Материал: Динамические системы
Динамические системы
Содержание
Введение
Глава 1. Теоретическая часть
.1 Общие сведения о динамических системах
.2 Динамическая система Чуа
Глава 2. Практическая часть
.1 Математическая модель динамической системы Чуа
.2 Реализация диода Чуа с использованием двух управляемых напряжением ПОС на ОУ
Заключение
Список литературы
Приложение
Введение
Система Чуа - это простая электронная схема,
демонстрирующая целый ряд бифуркационных явлений и аттракторов. Система состоит
из двух конденсаторов, катушки индуктивности, линейного резистора и нелинейного
резистора (обычно называемого диодом Чуа). В курсовой работе экспериментально
исследуется хаотическое поведение системы Чуа, ставшей одной из канонических
схем, используемых для исследования нелинейных явлений. По утверждению автора
схемы, профессора Леона Чуа, широко известная теперь схема Чуа была придумана в
1983 г. После неудачного эксперимента с электронной моделью системы Лоренца.
Автору схемы пришла в голову мысль, что поскольку основной механизм, приводящий
к появлению хаоса в системах Лоренца и Ресслера - это наличие более чем одного
неустойчивого положения равновесия (три для Лоренца и два для Ресслера), то
можно придумать более простую систему, обладающую этими свойствами.
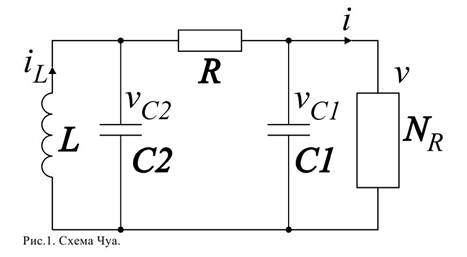
В результате получилась схема, изображенная на рис.1 - это простая колебательная система, демонстрирующая ряд бифуркаций и переход к хаосу.
Она содержит три линейных реактивных элемента
(катушка индуктивности и два конденсатора), один линейный резистор R и один
нелинейный резистор NR. Уравнение системы имеет вид:
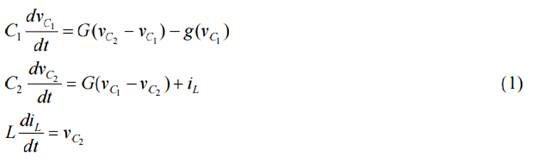
где G=1/R, а g(v) - это кусочно-линейная
функция, определенная как
![]()
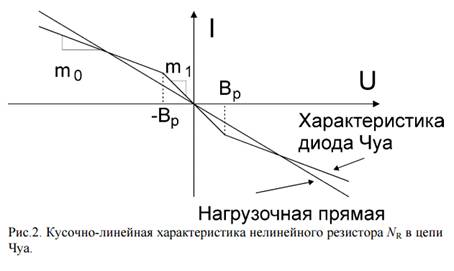
Это соотношение представлено графически на
рис.2; наклоны внутреннего и внешнего участков есть m0 и m1, соответственно;
±Bp обозначают точки излома. Сопротивление резистора NR, называемого диодом
Чуа, нелинейным образом зависит от напряжения на его выводах.
Глава 1. Теоретическая часть
.1 Общие сведения о динамических
системах
Первоначально термин динамическая система стал использоваться в механике. Под динамической системой понималась механическая система с конечным числом степеней свободы, описываемая системой обыкновенных дифференциальных уравнений.
Со временем круг управляемых объектов расширился и стал включать не только процессы с механическим движением, но также электрические, электромагнитные, тепловые, химические - словом, любые физические системы произвольной природы, состояния которых изменяются во времени. Но термин сохранился, поскольку сохранилась форма уравнений. При этом расширились понятия сопутствующих терминов - координатами стали называть не только геометрические координаты, но и значения всех физических показателей состояния, движением - не только геометрическое перемещение, но любой процесс изменения этих показателей.
В настоящее время, говоря о динамической системе, подразумевают:
систему обыкновенных дифференциальных уравнений
![]() = f(x), x
= f(x), x ![]() M
M
![]() Rn(3)
Rn(3)
относительно неизвестной вектор функции времени x=x(t), предполагая, что каждое решение данной системы определено при всех t≥0 - динамическая система с непрерывным временем (поток);
систему разностных уравнений
+1= f(xk), xk ![]() M
⊂
Rn,(4)
M
⊂
Rn,(4)
где (k=0,1,2,...) - динамическая система с дискретным временем (каскад).
При этом пространство Rn называют пространством состояний или фазовым пространством системы. Фазовое пространство системы - это совокупность всех допустимых состояний динамической системы. Аргументами входных и выходных сигналов системы могут служить время, пространственные координаты, а также некоторые переменные, используемые в преобразованиях Фурье, Лапласа и других. Таким образом, динамическая система характеризуется своим начальным состоянием и законом, по которому система переходит из начального состояния в другое.
Для задания динамической системы необходимо описать её фазовое пространство Rn, множество моментов времени T и некоторое правило, описывающее движение точек фазового пространства со временем. Множество моментов времени T может быть как интервалом вещественной прямой (тогда говорят, что время непрерывно), так и множеством целых или натуральных чисел (дискретное время). Во втором случае «движение» точки фазового пространства больше напоминает мгновенные «скачки» из одной точки в другую: траектория такой системы является не гладкой кривой, а просто множеством точек, и называется обычно орбитой. Тем не менее, несмотря на внешнее различие, между системами с непрерывным и дискретным временем имеется тесная связь: многие свойства являются общими для этих классов систем или легко переносятся с одного на другой.
Основное содержание теории динамических систем - это исследование кривых, определяемых дифференциальными уравнениями. Сюда входит разбиение фазового пространства на траектории и исследование предельного поведения этих траекторий: поиск и классификация положений равновесия, выделение притягивающих (аттракторы) и отталкивающих (репеллеры) множеств (многообразий).
Важнейшие понятия теории динамических систем - это устойчивость (способность системы сколь угодно долго оставаться около положения равновесия или на заданном многообразии) и грубость (сохранение свойств при малых изменениях структуры динамической системы).
Основные свойства динамических систем:
Целостность и членимость - указывает на то, что система должна быть делима на составные части (элементы, подсистемы), которые образуют, взаимодействуя друг с другом, единое целостное множество. При этом данное множество элементов должно быть совместимо, в смысле устойчивого функционирования всех элементов, образующих систему, на заданном интервале времени.
Второе свойство - наличие достаточно сильных и длительно действующих (устойчивых, стабильных) взаимных связей (отношений) между элементами или их свойствами. Причём сила этих внутренних связей должна быть заведомо больше, чем сила внешних связей этих же элементов с другими элементами, не входящими в данную систему и относящимся к её окружающей среде, что позволяет отличать систему от простой суммы (набора) элементов.
Упорядоченность (организация) системы указывает на объективное существование в ней упорядоченного (по определённым правилам и законам) распределения элементов и связей между ними в пространстве и времени.
Наличие интегративных качеств подразумевает, что в системе достигается такое качество (свойство), которое присуще системе в целом и не имеется ни у одного из её элементов в отдельности: свойство системы не определяется простой суммой свойств её отдельных элементов и связей между ними.
Любая система имеет цель функционирования. Под целью здесь понимается либо желаемое конечное состояние, либо желаемый конечный результат функционирования (движения, управления) системы, достижимый в пределах некоторого интервала времени.
Последнее свойство - достижение цели наилучшим образом с точки зрения экономии ресурсов, быстродействия или качества.
Динамические системы, также как и другие объекты, модели и т.д., можно классифицировать по различным признакам. В данном случае классификация динамических систем будет осуществляться в зависимости от идеализации, принятой при их математическом описании. Динамические системы по этому признаку подразделяются на следующие классы.
Линейные и нелинейные системы. Предположим, что
при воздействии на вход системы каждого из сигналов ![]() отдельно,
выходные сигналы системы соответственно равны
отдельно,
выходные сигналы системы соответственно равны ![]() Пусть
Пусть
![]() =F{
=F{![]() },
}, ![]() F{...}-
некоторый оператор преобразования.
F{...}-
некоторый оператор преобразования.
Линейной системой называется система, для которой выполняется принцип суперпозиции:
при воздействии на вход суммы сигналов, выходной сигнал является суммой реакций системы на каждый из входных сигналов отдельно;
изменение амплитуды входного сигнала в несколько раз приводит к такому же изменению амплитуды выходного сигнала.
Аналитически эти условия можно выразить следующим образом:
![]() =
= ![]() =
=
![]() (5)
(5)
где ![]() -
произвольные константы, F - некоторый оператор преобразования.
-
произвольные константы, F - некоторый оператор преобразования.
Динамическая система называется нелинейной динамической системой (или просто нелинейной системой), если векторное дифференциальное уравнение для состояний системы x(t) есть нелинейное дифференциальное уравнение или если выходная реакция y(t) есть нелинейная функция от переменных величин x(t) и u(t), то есть принцип суперпозиции не выполняется.
Реальные системы практически всегда нелинейны. Это связано с обилием факторов, которые влияют на них; и среди них всегда найдутся те, при влиянии которых не будет выполняться принцип суперпозиции. В определенных условиях (учет небольшого числа выбранных факторов, рассмотрение процессов в некоторой малой окрестности выбранных точек и ряд других) реальные системы могут рассматриваться как линейные системы. В этих случаях линейная модель будет описывать все наиболее существенные качественные и количественные характеристики рассматриваемой системы, и модель будет существенно более простой и удобной для исследований.
Стационарные и нестационарные системы
Стационарной системой называется система, параметры которой неизменны во времени.
Для стационарных систем характерно то, что сдвиг во времени входного сигнала приводит к такому же сдвигу во времени выходного сигнала.
{u (t - t0)} = y(t - t0) (6)
Форма выходного сигнала при этом не изменяется. Иначе говоря, система инвариантна к сдвигу во времени входного сигнала.
Нестационарной системой называется система, параметры которой зависят от времени. В нестационарных системах вышеприведенное условие (6) не выполняется.
Примером стационарной системы является, космический аппарат, находящийся на круговой орбите вокруг Земли, или космическая ракета на этапе взлета, когда интенсивно расходуется топливо.
Аналоговые дискретные системы
Аналоговой (непрерывной) системой называется система, в которой циркулируют непрерывные во времени информационные сигналы.
Дискретной системой называется система, в которой на всех или на некоторых участках системы используются дискретные во времени информационные сигналы.
Аналоговый сигнал является непрерывной функцией времени. Цифровой сигнал может принимать лишь определенное число дискретных значений в дискретные моменты времени.
Примером аналоговой системы является автомобиль, движущийся по дороге, если учитывать только координаты его местоположения. Примером дискретной системы является любой компьютер.
Скалярные и векторные системы
Скалярной динамической системой называется линейная стационарная модель конечномерной динамической системы с одним входом и одним выходом.
Векторной (матричной) динамической системой называется система, в которой входной и (или) выходной сигналы - векторные величины, т.е. в векторной системе возможно несколько входов и (или) несколько выходов.
Примерами скалярных систем являются утюг (одно входное воздействие - электрическое напряжение, одна выходная величина - температура рабочей поверхности утюга), электронный усилитель (одно входное усиливаемое напряжение, одно выходное усиленное напряжение).
Примерами матричных систем являются, например, автопилот самолета (несколько входных и выходных сигналов), робот (несколько входных сигналов, три пространственные координаты руки робота).
Динамическая система Чуа - простейшая
электрическая цепь, демонстрирующая режимы хаотических колебаний. Была
предложена профессором Калифорнийского университета L.Chua, T.Matsumoto и др. в
1984г. Эта система была исследована и использована в качестве модели в
множестве работ различных авторов. Система Чуа описывает динамику типичных
радиотехнических устройств с динамическим хаосом, которые нашли уже настолько
широкое применение, что начат их выпуск в виде специализированных микросхем.

Рис. 3.
Бифуркационная диаграмма режимов при m0=-8/7,m1=-5/7.
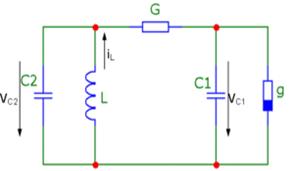
Рис. 4 - Система Чуа. L,G,C1,C2-пассивные
элементы, g-диод Чуа. В классическом варианте предлагаются следующие значения
элементов: L=1/7Гн;G=0.7См;C1=1/9Ф;C2=1Ф
Динамическая система состоит из двух
конденсаторов, катушки индуктивности, линейного резистора и нелинейного
резистора (обычно называемого диодом Чуа).
Глава 2. Практическая часть
.1 Математическая модель
динамической системы Чуа
Мацумото с соавторами с помощью компьютерного
моделирования соотношений (1) показал, что аттрактор типа “double scroll”
появляется в цепи Чуа при следующих значениях параметров:
![]() (7)
(7)
В этих и более ранних примерах моделирования
единицы измерения не приводились (не были необходимы) для переменных состояния ![]() ,
поскольку Мацумото просто моделировал набор дифференциальных уравнений. Если мы
перепишем уравнение в единицах СИ, то напряжения будут измеряться в вольтах
(В), токи в амперах (А), емкость в фарадах (Ф), индуктивность в генри (Г),
сопротивление в омах (Ом); величина, обратная сопротивлению и называемая
проводимостью, измеряется в сименсах (См). Поскольку в электронных цепях легче
реализовать токи порядка миллиампер, чем ампер, то первым шагом является
уменьшение всех токов в 1000 раз, что ведет к уменьшению всех емкостей в 1000
раз и увеличению сопротивлений и индуктивностей во столько же раз. Таким
образом, при
,
поскольку Мацумото просто моделировал набор дифференциальных уравнений. Если мы
перепишем уравнение в единицах СИ, то напряжения будут измеряться в вольтах
(В), токи в амперах (А), емкость в фарадах (Ф), индуктивность в генри (Г),
сопротивление в омах (Ом); величина, обратная сопротивлению и называемая
проводимостью, измеряется в сименсах (См). Поскольку в электронных цепях легче
реализовать токи порядка миллиампер, чем ампер, то первым шагом является
уменьшение всех токов в 1000 раз, что ведет к уменьшению всех емкостей в 1000
раз и увеличению сопротивлений и индуктивностей во столько же раз. Таким
образом, при ![]() , измеряемых в
вольтах и
, измеряемых в
вольтах и ![]() , измеряемом в миллиамперах,
набор параметров Мацумото принимает вид:
, измеряемом в миллиамперах,
набор параметров Мацумото принимает вид:
 (8)
(8)
Наклоны кусочно-линейной характеристики
резистора составляют теперь -0.8 мСм (мА/В) и -0.5 мСм; точки излома остаются
неизменными при ![]() .
.
Проще использовать емкости в нанофарадах и
индуктивности в миллигенри, чем фарады и генри. Эффект перемасштабирования
времени в k раз проявляется в умножении каждой индуктивности и емкости на тот
же множитель k; на величины резисторов изменение масштаба времени не влияет. В
частности, замедление времени в ![]() раз уменьшает
раз уменьшает ![]() во
столько же раз. Измененные параметры принимают следующий вид:
во
столько же раз. Измененные параметры принимают следующий вид:
 (9)
(9)
При перемасштабировании времени точки излома и
наклона кусочно-линейного резистора ![]() не
изменяются. Выберем номиналы реальных элементов равными 18 мГн, 10 нФ, 100 нФ и
1800 Ом, близких к расчетным. Проведя масштабирование тока и времени, мы
конструируем диод Чуа: нелинейный резистор с вольт-амперной характеристикой.
Его важным свойством является то, что он обладает двумя отрицательными
наклонами
не
изменяются. Выберем номиналы реальных элементов равными 18 мГн, 10 нФ, 100 нФ и
1800 Ом, близких к расчетным. Проведя масштабирование тока и времени, мы
конструируем диод Чуа: нелинейный резистор с вольт-амперной характеристикой.
Его важным свойством является то, что он обладает двумя отрицательными
наклонами ![]() .
.