Материал: Автоматизация производства спирта
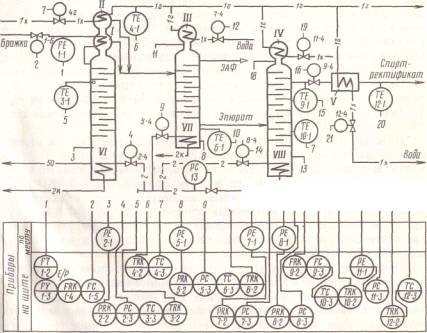
Рис. 10.13. Схема автоматизации трехколонной
установки косвенного действия
Температурный режим в эпюрационной колонне рассчитан на разделение спирта, который здесь является высококипящим компонентом смеси, и легколетучих примесей (эфиров, альдегидов, метанола и д.р.), которые концентрируются в верхней части колонне III и выходит из неё в виде эфироальдегидной фракции (ЭАФ).
Очищенный спирт концентрации 20-30% (эппюрат) выводится из нижней части эпюрационной колонны и подается в ректификационную колонну VIII для окончательной очистки и концентрирования. В этой колонне легколетучем компонентом является спирт, основным высококипящим- вода, поэтому концентрация спирта возрастает по высоте колонны. Обогрев этой колонны, как и двух других, производится глухим паром, который подается в кипятильник.
Спирт-ректификат концентрации 96% отбирается с 10-15 тарелок в верхней части колонны и проходит через теплообменник V , где охлаждается водой. Пары спирта выходят через верхнее отверстие и после конденсации в дефлегматоре IV возвращается в колонну в качестве флегмы. Из нижней части колонны отбираются сивушные масла,а ещё ниже отводится вода с остатками спирта.
Брагоректификационное отделение является взрывоопасным помещением, поэтому в нем допускается установка только приборов и средств автоматизации во взрывобезопасном исполнении. В системе автоматизации БРУ использованы преимущественно приборы пневматической ветви ГСП, в том числе вторичные приборы с пневмоприводом диаграммы. Нагрузка БРУ определяется расходом бражки, для регулирования которого служит система, состоящая из комплекта индукционного расходомера (1-1, 1-2),электропневмопреобразователя 1-3, вторичного прибора 1-4 с ПИ-регулятором 1-5 и регулирующего клапана 1-6.
Важным технологическим параметром , определяющим режим работы любой из колонн БРУ, является давление ее нижней части, которой зависит от расхода греющего пара в кипятильник. Для регулирования давления в схеме автоматизации БРУ использована однотипная система, которая состоит из датчиков давления 2-1,5-1,8-1, вторичных приборов 2-2, 5-2, 8-2, с П-регулятором 8-3 или ПИ -регуляторами 2-3, 5-3 и регулирующих клапанов 2-4, 5-4,8-4 на трубопроводах подачи пара в кипятильник соответствующей колонны.
Основным параметром, характеризующим состояние процесса в каждой колонне, является концентрация солевого продукта (спирта) в основном технологическом потоке на выходе из аппарата. Из-за отсутствия серийных датчиков для автоматического измерения этого параметра его непосредственное регулирование невозможно. Однако при постоянном давлении в колонне между концентрацией и температурой кипения жидкости на контрольной тарелке существует однозначная зависимость, которую можно использовать для косвенного регулирования концентрации.
В Бражной колонне температура на контрольной тарелке регулируется двухконтурной (каскадной) АСР. Температура измеряется манометрическим термометром 3-1, пневматический сигнал с выхода которого подается на вторичный прибор 3-2 с ПИ-регулятора 3-3. Сигнал этого регулятора поступает в качестве задания на регулятор 2-3 давления в нижней части колонны. При работе системы, если по каким-либо причинам концентрация спирта в верхней части колонны изменяется, например уменьшается, температура на контрольной тарелке снижается, становясь меньше заданной. Регулятор 3-3 увеличит заданное значение давления для регулятора 2-3 , которая окажется больше текущего значения давления в нижней части колонны. В результате увеличится расход пара в кипятильник и интенсифицируются процесс кипения, а так же все тепломассообменные процессы в колонне, что со временем приведёт к восстановлению требуемого режима ее работы.
Аналогичная по структуре АСР (6-1, 6-2, 6-3) применяется для стабилизации технологического режима в эпюрационной колонне. Отличие состоит в том, что в данной АСР регулируется температура в нижней части колонны, откуда отбирается целевой продукт ( эппюрат). Особенно высокие требования предъявляются качеству регулирования концентрации спирта, отбираемого из ректификационной колонны, поскольку он является конечным продуктом производства. Для этого служит двухконтурная( каскадная) АСР, которая регулирует расход спирта ректификата с коррекции по температуре на контрольной тарелке. Датчиком расхода является ротаметр 9-1, пневматический выходной сигнал которого подается на вторичный прибор 9-2 с П-регулятором 9-3 и далее на регулирующий клапан 9-4.
Температура на контрольной тарелке измеряется манометрическим термометром 10-1, пневмосигнал с которого поступает на вторичный прибор 10-2 с ПИ-регулятором 10-3. Сигнал с выхода этого регулятора подается в качестве задания на регулятор 9-4.
Схемы автоматизации БРУ предусмотрено регулирование расходов охлаждающей воды, подаваемые в дефлегматор всех колонн. При этом расход воды в дефлегматор бражной колонны обеспечивает стабилизацию температуру отходящей нагретой воды (4-1-4-4). В эпюрационной и ректификационной колоннах применены однотипные системы регулирования давления в верхней части колонны, которые состоят из датчиков 7-1 и 11-1, вторичных приборов 7-2и 11-2 с ПИ-регуляторами 7-3 и 11-3 и клапанами 7-4 и 11-4, регулирующими подачу охлаждающей воды в дефлегматор соответствующей колонны.
На ряду со стабилизацией основных
технологических параметров брагоректификации системы автоматизации БРУ
обеспечивает регулирование и давление пара в коллекторе с помощью регулятора 13
прямого действия «после себя», а так же температуры спирта ректификата после
теплообменника V (12-1-12-4). Измерение и учет объема спирта, получаемого из
БРУ, а так же содержания в нем чистого алкоголя производится с помощью
специального устройства, называемого контрольным снарядом.
2. Технические средства автоматизации
.1 Средства измерений и их характеристики
Измерение, т. е. нахождение значения физической величины опытным путем, осуществляется с помощью специальных устройств - средств измерений. Основными видами средств измерений являются измерительные преобразователи и измерительные приборы.
Измерительные преобразователи (датчики)
предназначены для получения сигнала измерительной информации, удобной для
передачи, обработки и хранения, но не поддающейся непосредственному восприятию
наблюдателем; измерительные приборы для получения сигнала измерительной
информации в форме, доступной для непосредственного восприятия наблюдателем.
.2 Погрешности средств измерений
Средства измерений могут быть с успехом
использованы лишь только тогда, когда известны их метрологические свойства.
Специфической метрологической характеристикой средств измерений является их
погрешность. Разность между показанием прибора Xn и истинным (или
действительным) значением измеряемой величины х называется абсолютной
погрешностью средств измерений ∆X:
∆X=Xn-X.(1.1)
Отношение абсолютной погрешности измерительного прибора к истинному значению измеряемой им величины называется относительной погрешностью и выражается в долях или процентах измеряемой величины. Относительная погрешность используется в качестве одной из характеристик точности средства измерений. Величина, равная значению абсолютной погрешности и противоположная ей по знаку, называется поправкой:
=X-Xn.(1.2)
Метрологической характеристикой точности большинства технических средств измерений являются пределы основной и дополнительных погрешностей. Основной погрешностью называется погрешность средств измерений, используемых в нормальных условиях, определяемых ГОСТами или другими техническими условиями на средства измерений.
Дополнительной погрешностью называется погрешность средства измерений, вызываемая воздействием на него условий при отклонении их действительных значений от нормальных (нормативных) или при выходе за пределы нормальной области значений.
Класс точности средств измерений, являющийся их обобщенной метрологической характеристикой, определяется пределами допускаемых основной и дополнительной погрешностей. Конкретные классы точности устанавливаются в стандартах на отдельные виды средств измерений. Чем меньше число, обозначающее класс точности, тем меньше пределы допускаемых погрешностей.
Любое средство измерений и каждый из его элементов могут выполнять свои функции лишь в том случае, когда их выходные (Хвых) и входные (хвх) величины связаны между собой устойчивыми зависимостями в различных режимах работы. Различают два основных режима работы измерительных устройств - статический (установившийся) и динамический (неустановившийся). Оба режима преобразования входной величины в выходную определяются соответственно статическими и динамическими характеристиками. Знание статических и динамических характеристик средств измерений и их элементов наряду с показателями, характеризующими погрешности, имеет большое значение как при собственно измерениях, так и особенно при использовании их в качестве датчиков в системах автоматического регулирования и управления.
Статической характеристикой средства измерений называется функциональная зависимость между выходной и входной величинами в установившихся режимах работы, т. е.
вых=f(Xвх) (1.3)
Динамической характеристикой средства измерений и их элементов называется функциональная зависимость между их выходной и входной величинами в динамических условиях преобразования, т. е. в переходных режимах, когда статические зависимости нарушаются в силу присущих всем средствам измерений инерционных свойств разного рода и вида (инерция движущихся масс, частей, теплопроводность и т. п.).
К первой группе приборов и устройств ГСП относятся первичные измерительные преобразователи (датчики), измерительные приборы и устройства, которые вместе с нормирующими устройствами, формирующими унифицированный сигнал, образуют группу устройств получения измерительной информации. В связи с большим разнообразием контролируемых и измеряемых параметров, а также огромным количеством конструктивных исполнений измерительных устройств номенклатура средств этой группы является самой многочисленной.
Во вторую группу, входят различные преобразователи сигналов и кодов, коммутаторы измерительных цепей, шифраторы и дешифраторы, согласовательные устройства, а также устройства дистанционной передачи, телеизмерения, телесигнализации и телеуправления.
В третью группу устройств, называемую центральной частью ГСП, входят технические средства, предназначенные для формальной и содержательной обработки измерительной информации и формирования управляющих воздействий: анализаторы сигналов, функциональные и операционные преобразователи, логические устройства, запоминающие устройства, автоматические регуляторы, задатчики всех типов, а также управляющие вычислительные машины и устройства.,, в том числе микропроцессоры, микро- и мини ЭВМ и др. В функциональном отношении эта группа устройств является самой сложной, поскольку они реализуют все алгоритмы автоматического регулирования и управления: от простейших задач стабилизации до автоматизации управления предприятиями или даже целыми отраслями. Устройства четвертой группы (исполнительные устройства) - это электрические, пневматические, гидравлические или комбинированные исполнительные механизмы, усилители мощности, позиционеры и некоторые вспомогательные устройства к ним, а также различные регулирующие органы, которые могут в ряде случаев являться составной частью основного технологического оборудования.
Дальнейшим развитием системы ГСП являются
агрегатные комплексы (АК), создаваемые на основе технических средств, входящих
в отдельные функциональные группы ГСП, и предназначенные для самостоятельного
применения в соответствии с их спецификой.
3. Измерительные преобразователи и приборы для
измерения параметров состояния сред
Измерительные преобразователи и приборы этой группы предназначены для получения измерительной информации о таких физических величинах, как температура, давление, расход, уровень и др., которые характеризуют состояние разных технологических сред (твердых, жидких, газообразных), а также машин и агрегатов и их отдельных элементов, деталей и узлов.
Измерение указанных параметров и представление
информации об их значениях и изменениях являются абсолютно необходимыми на всех
стадиях протекания любых технологических процессов. Ни один технологический
процесс не может управляться ни вручную, ни автоматически без получения такой
информации с помощью соответствующих технических средств измерений, основанных
на использовании различных методов измерений и способов получения результатов
измерений.
.1 Измерение температуры
Температура является одним из важнейших параметров, характеризующих многие процессы пищевой технологии. Для измерения температуры применяется большое количество средств измерения, называемых термометрами.
Термометры расширения. Действие термометров расширения основано на использовании зависимости удельного объема вещества от температуры измеряемой среды, в которую оно помещено.
Жидкостные термометры. Измерение температуры
жидкостными термометрами расширения основано на различии коэффициентов
объемного расширения материала оболочки термометра и жидкости, заключенной в
ней. Оболочка термометров изготовляется из специальных термометрических сортов
стекла с малым коэффициентом расширения. Пределы измерения стеклянных
термометров от -200 до +750 "С.
.2 Автоматическое регулирование
Автоматические регуляторы, исполнительные механизмы и регулирующие органы.
Всякая автоматическая система регулирования (АСР) состоит из совокупности объекта регулирования (ОР), измерительного устройства (ИУ), автоматического регулятора (АР), исполнительного механизма (ИМ) и регулирующего органа (РО).
Автоматический регулятор представляет собой устройство, предназначенное для преобразования сигнала от измерительного устройства в соответствии с заданным алгоритмом (законом) управления и усиления его до значений, необходимых для управления исполнительным механизмом, воздействующим через регулирующий орган на объект управления.
По способу действия АР подразделяются на
регуляторы прямого и непрямого (косвенного) действия. В регуляторах прямого
действия энергия для их работы поступает от самого объекта автоматизации. В
регуляторах непрямого действия энергия к их элементам подводится от внешнего
источника, что позволяет развивать достаточно большие динамические усилия при
перемещении регулирующих органов и обеспечивает возможность территориального
разделения объекта, автоматического регулятора и исполнительного механизма с
регулирующим органом. Кроме того, регуляторы косвенного действия обладают более
высокими быстродействием и точностью.
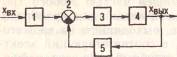
Структурная схема автоматического регулятора.
По виду подводимой энергии регуляторы подразделяются на электрические, пневматические, гидравлические и комбинированные. Одной из основных характеристик регуляторов является закон регулирования. Современные регуляторы косвенного действия представляют собой устройства, состоящие из нескольких структурных элементов, основными из которых являются многоступенчатые усилители, сумматоры, модуляторы, умножители и другие блоки, с помощью которых обеспечивается построение схем, обусловливающих формирование регулирующего воздействия в соответствии с алгоритмом управления.
Электрические автоматические регуляторы (автоматические регулирующие блоки), структурная схема которых приведена на рис. 4.1, предназначены для формирования выходного сигнала, подаваемого к электрическому исполнительному механизму АСР.
Автоматический регулятор состоит из узла входных
цепей 1, к которому подводятся сигналы от измерительных преобразователей. Далее
преобразованные сигналы поступают к сумматору 2, к которому также подводится
сигнал, сформированный узлом обратной связи 5. Разность между сигналом обратной
связи и сигналом от измерительного преобразователя подается к суммирующему
усилителю 3 и далее к узлу 4, с помощью которого формируется управляющий сигнал
в соответствии с законом регулирования. Настройки вводятся в регулятор при
наладке АСР конкретного объекта автоматизации через узел входных цепей 1.