Материал: Динамические системы
2.2 Реализация диода Чуа с
использованием двух управляемых напряжением ПОС на ОУ
Операционные усилители (ОУ)
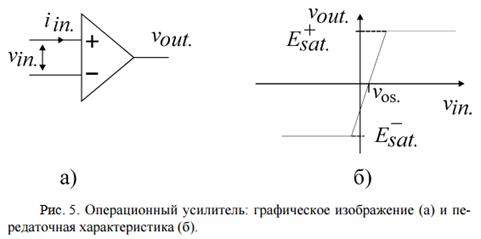
В реальных устройствах имеется некоторый рабочий диапазон, в котором можно говорить о соответствии поведения модели и реального прибора. Операционный усилитель - это электронный прибор, который в некотором диапазоне входных напряжений дает аппроксимацию источника напряжения, управляемого напряжением.
Рассмотрим цепь, показанную на Рис. 5а. Она
состоит из операционного усилителя и связанных с ним источников питания ![]() .
Напряжение, приложенное между неинвертирующим и инвертирующим входами
(обозначенными “+” и “-”), вырабатывает разность потенциалов между выходом и
опорным выводом (обычно общая точка источников питания). Этот реальный схемный
модуль с ОУ имеет небольшой входной ток
.
Напряжение, приложенное между неинвертирующим и инвертирующим входами
(обозначенными “+” и “-”), вырабатывает разность потенциалов между выходом и
опорным выводом (обычно общая точка источников питания). Этот реальный схемный
модуль с ОУ имеет небольшой входной ток ![]() ;
будем считать
;
будем считать ![]() . Когда
дифференциальное входное напряжение
. Когда
дифференциальное входное напряжение ![]() реального
ОУ достаточно велико по модулю и отрицательно, на выходе мы имеем практически
постоянное напряжение
реального
ОУ достаточно велико по модулю и отрицательно, на выходе мы имеем практически
постоянное напряжение ![]() ; эта область
называется областью отрицательного насыщения. Когда на входе небольшое
напряжение, то выходное напряжение изменяется почти линейно в зависимости от
входного; эта область называется линейной. Коэффициент усиления в линейной
области обычно превышает
; эта область
называется областью отрицательного насыщения. Когда на входе небольшое
напряжение, то выходное напряжение изменяется почти линейно в зависимости от
входного; эта область называется линейной. Коэффициент усиления в линейной
области обычно превышает ![]() . Кроме того,
характеристика отстоит от начала координат на входное напряжение смещения
. Кроме того,
характеристика отстоит от начала координат на входное напряжение смещения ![]() (оно
может быть отрицательным или положительным, присущим одному конкретному
устройству), которое обычно составляет несколько милливольт. Когда входное
напряжение велико и положительно, напряжение на выходе принимает максимальное
значение
(оно
может быть отрицательным или положительным, присущим одному конкретному
устройству), которое обычно составляет несколько милливольт. Когда входное
напряжение велико и положительно, напряжение на выходе принимает максимальное
значение ![]() ;
эта область называется областью положительного насыщения. Таким образом,
функция преобразования постоянного напряжения для реального ОУ хорошо
аппроксимируется трехсегментной кусочно-линейной характеристикой, как показано
на Рис. 5б.
;
эта область называется областью положительного насыщения. Таким образом,
функция преобразования постоянного напряжения для реального ОУ хорошо
аппроксимируется трехсегментной кусочно-линейной характеристикой, как показано
на Рис. 5б.
чуа диод преобразователь усилитель
Поскольку реальный ОУ содержит компенсирующие и паразитные емкости, полная модель устройства будет включать реактивные элементы. Однако, мы предположим, что ОУ ведет себя как резистор в диапазоне частот, в котором будет работать схема Чуа. Это всегда можно обеспечить соответствующим масштабированием времени, как это было показано ранее. Таким образом, мы пренебрегаем всеми частотно-зависимыми эффектами в ОУ и работаем с ним как с чисто активным устройством.
Можно предположить также, что выходной импеданс ОУ достаточно мал, так что им можно пренебречь.
Таким образом, в наших целях выход ОУ выглядит
как идеальный источник напряжения, а вход - как разрыв цепи. Поэтому мы можем
моделировать ОУ как УНИН: ![]() , где
, где ![]() имеет
вид, представленный на Рис. 5б.
имеет
вид, представленный на Рис. 5б.
Преимуществом данной кусочно-линейной модели является то, что мы теперь можем определить поведение цепи, содержащей ОУ и другие компоненты, анализируя каждый линейный участок работы (отрицательное насыщение, линейная область и положительное насыщение) отдельно.
Преобразователь отрицательного сопротивления (ПОС)
Существует множество путей для синтеза отрицательного сопротивления, один из которых состоит в подсоединении трех положительных линейных резисторов к управляемому напряжением источнику напряжения для формирования преобразователя отрицательного сопротивления. Это устройство привлекательно с экспериментальной точки зрения, поскольку легко осуществимо при помощи операционного усилителя (ОУ).
Иногда возникает необходимость использования
отрицательного сопротивления или источника напряжения с отрицательным
сопротивлением. По определению сопротивление R=+U/I, где направление тока и напряжения
совпадают. Если же в двухполюснике направления протекающего тока и приложенного
напряжения не совпадают, отношение U/I будет отрицательным. Говорят, что такой
двухполюсник обладает отрицательным сопротивлением. Отрицательные сопротивления
могут быть получены только с применением активных схем, которые называют
преобразователями отрицательного сопротивления (ПОС). Выходное напряжение
идеального ОУ определяется как ![]() .(10)
.(10)
Входной ток усилителя равен
![]() .(11)
.(11)
На входах идеального операционного усилителя
напряжения равны, т.е. ![]() , поэтому
, поэтому ![]() .
Отсюда следует, что
.
Отсюда следует, что ![]() .(12)
.(12)
При выводе этих соотношений предполагалось, что
схема находится в устойчивом состоянии. Однако, поскольку операционный
усилитель охвачен одновременно положительной и отрицательной обратными связями,
следует принять меры, чтобы выполнялись условия устойчивости. Физический смысл
условий устойчивости для схемы ПОС с идеальным ОУ при резистивных обратных
связях заключается в том, что глубина положительной обратной связи должна быть
меньше, чем отрицательной. Для схемы это означает, что сопротивление источника
входного сигнала ![]() должно быть меньше
должно быть меньше
![]() .
.
Рис. 6 - Схема преобразователя отрицательного
сопротивления
Реализация диода Чуа с использованием двух управляемых напряжением ПОС на ОУ
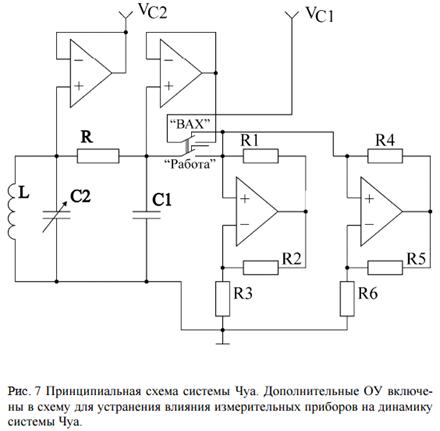
На Рис. 7 изображена реализация цепи Чуа на ОУ.
Нужная для диода Чуа ВАХ задается двумя управляемыми напряжением
преобразователями отрицательного сопротивления ![]() ,
соединенными параллельно.
,
соединенными параллельно.
Нелинейный резистор ![]() имеет
трехсегментную кусочно-линейную характеристику с наклонами
имеет
трехсегментную кусочно-линейную характеристику с наклонами ![]() ,
и точками излома
,
и точками излома ![]() . Точно так же у
. Точно так же у ![]() имеются
наклоны
имеются
наклоны ![]() ,
и точки излома
,
и точки излома ![]() . Составная
пятисегментная характеристика имеет наклоны
. Составная
пятисегментная характеристика имеет наклоны ![]() и
точки излома
и
точки излома ![]() и
и ![]() .
.
При обсуждении преобразователя отрицательного
сопротивления на ОУ мы увидели, что если положить ![]() ,
то будут наклоны
,
то будут наклоны ![]() , с точками излома
, с точками излома
![]() .
.
Таким образом, при ![]() ,
,
![]() .(13)
.(13)
Пологая ![]() ,
получаем следующее:
,
получаем следующее:
![]() .(14)
.(14)
Из графического рассмотрения составной
характеристики мы имеем:
![]() ,(15)
,(15)
![]()
С помощью данных наблюдений мы можем вывести
стратегию для определения подходящих значений компонентов ![]() из
из
![]()
Заключение
Система считается относительно устойчивой в определенных пределах, если при достаточно малых изменениях условий функционирования его поведение существенно не меняется. В курсовой работе исследована структурная устойчивость и устойчивость траектории поведения системы Чуа. Устойчивость данной системы обеспечивается такими аспектами самоорганизации, как дифференциация и лабильность (чувствительность). Дифференциация - это стремление системы к структурной и функциональной разнообразия элементов, которая обеспечивает не только условия возникновения и разрешения противоречий, но и определяет способность системы быстро приспосабливаться к имеющимся условиям существования. Больше разнообразия - больше устойчивости, и наоборот. Лабильность означает подвижность функций элементов при сохранении устойчивости структуры системы в целом.
Таким образом в ходе выполнения курсовой работы
доказана что устойчивость системы связана с ее стремлением к состоянию
равновесия, которое предполагает такое функционирование элементов системы, при
котором обеспечивается повышенная эффективность движения к целям развития. В
реальных условиях система не может полностью достичь состояния равновесия, хотя
и стремится к нему. Элементы системы функционируют по-разному в разных
условиях, и их динамическое взаимодействие постоянно влияет на движение
системы.
Список литературы
1. Афанасьев В.В., Логинов С.С., Польский Ю.Е. Восстановление параметров нелинейной динамической системы Чуа. Электронное приборостроение. Научно-практический сборник., Вып. 3 (41). Казань: КГТУ (КАИ). 2005 . С. 108-113.
2. Капранов М.В. Элементы теории систем фазовой синхронизации: учебное пособие по курсу «Теория колебаний». М.: Издательство МЭИ, 2006.-2008 с.
. Афанасьев В.В., Логинов С.С., Польский Ю.Е. Нелинейные системы с динамическим хаосом и порождаемые ими сигналы. Учебное пособие. Казань: Издательство Казань, ГТУ, 2005,123 с.
. Мацумото
Т. Хаос в электронных схемах.// ТИИЭР. - 2006. - Т.75, №8. - С.66-87.
Приложение
Исследование динамики системы Чуа обычно
проводится на модели с нелинейной характеристикой, включающей три линейных
сегмента с разным наклоном. Однако, при этом не учитываются свойства реальной
системы, для которой характерно наличие еще двух сегментов, что связано с
ограниченным динамическим диапазоном реальных операционных усилителей.
При математическом анализе обычно используют
систему уравнений в безразмерном виде:
Здесь переменные x,y,z пропорциональны соответственно напряжениям vC1, vC2 и току iL, соответственно. f(x) - это нормированная кусочно-линейная зависимость.
Управляющими параметрами являются
![]() и
и ![]() (16)
(16)
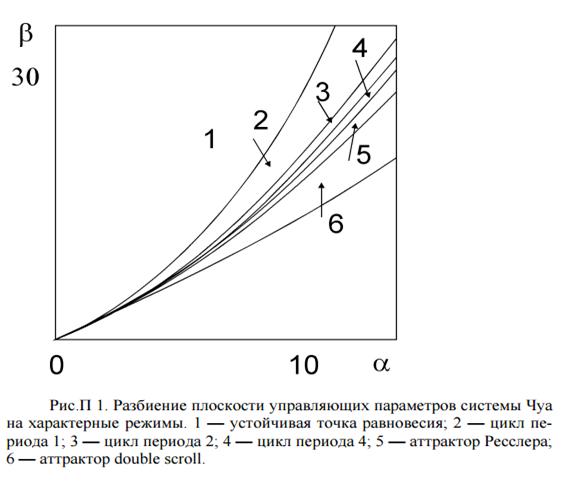
На рис.П1 приведено разбиение плоскости
управляющих параметров системы Чуа на характерные режимы. Цифрами на рисунке
обозначены области пространства параметров, в которых поведение системы
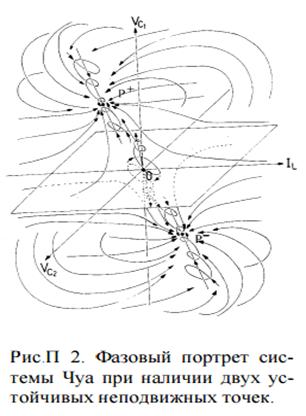
качественно различается. Когда параметр α мал,
в системе существуют два устойчивых положения равновесия P+, P- и одно
неустойчивое типа «седло», находящееся в начале координат 0. В этом случае
схема Чуа в зависимости от начальных условий может находиться в одном из двух
устойчивых положений равновесия (см. рис.П2).
Фазовый портрет на рис.П3 соответствует случаю,
когда параметры системы находятся в области 2 на рис.П1. В окрестности верхней
точки равновесия существует устойчивый предельный цикл периода 1, и
симметричный ему предельный цикл находится в окрестности нижней точки
равновесия. Кроме того, в системе существует также большой по размерам
устойчивый предельный цикл, охватывающий все пять сегментов характеристики
диода Чуа (жирная линия), и неустойчивый седловой предельный цикл (двойная
тонкая линия). Эти два цикла (устойчивый и неустойчивый) присутствуют на каждом
из приведенных фазовых портретов. В зависимости от начальных условий система
Чуа будет находиться на одном из трех устойчивых циклов.

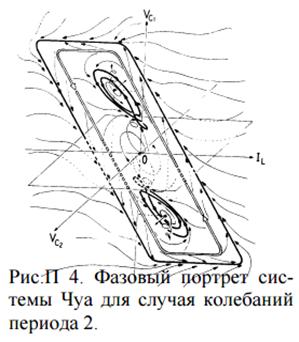
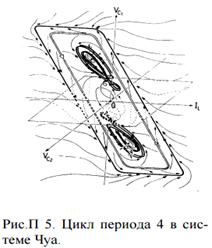
Фазовый портрет, представленный на рис.П4,
соответствует случаю, когда значения параметров схемы находятся в области 3 на
рис.П1. Линия, разделяющая области 2 и 3, называется линией бифуркации удвоения
периода и является границей, на которой происходит качественное изменение
структуры аттрактора системы Чуа. При переходе из области 2 в область 3 в
спектре мощности появляются субгармоники, соответствующие половинной частоте
предельного цикла, изображенного на рис.П3,а аттрактор изменяется и становится
« двухвитковым».
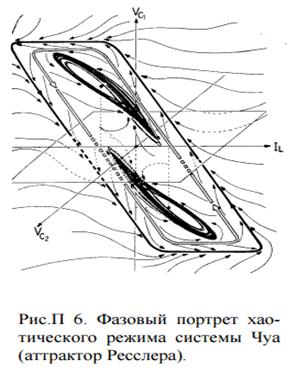
Два симметричных странных аттрактора, имеющихся
в системе при значениях параметров, соответствующих области 5, топологически
подобны аттрактору Ресслера, впервые исследованному на совершенно другой
системе нелинейных дифференциальных уравнений (см. рис.П6). Подобную
последовательность переходов в эксперименте можно наблюдать как при изменении
параметра R, так и при изменении параметра C.
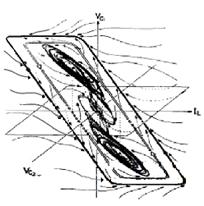
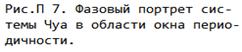
При дальнейшем изменении параметров в системе
можно наблюдать окна периодичности, подобные представленному на рис.П7. На
плоскости параметров (рис.П1) этому режиму колебаний соответствует узкая
область параметров внутри области 5.
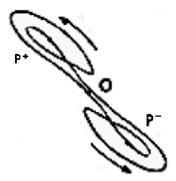
По мере дальнейшего увеличения параметра α
в
системе развивается аттрактор Ресслера (рис.П8), который, однако, все время
остается в пределах своего цикла и не заходит в область притяжения
симметричного аттрактора (область 5 на рис.П1). Таким образом, в системе
сосуществуют два странных аттрактора, и эволюцию сигнала на каждом из них можно
проследить, изменяя начальные условия в системе.
При дальнейшем увеличении управляющего параметра
два аттрактора Ресслера сталкиваются и образуют один общий странный аттрактор
(рис.П9), называемый double scroll. При этом типе поведения система посещает
окрестность и верхнего, и нижнего положения равновесия. Строгий математический
анализ сечения Пуанкаре показывает, что оно состоит из двух слоев точек,
напоминающих спираль. С этим и связано название этого странного аттрактора.
Внутри области существования аттрактора double scroll также существуют окна
периодичности, подобные тем, которые существовали в области аттрактора
Ресслера. Отличием их является то, что периодическая орбита в этом случае
охватывает оба положения равновесия (P+ и P-).