Материал: Кинематический, силовой и динамический расчёт механизма качающегося конвейера
Кинематический, силовой и динамический расчёт механизма качающегося конвейера
Курсовой проект
по теории механизмов и машин
на тему кинематический, силовой и динамический
расчёт механизма качающегося конвейера
Оглавление
Введение
. Кинематический расчёт механизма
.1 Структурный анализ механизма
.2 Разметка механизма
.3 Расчёт скоростей методом планов
.4 Расчёт ускорений методом планов
.5 Кинематический расчёт механизма методом кинематических диаграмм
. Динамический расчёт механизма
.1 Построение силовой диаграммы и диаграммы сил полезного сопротивления
.2 Построение диаграммы приведённых моментов сил
.3 Построение диаграмм работ
.4 Определение избыточной работы
.5 Определение приведенного момента инерции механизма
.6 Построение графика энергомасс
.7 Расчет углов наклона касательных к графику энергомасс
.8 Определение момента инерции маховика
.9 Построение диаграммы изменения угловой скорости
. Силовой расчёт механизма
.1 Силовой расчет группы Ассура второго класса пятого вида 4 и 5 Звеньев
.2 Силовой расчет группы Ассура второго класса первого вида 2 и 3 Звеньев
.3 Силовой расчет ведущего звена
.4 Определение уравновешивающего момента силы методом «жёсткого рычага» Н.Е. Жуковского
Заключение
Список
литературы
Введение
Развитие современной науки и техники неразрывно связано с созданием новых машин, повышающих производительность и облегчающих труд людей, а также обеспечивающих средства использования законов природы и жизни человека.
Целью создания машины является увеличение производительности и облегчения физического труда человека путём замены человека машиной.
Таким образом, понятием машины охватывается большое число самых различных объектов, применяемых человеком для своих трудовых и физиологических функций.
Понятие «машина» может быть представлено следующим образом: машина есть устройство, создаваемое человеком для изучения и использования законов природы с целью облегчения физического и умственного труда, увеличения его производительности и облегчения путём частичной или полной замены человека в его трудовых и физиологических функциях.
В данном курсовом проекте представлены
расчёты механизма качающегося конвейера, которые состоят из структурного
анализа механизма; кинематического анализа механизма, выполненного при помощи
планов скоростей и ускорений; динамического анализа механизма с расчётом
параметров маховика с заданной неравномерностью «![]() » движения главного вала; силового
анализа механизма, в котором представлены расчёты сил реакций, действующих на
звенья, определения уравновешенного момента силы, и определение погрешности при
нахождение моментов сил, найденных разными способами, планом сил и методом
«жёсткого рычага» Н.Е. Жуковского.
» движения главного вала; силового
анализа механизма, в котором представлены расчёты сил реакций, действующих на
звенья, определения уравновешенного момента силы, и определение погрешности при
нахождение моментов сил, найденных разными способами, планом сил и методом
«жёсткого рычага» Н.Е. Жуковского.
1. Кинематический расчёт механизма
1.1 Структурный анализ
механизма
Любой плоский механизм можно представить как совокупность кинематических цепей, одна из которых имеет подвижность равную подвижности механизма и называется исходным механизмом, а остальные имеют подвижность равную нулю. Кинематические цепи с нулевой подвижностью получили название структурных групп или групп Ассура.
Структурной группой называют простейшую кинематическую цепь, содержащую пары 5 класса и теряющую столько степеней свободы после присоединения к стойке, сколько она имела до соединения.
Подвижность механизма определим
по формуле Чебышева [1]
W=3n-2P5-P4,
(1.1)
где n - число подвижных звеньев;
Р5 - кинематических пар 5 класса; P4- число кинематических пар 4 класса;
Подвижность показывает сколько независимых движений нужно сообщить звеньям механизма, чтобы обеспечить определённость движения последнего.
В нашем случае W=3*5-2*7=l, следовательно, в механизме одно звено, способное совершать независимое движение.
Механизм качающегося конвейера состоит из 6 звеньев:
О1 - стойка, О1А - кривошип, АВ - шатун, О2 B- коромысло, C4- камень кулисы, F - ползун.
Структурная схема механизма приведена на рис. 1.
Формула образования механизма
![]()
Наиболее высокий класс группы,
входящей в состав механизма равен II,
следовательно, наш механизм второго класса, второго порядка.
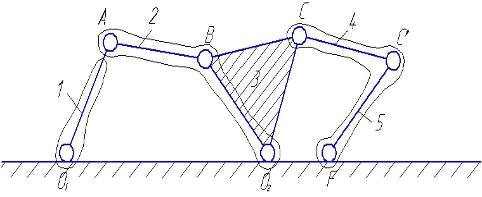
Рис. 1. Структурная схема механизма.
Кинематический расчёт скоростей и ускорений начинают с исходного механизма и приводят в порядке присоединения структурных групп к исходному механизму.
Силовой расчёт начинают с последней
в формуле строения структурной группы и проводят в обратном порядке
присоединения структурной группы к исходному механизму, то есть исходный
механизм рассчитывают в последнюю очередь.
.2 Разметка механизма
Разметкой механизма называется ряд последовательных положений его звеньев в зависимости от положения начального звена, охватывающий весь цикл движения этого звена.
В выбранном масштабе,
характеризуемом масштабным коэффициентом μ![]() =0.001 м/мм, на горизонтальной
прямой отложим отрезок, равный
=0.001 м/мм, на горизонтальной
прямой отложим отрезок, равный ![]() , далее вверх
, далее вверх ![]() для
определения положения стойки
для
определения положения стойки ![]() , и
, и ![]() для определения положения
направляющей звена 5. Из точки
для определения положения
направляющей звена 5. Из точки ![]() радиусом
радиусом ![]() проводим
окружность, траекторию движения точки А кривошипа АВ. Из точки
проводим
окружность, траекторию движения точки А кривошипа АВ. Из точки ![]() проводим
окружность радиусом
проводим
окружность радиусом ![]() , траекторию
движения точки В кривошипа АВ и точки С ползуна (рис. 2).
, траекторию
движения точки В кривошипа АВ и точки С ползуна (рис. 2).
Для дальнейшего построения разметки сначала нужно определить крайние положения механизма.
Крайние положения механизма
определяются взаимным расположением кривошипа и шатуна, поэтому построение
крайних положений начинаем с этих звеньев. Крайние положения точки А будут
определяться в двух случаях, когда кривошип и шатун будут параллельны сами
себе, то есть в первом случае шатун и кривошип сложатся в одну линию, и во
втором случае - шатун и кривошип вытянуться в одну линию. Полученные точки
обозначаем ![]() , далее
определяем крайние положения точек
, далее
определяем крайние положения точек ![]() ,
,![]() и
и ![]() .
.
Расстояние на окружности движения
кривошипа между полученными точками А0 и А6 соответствует
рабочему ходу механизма, расстояние от А6 до А12
соответствует холостому ходу, соответственно, разбиваем каждый на 6 равных
частей. Получаем 10 промежуточных положений точек А, определяющих положения
кривошипа ![]() . С помощью
геометрических построений определяем 10 положений точек В, С. Центр тяжести
звена АВ определяем из условия
. С помощью
геометрических построений определяем 10 положений точек В, С. Центр тяжести
звена АВ определяем из условия ![]() . Центр тяжести звена
. Центр тяжести звена ![]() находится в
точке С коромысла. Центр тяжести звеньев 4, находится в точке С, и 5 находится
в точке F.
находится в
точке С коромысла. Центр тяжести звеньев 4, находится в точке С, и 5 находится
в точке F.
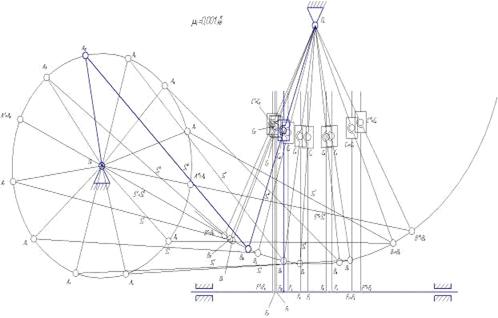
Рис. 2. Разметка механизма.
.3 Расчёт скоростей методом
планов
Для расчёта скоростей методом планов необходимы следующие исходные данные: число оборотов кривошипа в минуту (n=160 об/мин), длина кривошипа (O1А = 0,08м).
Требуется определить скорость VA и угловое
ускорение первого звена![]() точки А.
Число оборотов и угловая скорость связаны соотношением
точки А.
Число оборотов и угловая скорость связаны соотношением
![]() . (1.2)
. (1.2)
Скорость точки А
![]() (1.3)
(1.3)
направлена перпендикулярно звену O1А в сторону его вращения (в данном случае против часовой стрелки).
Построение плана скоростей механизма
начинаем с выбора масштабного коэффициента плана скоростей
![]() , (1.4)
, (1.4)
где ![]() -отрезок, который будет изображать
на плане скоростей скорость VA
-отрезок, который будет изображать
на плане скоростей скорость VA
![]() = 134мм, VA =1,34мм, μV=
= 134мм, VA =1,34мм, μV=![]() =0,01
=0,01![]() .
.
Выбираем полюс плана скоростей
произвольную точку p. Проводим из точки p
перпендикулярно кривошипу O![]() A прямую, на которой откладываем
вектор длиной
A прямую, на которой откладываем
вектор длиной ![]() в сторону
вращения кривошипа. Для определение скоростей точки В можно записать следующие
векторные уравнения
в сторону
вращения кривошипа. Для определение скоростей точки В можно записать следующие
векторные уравнения
![]() , (1.5)
, (1.5)
![]() ,
,
где VА -
скорость точки А, направлена по касательной к траектории движения кривошипа,
перпендикулярно О![]() А; VAB - скорость
движения точки B относительно А, направлена
перпендикулярно звену АВ;
А; VAB - скорость
движения точки B относительно А, направлена
перпендикулярно звену АВ; ![]() - скорость
движения точки B относительно О2,
направлена перпендикулярно звену О2В проведена из полюса. Таким
образом, чтобы построить VВ, надо из
конца вектора pa провести
перпендикуляр к AВ до пересечения с линией действия
вектора скорости
- скорость
движения точки B относительно О2,
направлена перпендикулярно звену О2В проведена из полюса. Таким
образом, чтобы построить VВ, надо из
конца вектора pa провести
перпендикуляр к AВ до пересечения с линией действия
вектора скорости ![]() (проведенной
через полюс). Полученный вектор
(проведенной
через полюс). Полученный вектор ![]() и будет вектором скорости точки B (рис. 3).
и будет вектором скорости точки B (рис. 3).
Для определения положения скорости центра масс звена 2 запишем соотношение
![]() . (1.6)
. (1.6)
Отложив от точки a плана
скоростей отрезок ![]() на линии
на линии ![]() и соединив
точку
и соединив
точку ![]() с полюсом
плана скоростей, получим вектор
с полюсом
плана скоростей, получим вектор ![]() скорости точки
скорости точки ![]() , а
натуральная величина найдется как
, а
натуральная величина найдется как
![]() =
= ![]() . (1.7)
. (1.7)
Для
определение скорости точки С надо составить следующее соотношение
 , (1.8)
, (1.8)
скорость точки С выражается вектором
![]() находящимся
на продолжение линии действия вектора
находящимся
на продолжение линии действия вектора ![]() .
.
Для нахождения скорости точки F, проводим перпендикулярную линию из точки С до пересечения с горизонтальной прямой, проведённой из полюса p, по которой движется точка F.
Результаты расчёта скоростей
приведены в таблице 1.
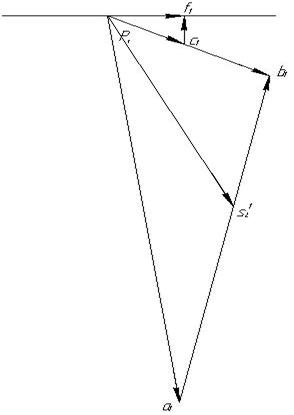
Рис. 3. Пример построения плана
скоростей первого положения механизма.
Таблица 1.
|
№ пол. |
VA, м/с |
VAB, м/с |
VB, м/с |
VC,, м/с |
VCF,м/с |
VF,м/с |
VS2,м/с |
|
1 |
1,34 |
1,1461 |
0,4757 |
0,2239 |
0,097 |
0,2018 |
0,734 |
|
2 |
1,34 |
0,7333 |
0,9522 |
0,4481 |
0,1346 |
0,4274 |
1,0645 |
|
3 |
1,34 |
0,2905 |
1,2753 |
0,6001 |
0,0477 |
0,5982 |
1,2938 |
|
4 |
1,34 |
0,1164 |
1,3195 |
0,6209 |
0,1136 |
0,6104 |
1,3265 |
|
5 |
1,34 |
0,5951 |
0,9783 |
0,4604 |
0,1882 |
0,4202 |
1,0989 |
|
6 |
1,34 |
1,34 |
0 |
0 |
0 |
0 |
0,5262 |
|
7 |
1,34 |
1,973 |
1,317 |
0,6198 |
0,2534 |
0,5656 |
0,9055 |
|
8 |
1,34 |
1,524 |
1,9286 |
0,9076 |
0,1158 |
0,9002 |
1,5468 |
|
9 |
1,34 |
0,2179 |
1,4586 |
0,6864 |
0,1132 |
0,677 |
1,4083 |
|
10 |
1,34 |
0,7519 |
0,8536 |
0,3538 |
0,1243 |
0,3313 |
1,0099 |
|
11 |
1,34 |
1,224 |
0,3913 |
0,1841 |
0,0823 |
0,1648 |
0,6712 |
|
0,12 |
1,34 |
1,34 |
0 |
0 |
0 |
0 |
0,5262 |
1.4 Расчёт ускорений методом
планов
Построение плана ускорений
рассмотрим на примере 1-го положения механизма. Для расчёта ускорений методом
планов необходимы следующие данные: длина кривошипа (O1А
= 0,08м), ускорение точки А - aA
,
рассчитываемое по формуле
![]() . (1.9)
. (1.9)
Выбираем полюсное расстояние p, от полюса
откладываем отрезок pa a, который
будет равен ускорению точки А в направлении, от точки вращение А к центру
вращения ![]() . Определяем
масштабный коэффициент [1]
. Определяем
масштабный коэффициент [1]
![]() =
=![]() =
=![]()
![]() .
.
Для определения ускорения точки B запишем
векторные уравнения [1]
![]() , (1.10)
, (1.10)
где aA - ускорение точки А кривошипа;
![]() - нормальное ускорение звена АВ;
определяем как
- нормальное ускорение звена АВ;
определяем как
 , (1.11)
, (1.11)
![]() - отрезок с плана скоростей;
- отрезок с плана скоростей;
LАВ- расстояние между точками А и В, м;
![]() - тангенциальное ускорение звена
АВ.
- тангенциальное ускорение звена
АВ.
Определить ускорение точки В также
можно по следующему векторному уравнению
![]() , (1.12)
, (1.12)
где ![]() - нормальное ускорение звена О2В;
определяем как
- нормальное ускорение звена О2В;
определяем как
 , (1.13)
, (1.13)
![]() - отрезок с плана скоростей;
- отрезок с плана скоростей;
![]() - расстояние между точками О2
и В, м;
- расстояние между точками О2
и В, м;
![]() - тангенциальное ускорение звена О2В.
- тангенциальное ускорение звена О2В.
Из конца pa a (рис.3)
проводим вектор ![]() в
предварительно выбранном масштабе, из его конца проводим линию действия вектора
в
предварительно выбранном масштабе, из его конца проводим линию действия вектора
![]() , которая
перпендикулярна линии действии предыдущего вектора. Ее проводим до пересечения
с линией действия тангенциальной составляющей
, которая
перпендикулярна линии действии предыдущего вектора. Ее проводим до пересечения
с линией действия тангенциальной составляющей ![]() скорости звена О2В,
которая проходит перпендикулярно
скорости звена О2В,
которая проходит перпендикулярно ![]() , линия действия которого
параллельна звену О2В и проходит через полюс р. Точка пересечения
этих двух лучей определяет величины и направления векторов
, линия действия которого
параллельна звену О2В и проходит через полюс р. Точка пересечения
этих двух лучей определяет величины и направления векторов ![]() и
и ![]() , оба они
направлены стрелками к этой точке (рис. 4).
, оба они
направлены стрелками к этой точке (рис. 4).