Материал: ЭиЭ 6.1 Электропривод
6 ОСНОВЫ ЭЛЕКТРОПРИВОДА И ЭЛЕКТРОСНАБЖЕНИЯ
6.1 Основы электропривода
6.1.1
Всостав электропривода входит:
1)электродвигатель, редуктор, управляющее устройство и рабочий механизм;
2)электродвигатель и редуктор;
3)электродвигатель и рабочий механизм;
4)электродвигатель и управляющее устройство.
6.1.2
n
n0
А
 Б
Б
 М
М
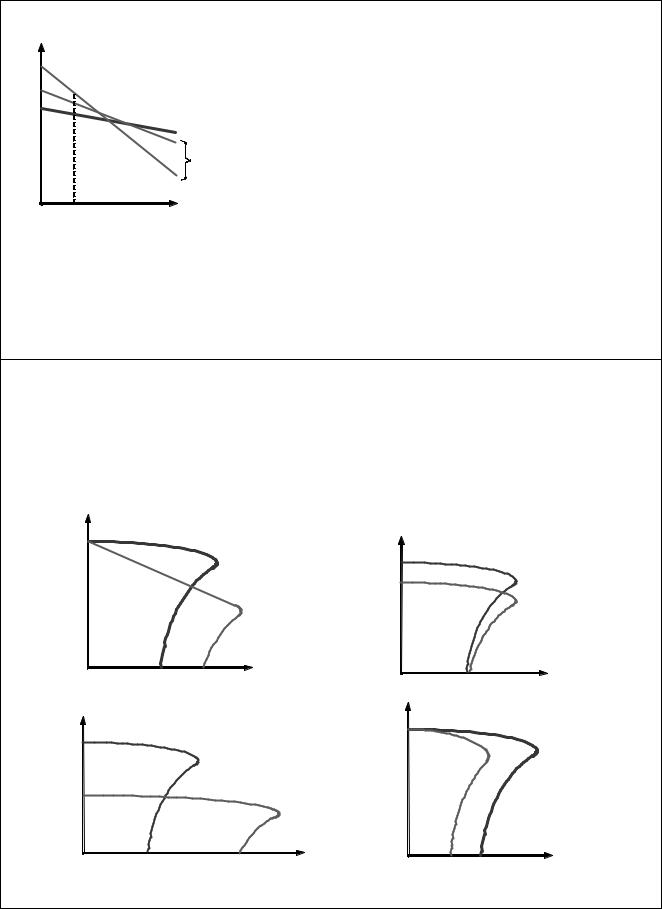
Если естественная механическая характеристика двигателя постоянного тока параллельного возбуждения – прямая А, то группе искусственных характеристик Б соответствует следующий способ регулирования частоты вращения ротора:
1)введением сопротивления в цепь обмотки возбуждения;
2)введением сопротивления в цепь якоря;
3)увеличением напряжения, подводимого к якорю;
4)уменьшением напряжения, подводимого к якорю.
6.1.3
n
n01
n02 А n03
 Б
Б
Если естественная механическая характеристика двигателя постоянного тока параллельного возбуждения – прямая А, то группе искусственных характеристик Б соответствует следующий способ регулирования частоты вращения
Мротора:
1)уменьшением напряжения, подводимого к якорю;
2)введением сопротивления в цепь обмотки возбуждения;
3)увеличением напряжения, подводимого к якорю;
4)введением сопротивления в цепь якоря.
34
6.1.4 |
|
|
n |
|
Если естественная механическая ха- |
n03 |
|
рактеристика двигателя постоянного |
n02 |
|
тока параллельного возбуждения – |
n01 |
А |
прямая А, то группе искусственных ха- |
|
|
рактеристик Б соответствует следую- |
Бщий способ регулирования частоты вращения ротора:
Mн M
1)уменьшением напряжения, подводимого к якорю;
2)введением сопротивления в цепь обмотки возбуждения;
3)увеличением напряжения, подводимого к якорю;
4)введением сопротивления в цепь якоря.
6.1.5
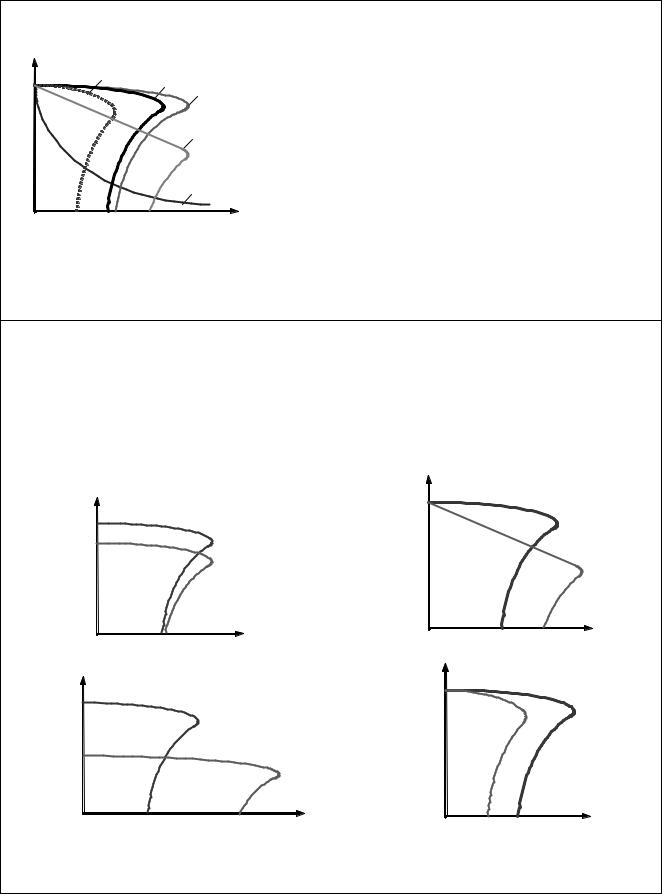
Если естественная механическая характеристика асинхронного двигателя изображена кривой “ а”, то при регулировании частоты вращения двигателя изменением частоты подводимого напряжения характеристика будет иметь вид кривой:
n |
|
|
|
n0 |
a |
n |
|
|
|
n01 |
а |
|
|
n02 |
|
1) |
M ; |
2) |
M ; |
n |
|
n |
a |
|
n0 |
||
n01 |
а |
|
|
n02 |
|
|
|
3) |
M ; 4) |
M . |
35
6.1.6 |
|
|
|
|
|
|
|
Если естественная механическая |
|
n |
1 |
|
характеристика асинхронного двигателя |
|
n0 |
а 2 |
изображена кривой “ а”, то при введении |
||
|
||||
|
|
|
добавочного сопротивления в цепь об- |
|
|
|
3 |
мотки ротора для регулирования частоты |
|
|
|
|
вращения характеристика будет иметь |
|
|
|
4 |
вид кривой: |
|
|
|
M |
1) 4; |
|
|
|
|
2) 2; |
|
|
|
|
3) 1; |
|
|
|
|
4) 3. |
6.1.7
Если естественная механическая характеристика асинхронного двигателя изображена кривой “ а”, то при регулировании частоты вращения двигателя переключением числа пар полюсов характеристика будет иметь вид кривой:
|
n |
|
n |
n0 |
a |
n01 |
а |
|
n02 |
|
|
1) |
M ; |
2) |
M ; |
n |
|
n |
a |
|
n0 |
||
n01 |
а |
|
|
n02 |
|
|
|
3) |
M ; |
4) |
M . |
36
6.1.8 |
|
|
|
|
|
|
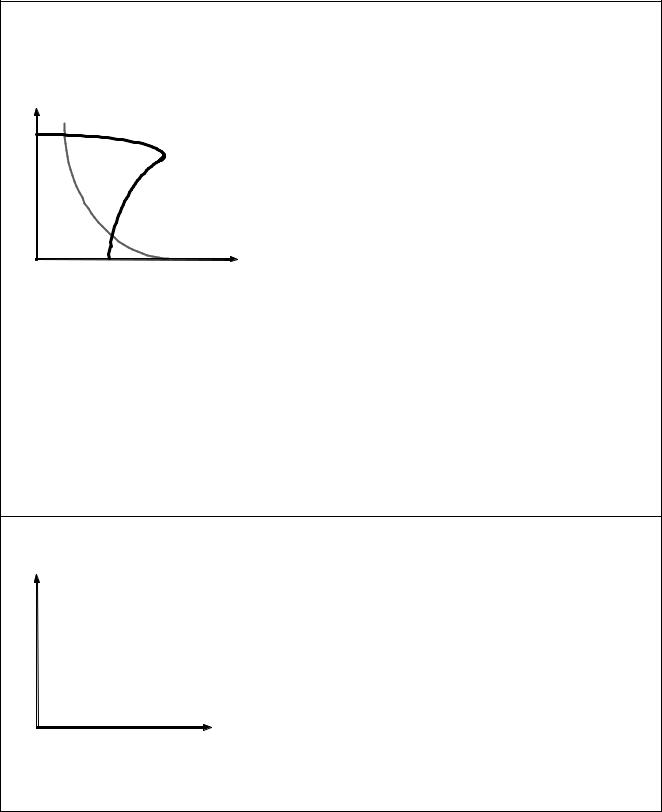
Если к асинхронному двигателю с ко- |
|
|
|
роткозамкнутым ротором, имеющим |
|
|
|
механическую характеристику А при- |
n |
|
|
соединен производственный механизм с |
Мном |
А |
|
механической характеристикой Б, то |
|
|
||
|
|
|
двигатель привести в движение меха- |
Б |
|
|
низм: |
|
|
|
|
|
|
|
1) не может, так как пусковой мо- |
|
|
|
мент двигателя меньше пусково- |
Мпуск |
|
M |
го момента механизма; |
|
|
|
2) может, так как момент механиз- |
|
|
|
ма равен моменту двигателя в |
|
|
|
рабочей части характеристики; |
|
|
|
3) может, так как пусковой момент |
|
|
|
механизма равен максимальному |
|
|
|
моменту двигателя; |
|
|
|
4) может, так как пусковой момент |
|
|
|
двигателя не зависит от пусково- |
|
|
|
го момента механизма. |
6.1.9
P
|
P2 |
||
P1 |
|
|
P4 |
|
|
|
|
|
|
|
|
|
|
P3 |
|
|
|
|
|
t
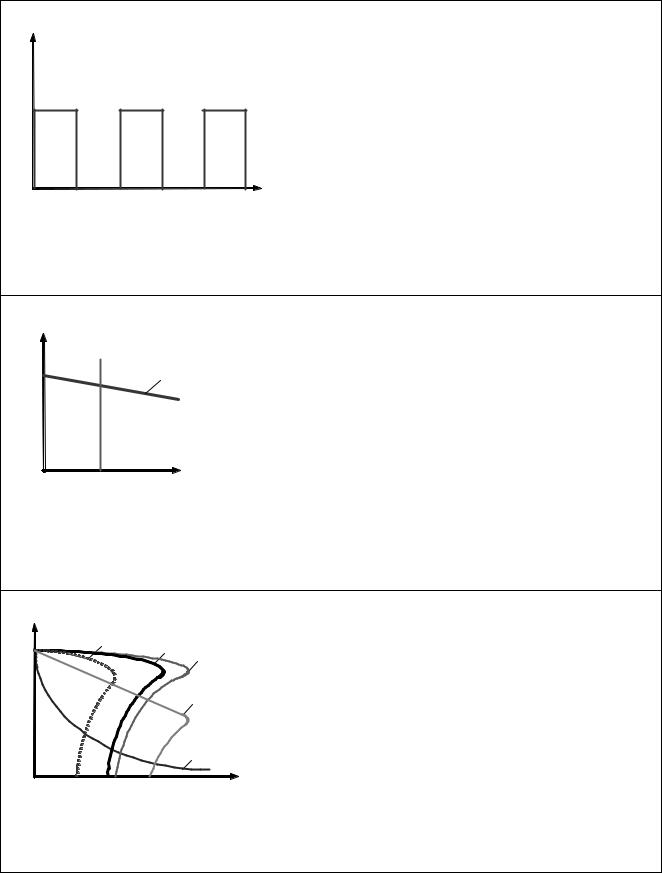
Для приведенного графика нагрузки следует выбирать двигатель из следующих условий работы:
1)повторно-кратковременный режим работы;
2)кратковременный режим работы;
3)длительный режим с переменной нагрузкой;
4)длительный режим с постоянной нагрузкой.
37
6.1.10 |
|
|
|
P |
|
|
Для приведенного графика нагрузки |
|
|
|
следует выбирать двигатель из следую- |
P |
P |
P |
щих условий работы: |
|
1)длительный режим с постоянной нагрузкой;
2)кратковременный режим работы;
3) длительный режим с переменной
tнагрузкой;
4)повторно-кратковременный режим работы.
6.1.11 |
|
|
|
n |
|
Если механическая характеристика дви- |
|
n0 |
М |
гателя (М), а механическая характери- |
|
стика рабочего механизма ( МС ), то в |
|||
|
|||
|
|
||
|
|
установившемся режиме двигатель ра- |
|
MС |
|
ботает при условии: |
|
1) |
M < M C ; |
M |
2) |
M = M C ; |
|
3)M > M C ;
4)M + M C = 0 .
6.1.12 |
|
|
|
|
n |
1 |
|
Если естественная механическая |
|
n0 |
а 2 |
характеристика асинхронного двигателя |
||
|
||||
|
|
|
изображена кривой “ а”, то для регулиро- |
|
|
|
3 |
вания частоты вращения ротора путем |
|
|
|
|
уменьшения подводимого напряжения- |
|
|
|
4 |
характеристика будет иметь вид кривой: |
|
|
|
M |
1) 4; |
|
|
|
|
2) 2; |
|
|
|
|
3) 1; |
|
|
|
|
4) 3. |
38