![]() - приведённый момент инерции
механизма в его текущем положении, кгм2.
- приведённый момент инерции
механизма в его текущем положении, кгм2.
Для выполнения расчёта необходимо в
каждом из двенадцати положений механизма определить по диаграмме энергомасс
разность ординат ![]() ,
предварительно отметив точку касательной, соответствующей
,
предварительно отметив точку касательной, соответствующей ![]() с кривой
графика энергомасс (рис. 11) (эта точка на рис. 10 отмечена звёздочкой). По
абциссе точки касания
с кривой
графика энергомасс (рис. 11) (эта точка на рис. 10 отмечена звёздочкой). По
абциссе точки касания ![]() определяется
первое слагаемое числителя подкоренного выражения (2.10), и с учётом разности
ординат
определяется
первое слагаемое числителя подкоренного выражения (2.10), и с учётом разности
ординат ![]() ,
выполняются дальнейшие расчёты [2].
,
выполняются дальнейшие расчёты [2].
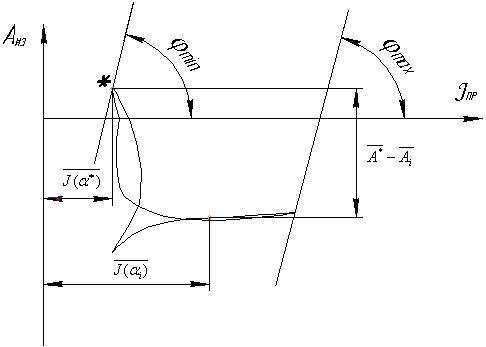
Рис. 11. К определению фактической
угловой скорости выходного звена.
Результаты расчёта угловой скорости
представляются в виде графика (рис. 12), на котором по оси абцисс откладываются
положения механизма 0, 1, 2, …, 12, а по оси ординат - значения разности ![]() [2].
Расчёты угловой скорости и изменения угловой скорости приведены в таблице 4.
[2].
Расчёты угловой скорости и изменения угловой скорости приведены в таблице 4.
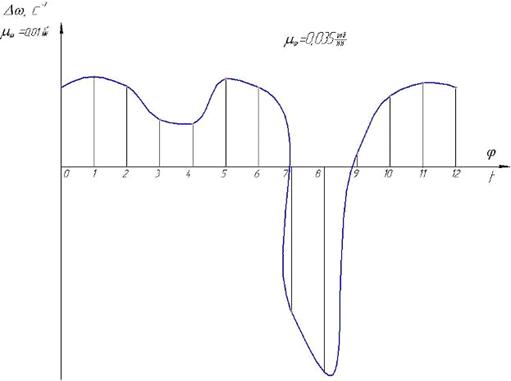
Рис. 12. График фактической угловой
скорости входного звена.
Таблица 4
|
№ пол. |
|
|
|
1 |
17,16875 |
0,41875 |
|
2 |
17,1246 |
0,374 |
|
3 |
16,97 |
0,22 |
|
4 |
16,95 |
0,2 |
|
5 |
17,16 |
0,41 |
|
6 |
17,12 |
0,37 |
|
7 |
16,072 |
-0,67 |
|
8 |
15,792 |
-0,96 |
|
9 |
16,81 |
0,06 |
|
10 |
17,08 |
0,33 |
|
11 |
17,08 |
0,39 |
|
0,12 |
17,12 |
0,37 |
3. Силовой расчёт механизма
Задачей силового расчёта является определение сил действующих на звенья в кинематических парах, решают вопросы об уравновешенности механизма.
В силовом расчёте кинематическую цепь разбивают на группы Ассура, которые являются статически определимыми. Расчёт ведётся путём последовательного рассмотрения условий равновесия каждой группы, начиная с наиболее удаленной от исходного механизма, последним рассчитывается ведущее звено.
Определение реакций в
кинематических парах механизма ведем без учета трения методом планов сил при
постоянной угловой скорости кривошипа.
.1 Силовой расчет группы Ассура
второго класса пятого вида 4 и 5 звеньев
Силовой расчет механизма ведем для
положения № 1, для которого построен план ускорений. Изображаем схему
нагружения в масштабе μl=0,002м/мм,
сохраняя положения звеньев, сила сопротивления ![]() . Прикладываем силу веса
. Прикладываем силу веса ![]() и силу
инерции
и силу
инерции ![]() .
.
Со стороны отброшенных звеньев в
поступательной паре прикладываем неизвестную реакцию ![]() перпендикулярно
направляющей ползуна и в шарнире С прикладываем также неизвестную реакцию
перпендикулярно
направляющей ползуна и в шарнире С прикладываем также неизвестную реакцию ![]() ,
перпендикулярную коромыслу (рис. 13).
,
перпендикулярную коромыслу (рис. 13).
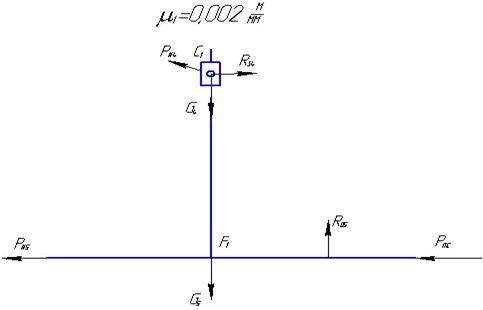
Рис. 13. Схема нагружения 4 и 5 звеньев.
Для того, чтобы определить ![]() и
и ![]() , запишем
уравнение равновесия все группы в векторной форме
, запишем
уравнение равновесия все группы в векторной форме
![]() . (3.1)
. (3.1)
Векторы сил, известные по величине и
направлению, подчеркнуты двумя чертами, известные только по направлению линии
действия одной, в данном случае это силы ![]() и
и ![]() (рис. 14).
(рис. 14).
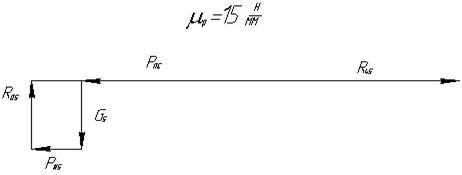
Рис. 14. Пример построения плана сил выходного звена механизма.
Для построения плана сил определяем
масштабный коэффициент плана сил ![]() , а отрезки, выражающие векторы сил
на плане, получаются делением натуральных значений на масштаб плана.
, а отрезки, выражающие векторы сил
на плане, получаются делением натуральных значений на масштаб плана.