Материал: Кинематический, силовой и динамический расчёт механизма качающегося конвейера
Для определения положений ускорений
центра масс звена 2 запишем соотношение
 . (1.14)
. (1.14)
Отложив от точки ![]() плана
ускорений отрезок
плана
ускорений отрезок ![]() на линии
действия вектора
на линии
действия вектора ![]() и соединив
точку
и соединив
точку ![]() с полюсом
плана скоростей, получим вектор ускорения точки
с полюсом
плана скоростей, получим вектор ускорения точки ![]() .
.
Для определения ускорения точки F запишем
векторное уравнение
![]() , (1.15)
, (1.15)
где ![]() - относительное ускорение точки, оно
направлено параллельно СF.
- относительное ускорение точки, оно
направлено параллельно СF.
aС -ускорение
точки С , величину вектора определяем из соотношения
 (1.16)
(1.16)
и откладываем от полюса на линии
действия вектора ускорения точки В. Через конец этого отрезка проводим линию
действия вектора ![]() до
пересечения с линией, проведенной через полюс параллельно направляющей.
Получаем искомый вектор
до
пересечения с линией, проведенной через полюс параллельно направляющей.
Получаем искомый вектор ![]() . В таблице
2 представлены значения всех ускорений звеньев для двух положений механизма.
. В таблице
2 представлены значения всех ускорений звеньев для двух положений механизма.
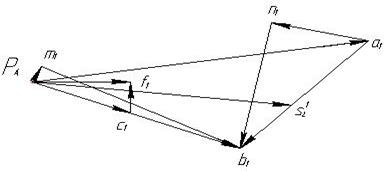
Рис. 4. Пример построения плана ускорений.
Pam - это
нормальное ускорение звена О2В; an- нормальное
ускорение звена АВ.
Таблица 2.
|
№ пол. |
1 |
2 |
|
aA, м/с2 |
22,45 |
22,45 |
|
aAB, м/с2 |
11,8625 |
13,7325 |
|
aB, м/с2 |
14,6575 |
13,75 |
|
aC, м/с2 |
6,9325 |
6,47 |
|
aCF, м/с2 |
2,415 |
0,6 |
|
aF, м/с2 |
6,495 |
6,4425 |
|
atAB, м/с2 |
9,8775 |
13,4675 |
|
anAB, м/с2 |
6,57 |
2,69 |
|
atBO2, м/с2 |
14,595 |
12,6775 |
|
anBO2, м/с2 |
1,33 |
5,33 |
.5 Кинематический расчёт
механизма методом кинематических диаграмм
Диаграмма перемещения выходного
звена или функция положения механизма строится в зависимости от функции
времени. Для построения и дальнейших расчетов выбираем масштабные коэффициенты
по оси абцисс
![]() ,
, ![]() .
.
На графике отрезок на оси абцисс
берем равным 180мм. Масштаб по оси ординат выбираем равным масштабу с разметки
кинематической схемы механизма
![]() .
.
После масштабных коэффициентов
приступаем к построению диаграммы перемещения точки F выходных
звеньев в системе координат S(t). Для этого
на оси абсцисс откладываем отрезок 0-12 равный 180мм. Затем делим отрезок на 12
частей и отмечаем точки 0, 1, 2,…, 12. Проводим ординатные прямые через эти
точки и на этих прямых с учетом выбранного масштаба, откладываем перемещения
точки F ,
определяемые по формуле
![]() =
=![]() , (1.17)
, (1.17)
где ![]() - перемещение точки F. Соединив
точки 0, 1,…, 12 плавной кривой, получим диаграмму перемещения точки F (рис. 5).
- перемещение точки F. Соединив
точки 0, 1,…, 12 плавной кривой, получим диаграмму перемещения точки F (рис. 5).
По результатам плана скоростей
строим кинематическую диаграмму скорости выходного звена, для этого c учетом
выбранного масштаба, откладываем скорости точки F,
определяемые по формуле
![]() =
=![]() ,
,![]() (1.18)
(1.18)
где ![]() - масштабный коэффициент, выбранный
на диаграмме скоростей по оси ординат.
- масштабный коэффициент, выбранный
на диаграмме скоростей по оси ординат.
Определив ![]() для
остальных положений строим график
для
остальных положений строим график ![]() . Порядок построения тот же, что и
при построении графика перемещений.
. Порядок построения тот же, что и
при построении графика перемещений.
Диаграмму ускорения точки F строим методом графического дифференцирования, способом хорд (рис. 6). Проводим хорду, которая соединяет концы начальной и конечной ординат кривой на данном интервале, на диаграмме скоростей. По оси абсцисс выбираем произвольную точку Н, в данном случае Н=20 мм в качестве полюса. Из этой точки проводим до пересечения с осью ординат луч, параллельный хорде.
Таким же образом рассмотрим все интервалы. В результате получим ряд точек, каждая из которых расположена в середине соответствующего интервала. Затем соединяем эти точки плавной кривой и получаем искомый график.
Масштабный коэффициент по оси
ординат определяется как [1]
![]() . (1.19)
. (1.19)
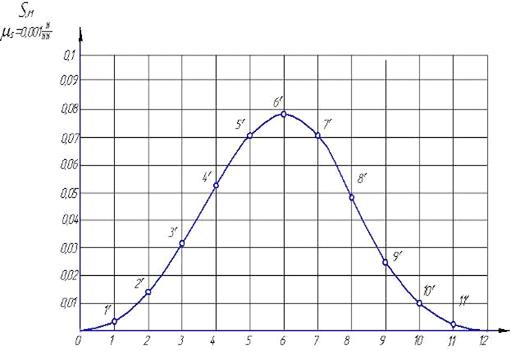
Рис. 5. Пример построения кинематической
диаграммы перемещений.
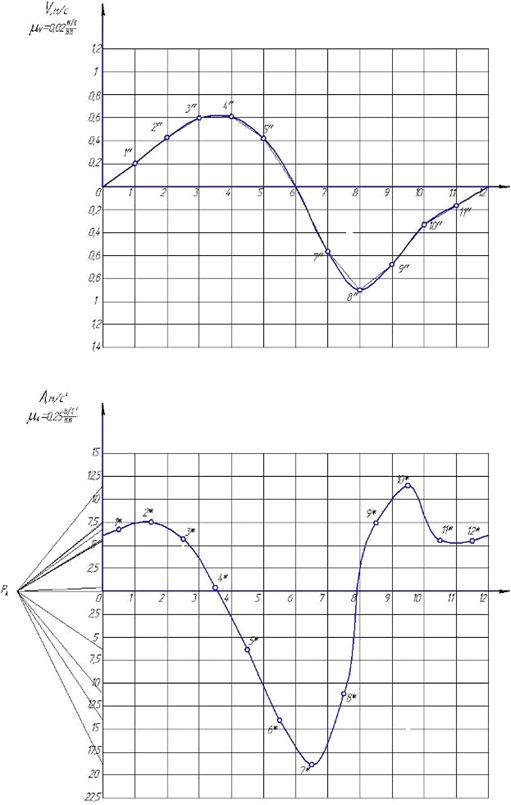
Рис. 6. Пример построения
кинематических диаграмм скорости и ускорения.
2. Динамический расчёт
механизма
Задачей данного раздела
курсового проекта является определение момента инерции маховика,
обеспечивающего заданную величину коэффициента неравномерности движения, и
построение графика угловой скорости вращения входного звена механизма в
установившемся режиме.
.1 Построение силовой диаграммы
и диаграммы сил полезного сопротивления
В задании имеем силовую
диаграмму, которую перенесем на лист (рис. 7).
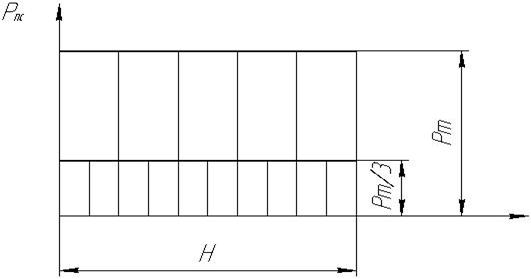
Рис. 7. Силовая диаграмма
Далее для графика сил полезного ![]() сопротивления
выберем систему координатных осей по оси абсцисс графика примем масштабные
коэффициенты равными
сопротивления
выберем систему координатных осей по оси абсцисс графика примем масштабные
коэффициенты равными
![]() ,
, ![]() .
.
На оси абсцисс откладываем отрезок
0-12 равный 180мм. Затем этот отрезок делим на 12 равных частей, каждая из
которых представляет собой отрезок, выражающий угол поворота кривошипа между
соседними его положениями и обозначим деления от 0 до 12. Вдоль оси ординат в
масштабе ![]() будем
откладывать отрезки выражающие значения силы полезного сопротивления Рm.
будем
откладывать отрезки выражающие значения силы полезного сопротивления Рm.
.2 Построение диаграммы приведённых
моментов сил
Приведенный момент силы полезного
сопротивления определим по формуле [2]
![]() , (2.1)
, (2.1)
где ![]() - скорость выходного звена,
соответствующая i-тому его положению,
- скорость выходного звена,
соответствующая i-тому его положению, ![]() - угловое
ускорение точки А,
- угловое
ускорение точки А, ![]() - сила
полезного сопротивления в i-том положении, Н.
- сила
полезного сопротивления в i-том положении, Н.
График момента строиться в системе
координат, осью абсцисс которой является угол поворота входного звена ![]() (рис. 8).
Величина масштабного коэффициента равна
(рис. 8).
Величина масштабного коэффициента равна ![]() .
.
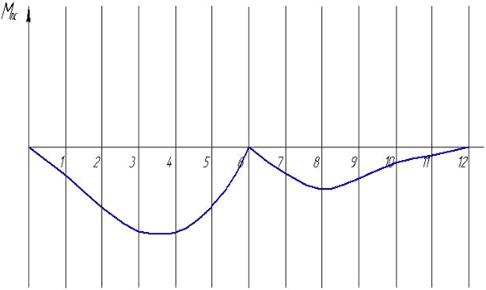
Рис. 8. Построение диаграммы приведённых
моментов сил.
2.3 Построение диаграмм работ
Диаграмма работы сил полезного
сопротивления располагается под графиком соответствующего приведенного момента.
С осью абсцисс, по которой откладывается величины угла поворота входного звена
в том же масштабе, что и на предыдущем графике ![]() . Этот график строиться по формуле
. Этот график строиться по формуле
![]() , (2.2)
, (2.2)
где ![]() - масштабный коэффициент
приведенного момента;
- масштабный коэффициент
приведенного момента; ![]() - масштабный
коэффициент будущей диаграммы работ по оси ординат,
- масштабный
коэффициент будущей диаграммы работ по оси ординат, ![]() - площадь на
интервале от 0 до 1, ограниченной осью абсцисс и диаграммой приведённых
моментов сил. В дальнейшем, на следующем участке, будет браться суммарная
площадь
- площадь на
интервале от 0 до 1, ограниченной осью абсцисс и диаграммой приведённых
моментов сил. В дальнейшем, на следующем участке, будет браться суммарная
площадь ![]() +
+![]() равная сумме
площадей взятая на интервале от 0 до 2 деления, где
равная сумме
площадей взятая на интервале от 0 до 2 деления, где ![]() - площадь на
интервале от 1 до 2, ограниченной осью абсцисс и диаграммой приведённых
моментов сил и далее аналогично для остальных интервалов. Найдя точки всех
интервалов работы полезного сопротивления, они соединяются кривой линей, после
чего соединяем точку на 12 интервале с точкой начала координат, получаем некий
отрезок, после отображаем получившийся отрезок в противоположную сторону
относительно оси абсцисс. Полученный отрезок и является диаграммой движущих
работ.
- площадь на
интервале от 1 до 2, ограниченной осью абсцисс и диаграммой приведённых
моментов сил и далее аналогично для остальных интервалов. Найдя точки всех
интервалов работы полезного сопротивления, они соединяются кривой линей, после
чего соединяем точку на 12 интервале с точкой начала координат, получаем некий
отрезок, после отображаем получившийся отрезок в противоположную сторону
относительно оси абсцисс. Полученный отрезок и является диаграммой движущих
работ.
.4 Определение избыточной работы
Так как указанные работы уже
определены и представлены в виде графиков, то технически определение избыточной
работы можно осуществить «переброской» наклонной прямой линии в область
графика, выражающего работу «меняющуюся по кривой». После такой операции
отрезки ординаты, заключенные между прямой и кривой в масштабе ![]() выразим
избыточную работу в каждом положении механизма. Теперь сведем эти ординаты в
отдельный график
выразим
избыточную работу в каждом положении механизма. Теперь сведем эти ординаты в
отдельный график ![]() представленный
на (рис. 9).
представленный
на (рис. 9).
Знак избыточной работы будет положительным если ее ордината располагается выше наклонной прямой, в противном случае избыточная работа имеет отрицательный знак.
конвейер кинематический инерция сопротивление
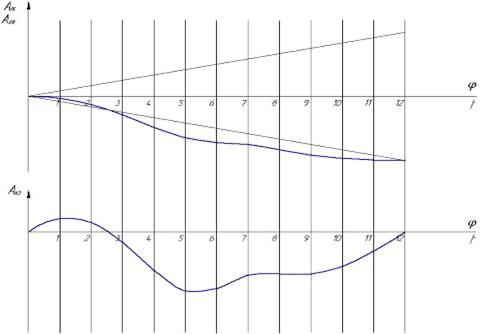
Рис. 9. Построение диаграмм работ сил
сопротивления и движущих сил, диаграммы избыточных работ.
.5 Определение приведенного момента инерции
механизма
Расчет приведенного момента инерции механизма
выполняется с помощью уравнения приведенного момента инерции механизма
 (2.3)
(2.3)
где ![]() - массы звеньев, кг;
- массы звеньев, кг;
![]() - скорости центра масс 2-го, 3-го
звена в определенном положении механизма, мс-1;
- скорости центра масс 2-го, 3-го
звена в определенном положении механизма, мс-1;
![]() - угловые скорости звена 2 и звена
3, с-1,
- угловые скорости звена 2 и звена
3, с-1,
![]() - скорость 5-го звена в
определенном положении, мс-1;
- скорость 5-го звена в
определенном положении, мс-1;
![]() - скорость выходного звена в
определенном положении, мс-1;
- скорость выходного звена в
определенном положении, мс-1;
![]() -моменты инерции 1-го, 2-го и 3-го
звеньев, кгм2;
-моменты инерции 1-го, 2-го и 3-го
звеньев, кгм2;
Результаты расчетов представлены в
таблице 2 и 3.
Таблица 2
|
|
|
|
|
|
8,15 |
12,23 |
3,058 |
30,58 |
|
|
|
|
|
|
1,7 |
0,7 |
0,2 |
16,75 |
Таблица 3
|
№ пол. |
|
|
|
|
|
|
|
|
1 |
5,7305 |
2,7982 |
0,734 |
0,2239 |
0,2239 |
0,2018 |
1,810334 |
|
2 |
3,6665 |
5,6012 |
1,0645 |
0,4481 |
0,4481 |
0,4274 |
1,819674 |
|
3 |
1,4525 |
7,5017 |
1,2938 |
0,6001 |
0,5982 |
1,852632 |
|
|
4 |
0,5845 |
7,7617 |
1,3265 |
0,6269 |
0,6269 |
0,6104 |
1,856938 |
|
5 |
2,9755 |
5,7547 |
1,0989 |
0,4604 |
0,4604 |
0,4202 |
1,811571 |
|
6 |
6,7 |
0 |
0,536 |
0 |
0 |
0 |
1,820346 |
|
7 |
9,865 |
7,7471 |
0,9055 |
0,6198 |
0,6198 |
0,5656 |
2,06521 |
|
8 |
7,62 |
11,3447 |
1,5468 |
0,9076 |
0,9076 |
0,9002 |
2,139329 |
|
9 |
1,0895 |
8,5147 |
1,4083 |
0,6864 |
0,6864 |
0,677 |
1,887885 |
|
10 |
3,7595 |
5,0212 |
1,0099 |
0,3538 |
0,3538 |
0,3313 |
1,82876 |
|
11 |
6,12 |
2,3017 |
0,6712 |
0,1841 |
0,1841 |
0,1618 |
1,815012 |
|
0,12 |
6,7 |
0 |
0,536 |
0 |
0 |
0 |
1,820346 |