Fuzzy Logic Behavior
of Quantum-Controlled Braitenberg
Vehicle Agents
Rebeca Araripe Furtado Cunha1,2, Naman Sharma1,3, Zeno To ano1,4(B),
and Fran¸cois Dubois5,6
1CentraleSup´elec, Universit´ ParisSaclay, 91190 Gif-sur-Yvette, France zeno.toffano@centralesupelec.fr, zeno.toffano@supelec.fr
2Federal University of Rio de Janeiro, Rio de Janeiro 21941-909, Brazil
3 National University of Singapore, Singapore 119077, Singapore
4 Laboratoire des Signaux et Syst`emes - CNRS (UMR8506), Gif-sur-Yvette, France 5 Conservatoire National des Arts et M´etiers, 75003 Paris, France francois.dubois@u-psud.fr
6 Association Fran¸caise de Science des Syst`emes (AFSCET), Paris, France
Abstract. The behavior of agents represented by Braitenberg vehicles is investigated in the context of the quantum robot paradigm. The agents are processed through quantum circuits with fuzzy inputs, this permits to enlarge the behavioral possibilities and the associated decisions for these simple vehicles. The logical formulation Eigenlogic, using quantum logical observables as propositions and eigenvalues as truth values is applied in this investigation. Fuzzy logic arises naturally in this formulation when considering input states that are not eigenvectors of the logical observables, the fuzzy membership being the quantum mean value of the logical observable on the input state. Computer simulations permits visualization of complex behaviors resulting from the multiple combination of quantum control gates. This allows the detection of new Braitenberg vehicle behavior patterns related to identified emotions and linked to quantum-like e ects.
Keywords: Quantum robots · Fuzzy logic · Quantum gates ·
Braitenberg vehicles · Emotion analysis
1 Introduction
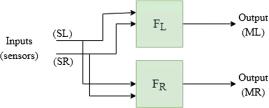
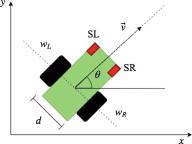
With the recent improvements in quantum information, interest has been growing in the area of quantum robotics. This signifies using concepts from quantum computing to build and conceptualize systems capable of decision making. Simple robots capable of showing complex behavior have been introduced in Valentino Braitenberg’s work on cybernetics proposing vehicle agents that show human-like emotions [1]. Here we aim to implement Braitenberg Vehicles (BV) using quantum-like circuits. Paul Benio who was the first to propose the idea
c Springer Nature Switzerland AG 2019
B. Coecke and A. Lambert-Mogiliansky (Eds.): QI 2018, LNCS 11690, pp. 111–122, 2019. https://doi.org/10.1007/978-3-030-35895-2_8