|
 =2.43 =2.43
|
|
|
|
|
|
|
|
|
Розвиток технічних засобів, поява нових, більш
досконалих систем збору, передачі та обробки інформації дуже впливають на
структуру диспетчерського управління, дають можливість створювати
децентралізовані системи управління, дозволяють вирішувати більш складні
завдання контролю, оптимального управління і регулювання. Практично з розробкою
нових поколінь технічних засобів виникають нові види АСУТП.
Разом з тим комплектування АСУТП водопостачання
апаратурою контролю та управління зустрічає великі труднощі. Недостатній випуск
сучасних мікропроцесорних пристроїв телемеханіки та обчислювальної техніки. Ряд
необхідних для контролю датчиків потребує модернізації та заміни, деякі види
приладів і пристроїв не випускаються промисловістю. Складність і вартість
технічних засобів постійно зростають.
У цих умовах при проектуванні комплексу технічних
засобів АСУТП діючих систем водопостачання необхідно брати до уваги наявні на
спорудах пристрої контролю та управління і забезпечувати можливість їх
використання в АСУТП.
Нижче розглядаються основні види технічних
засобів АСУТП подачі та розподілу води.
4.2 Датчики
Для отримання інформації про технологічні
параметри споруд подачі та розподілу води використовуються датчики державної
системи приладів (ДСП), що мають стандартизований електричний вихід 0- 5 мА. В
АСУТП ПРВ застосовуються такі групи приладів:
датчики для вимірювання тиску і перепаду
тисків,
датчики для вимірювання витрати води,
датчики рівня води в резервуарах.
датчики для контролю струму, напруги та
електричної потужності (активної і реактивної).
Промисловість випускає кілька типів датчиків
тиску. Найбільш переважно застосування датчиків тиску типу МПЧ-VI, мають просту
і надійну конструкцію. Для виміру розрідження і тиску на всмоктуючих колекторах
насосних станцій встановлюються мановакуумметри типу МВПЧ - VI. Ці прилади
випускаються казанським заводом '' Теплоконтроль " і мають клас точності 1
або 1,5 (для різних меж вимірювань).
В останні роки з'явилися датчики тиску типу ''
Сапфір»; вони випускаються московським заводом '' Манометр», мають клас
точності 0,5, але відрізняються значно вищою вартістю. Для сигналізації
граничних значень тиску використовуються електроконтактні манометри типу ЕКМ-2.
Контроль витрат може здійснюватися за допомогою дифманометрів, індукційних або
ультразвукових витратомірів. Найбільшого поширення в АСУТП водопостачання
отримали дифманометри казанського заводу «Теплоконтроль» типу ДМЕР, які можуть
бути встановлені на трубопроводах будь-яких діаметрів мають клас точності 1,5.
Індукційні витратоміри випускаються для трубопроводів діаметром до 300 мм
(ІР-50) і характеризуються високою вартістю, а ультразвукові витратоміри ще не
знайшли широкого практичного застосування.
Слід зазначити, що проблему створення надійних
витратомірів для водопостачання не можна вважати вирішеною. Вимірювання рівня
води в резервуарах проводиться, як правило, за допомогою рівнемірів типу РУС,
що випускаються заводом '' Старорусспрібор «(м Стара Русса) і якi мають клас
точності до 2,5. Для вимірювання рівня можуть бути використані також буйкові
рівнеміри типу УБ-Е казанського заводу '' Теплоконтроль».
Для сигналізації граничних значень рівня води в
резервуарах може застосовуватися регулягор-сигналізатор рівня типу ЕРСУ-2 або
ЕРСУ-3. Прилад складається з трьох електродних датчиків і релейних блоку. Він
дозволяє контролювати чотири значення рівня (верхнє, нижнє, середнє і аварійне)
і може використовуватися як для телесигналізації рівня, так і для автономного
автоматичного управління додатковими механізмами (насосами, засувками).
В АСУТП водопостачання для контролю за роботою
електродвигунів насосів використовується ряд датчиків електричних параметрів, у
тому числі перетворювачі струму, перетворювачі напруги, а також датчики
активної та реактивної електроенергії. Контроль активної потужності
здійснюється, як правило, лічильниками типу САЗУ-І670Д, а реактивної потужності
- лічильниками типу СРЧУ-І673Д. Лічильники підключаються через вимірювальні
трансформатори і дають 1000 імпульсів на 1 кВт.
В цілому можна констатувати, що для АСУТП подачі
та розподілу води промисловість випускає всю необхідну гаму датчиків.
4.3 Апаратура збору та обробки інформації
Досвід проектування і впровадження АСУ ТП
водопостачання показав, що ефективність системи багато в чому залежить від
технічних і вартісних характеристик апаратури збору та обробки інформації. З
урахуванням функцій АСУТП водопостачання та основних положень методичних
матеріалів з проектування автоматизації та диспетчеризації систем
водопостачання можна сформулювати такі основні вимоги до цієї апаратури:
. Надійність і відмовостійкість, що
забезпечуються як шляхом застосування надійних елементів (інтегральних
мікросхем з високим ступенем інтеграції), так і шляхом створення раціональної
структури, побудованої на принципах розподіленої обробки даних і резервування
найбільш важливих блоків і пристроїв.
. Можливість нарощування ємності системи, тобто
збільшення числа контрольованих об'єктів і споруд.
. Простота технічного обслуговування і ремонту
завдяки збільшенню модульності технічних засобів і застосування по можливості
однотипних блоків і пристроїв. Ремонт на місці повинен бути зведений до
мінімуму, замість нього повинна проводитися заміна пошкодженої плати або блоку
з подальшим ремонтом в цеху.
. Можливість виконання обчислювальних функцій:
накопичення і зберігання даних про хід технологічних процесів, розрахунок
техніко-економічних показників і оптімальлих режимів роботи водопровідних
споруд та ін. Забезпечення контролю як окремих параметрів (тиску в диктуючих
точках водопровідної мережі тощо), так і великих об'єктів (водопровідних
станцій, груп артезіанських свердловин і т.д.).
. Гнучкість при перебудові системи за рахунок
відмови від апаратної реалізації функцій і застосування програмованої логіки.
. Діяльність зв'язку між ЦДП і МДП до 30 км, між
МДП і операторськими пунктами (ОП) - до 3 км, між датчиками тиску в диктуючих
точках мережі і ЦДП - до 15-20 км, між датчиками на водопровідних спорудах і
концентраторами інформації - до 3 км.
. Можливість надання оператору-технологу ОП, а
також диспетчерам МДП і ЦДП оперативної інформації про хід технологічного
процесу в наочному вигляді та документування дій диспетчера (ведення журналу
експлуатації).
. Мінімальна вартість системи, яка задовольняє
вимогам до термінів окупності витрат на створення АСУ.
Особливо важливе значення має гнучкість структури
системи збору та обробки інформації та забезпечення її найкращою сумісності з
часом дуже складною організаційно-технологічної структурою системи
водопостачання. По суті це означає, що в такій складній багатофункціональної
розподіленої ієрархічній системі управління, якою є АСУТП водопостачання,
система збору та обробки інформації повинна мати змішану
централізовано-децентралізовану структуру. При цьому централізація контролю та
управління виправдана для територіально розосереджених об'єктів, що мають
невелику інформаційну ємність (диктуючи точки водопровідної мережі, насосні
станції підкачки, регульовані засувки на водопровідній мережі та ін.).
Для управління системами водопостачання складної
структури, що включають водозабори, насосні станції першого, другого і
наступних підйомів, очисні споруди, резервуари, багатозонну водопровідну мережу
та ін., Необхідно створювати децентралізовані розподілені системи збору та обробки
інформації, в яких відносно автономні системи нижнього рівня функціонують під
наглядом і управлінням системи вищого рівня. Ця остання, в свою чергу, може
бути пов'язана з керуючою системою більш високого рангу (зокрема, з АСОУ
водопостачання). Системи нижнього рівня територіально наближені до об'єктів
управління і являють оперативному персоналу необхідну інформацію про хід
технологічних процесів. Для цього кожна система нижнього рівня вирішує
функціонально повні для свого об'єкта комплекси задач контролю, регулювання,
управління, відображення інформації, отримуючи дані про обмеження при вирішенні
цих завдань від системи більш високого рівня.
Децентралізація повинна поєднуватися з модульним
принципом побудови системи. Рівнем типізації стає водопровідне господарство в
цілому, а окремі об'єкти: насосні станції першого і другого підйомів, очисні
споруди, групи артезіанських свердловин, станції підкачки, зони водопровідної
мережі та ін. Цим забезпечується можливість поетапного впровадження систем
доукомплектування та нарощування в процесі експлуатації АСУТП. Одночасно
істотно спрощується алгоритм функціонування системи в цілому, вирішується
проблема значного полегшення розробки та налагодження системного програмного
забезпечення, що для централізованих систем є одним з факторів, що гальмують
створення і впровадження АСУТП. Такі тенденції розвитку структури комплексу
технічних засобів АСУТП.
Вибір структури і складу технічних засобів збору
та обробки інформації проводиться на основі аналізу виконуваних функцій контролю
та управління конкретними об'єктами водопостачання. Так, контроль тиску в
диктуючих точках мережі і управління автоматизованими насосними станціями,
засувками на мережі та ін. Повинні здійснюватися централізовано з центрального
диспетчерського пункту міста (або окремої зони водопровідної мережі).
Для цих цілей можуть використовуватися системи
телемеханіки з контрольованими пунктами (КП) малої місткості. Вони повинні
забезпечувати збір інформації від датчиків, видачу керуючих впливів на
виконавчі механізми і локальні регулятори, ретрансляцію інформації, що
проходить по каналу зв'язку з пунктом управління (ПУ), можливість підключення
аналогових приладів (при необхідності). Основні вимоги до КП: мінімальні
вартість і габарити, можливість компоновки необхідного поєднання входів -
виходів і нарощування інформаційної ємності з мінімальним кроком, можливість
послідовного підключення КП для скорочення кількості каналів зв'язку з ПУ.
На об'єктах з відносно невеликою кількістю
контрольованих і керованих параметрів, які не обладнаних операторскими пунктами
і працюють за заданою програмою (машинні відділення великих насосних станцій,
фільтрувальні відділення на очисних спорудах і т.д.), доцільно використовувати
спеціалізовані програмовані мікропроцесорні контролери (ПМК) або серійні
мікроЕОМ. Вони повинні мати пристрої введення - виведення інформації і
виконувати функції існуючих сьогодні релейних командо-апаратів і станцій
управління різного призначення і пристроїв зв'язку з об'єктом у поєднанні з
попередньою обробкою інформації. Обробка включає наступне:
масштабування і линеаризацию параметрів
телевимірювань поточних значень (ТТ);
інтегрування і масштабування параметрів
телевимірювань інтегральних значень (ТІ);
порівняння з уставками параметрів ТТ і
номенклатурну видачу в канал зв'язку з оператором сигналу про порушення
уставок;
облік часу роботи і простою
технологічного обладнання (за сигналами ТЗ, що відображає стан обладнання);
розрахунок техніко-економічних
показників по одиницях обладнання та відділенню в цілому;
поточну ідентифікацію характеристик
одиниць обладнання (за умови, що для цього не потрібно інформація про інші
мікроЕОМ або ПМК);
зберігання та передачу по каналу зв'язку
на ОП і МДП всіх обчислених значень параметрів;
програмне керування обладнанням.
Мінімальний склад апаратури, необхідний для
виконання цих функцій: мікропроцесор, перепрограмований пристрій (ППЗУ),
оперативний запам'ятовуючий пристрій для зберігання поточної інформації і
результатів обчислень, пристрій зв'язку з об'єктом, що комплектуються
необхідною кількістю блоків введення - виведення, апаратура міжмашинного
зв'язку.
Програми функціонування ПМК або мікроЕОМ
зберігаються в ППЗУ для запобігання несанкціонованих змін і втрати при перебоях
в системі живлення.
На операторських пунктах водопровідних споруд
(насосні станції першого і другого підйому, цехи очищення води і реагентне
господарство, групи артезіанських свердловин) встановлюються ПМК або мікроЕОМ,
що виконують перераховані вище функції, крім того, тут повинно здійснюватися відображення
реєстрація інформації про хід технологічного процесу у вигляді, зручному для
сприйняття оператором, а також реєстрація дій оператора по зміні ходу
технологічного процесу. Для цього ПМК або мікроЕОМ повинні бути доповнені
дисплейними модулями і, при необхідності, друкуючим пристроєм.
Всі ПМК або мікроЕОМ, встановлені на
операторських пунктах, повинні бути з'єднані з мікроЕОМ на МДП. Структура
зв'язку залежить від відстаней. При відстанях між окремими мікроЕОМ до 0,5- 1
км вони можуть бути з'єднані в локальну обчислювальну мережу магістральної або
кільцевої архітектури. При невеликих відстанях зв'язок повинен здійснюватися по
радіальних каналах, проте локальна мережа переважніша, оскільки забезпечує
більшу надійність, живучість системи, реконфігурацію при відмовах окремих
пристроїв. Крім того, апаратура для межмашинного обміну по радіальних каналах
дорожче, ніж для локальної мережі.
У функції мікроЕОМ, встановленої на місцевому
диспетчерському пункті, крім всіх функцій, які виконуються на операторському
пункті, входить:
розрахунок техніко-економічних
показників по окремих спорудах;
формування і видача диспетчеру
оперативної інформації на відеотермінальних пристрої та друк;
формування і видача на відеотермінальних
пристрої фрагментів мнемосхеми;
формування та ведення локального банку
даних;
прогнозування ходу технологічного
процесу на спорудах, підпорядкованих МДП;
визначення раціональної завантаження
устаткування на спорудах, підпорядкованих МДП;
формування та друк протоколів роботи
водопровідних споруд.
Для виконання цих функцій мікроЕОМ додатково
повинна бути обладнана графічним дисплеєм, алфавітно-цифровим друкуючим
пристроєм, зовнішньою пам'яттю на гнучким або жорстким магнітним диском.
МікроЕОМ, встановлені на місцевих диспетчерських
пунктах, повинні бути з'єднані з ЕОМ, встановленої на ЦДП. З метою уніфікації
технічних засобів для полегшення експлуатації системи бажано, щоб ЕОМ ЦДП була
однотипною з ЕОМ МДП.
У функції ЕОМ, яка встановлюється на центральному
диспетчерському пункті, входять:
збір і первинна обробка інформації по
водопровідної мережі (при централізованому управлінні мережею);
функції по обробці, реєстрації та
відображенню інформації і ведення банку даних для всієї системи в цілому;
зв'язок з ЕОМ автоматизованої системи
організаційно-технологічного управління.
ЕОМ ЦДП комплектується додатковими блоками ОЗУ і
периферійними пристроями: алфавітно-цифровими дисплеями, кольоровими графічними
дисплеями, АЦПУ, пристроями зовнішньої пам'яті на гнучких і жорстких магнітних
дисках і магнітних стрічках. З метою підвищення продуктивності і надійності на
ЦДП бажано використовувати двомашинні обчислювальні комплекси.
Розглянута вище структура системи збору та
обробки інформації реалізується за допомогою сучасних мікропроцесорних
телекомплексів.
Комплекс КТС ЛШУС-2 (мікроДАТ) може бути
рекомендований для локальних систем управління технологічними агрегатами і
процесами в різних галузях промисловості, а також в непромислової сфері. Засоби
мікроДАТ використовуються в якості активного пристрою зв'язку з об'єктом,
оперативним персоналом і ЕОМ. У локальних АСУТП КТС ЛШУС-2 виконує наступні
функції:
збір та обробку інформації,
централізований контроль за ходом технологічного процесу;
безпосереднє цифрове управління
технологічними процесами (або цифрову корекцію установок локальних
регуляторів);
програмно-логічне керування;
ручне введення і відображення
технологічної інформації;
передачу даних між територіально
розосередженими підсистемами.
В ієрархічних АСУТП КТС ЛШУС-2, крім зазначених
функцій, здійснює також підготовку даних для верхніх рівнів управління і
виконує отримані від них директиви.
В основу побудови КТС ЛШУС-2 покладено принципи
уніфікації конструктивної бази, типізація технічних засобів, стандартизації
інтерфейсів і широкого агрегаттування на декількох компонувальних рівнях.
Останнє дозволяє раціонального вирішувати всі типові задачи автоматизації в
локальних АСУТП.
У номенклатуру КТС ЛШУС-2 входять мікропроцесорні
засоби обробки даних і управління (мікропроцесорні контролери); арифметичні
розширювачі; кошти обміну даними (мікропроцесорні контролери зв'язку, елементи
сполучення з ЕОМ, узгоджувачі інтерфейсів та ін.); засоби зберігання програм,
констант і даних (елементи постійною, програмованої і оперативної пам'яті);
засоби перетворення, нормалізації і введення даних від датчиків з безперервними
і дискретними електричними вихідними сигналами, засоби ручного введення і
відображення інформації для місцевих пунктів контролю і управління та ін.
Процес побудови розподіленої АСУТП на базі КТС
ЛШУС-2 зводиться до декомпозиції системи по ієрархічних рівнях і визначенню
локального ярусу системи, який пов'язаний безпосередньо з технологічним
обладнанням. Основу локального ярусу системи управління утворюють
мікропроцесорні функціональні комплекси (ФК), кожен з яких керує окремою
ділянкою технологічного процесу, агрегатом або спорудою. Функціональний
комплекс містить мікропроцесорний модуль управління і деяке число агрегатних
модулів. Кожен ФК може функціонувати самостійно, реалізуючи програму, записану
в ПЗП, або може бути пов'язаний з іншими КФК, при цьому один з них виконує
функції ведучого.
Груповий локальний координатор має доступ до
пам'яті і, отже, до даних кожного ФК з групи для занесення коригувальних
впливів, а також для отримання необхідних даних. Локальний координатор виконує
розрахунки, що вимагають таких даних, якими не володіє кожен функціональний
комплекс окремо, контролює правильність роботи ФК і при збоях дублює (замінює
його). З цією метою іноді (у разі особливих вимог до надійності системи
управління) передбачається зв'язок локального координатора з периферійними
пристроями кожного ФК. За допомогою локального координатора здійснюється також
зв'язок локальної підсистеми з верхнім ярусом (координатором АСУТП). Технічна
реалізація локального координатора різна і залежить від виконуваних функцій.
Якщо ці функції в основному обчислювальні, наприклад обробка масивів,
техніко-економічні розрахунки, оптимізаційні задачі, то координатор являє собою
мікроЕОМ (зазвичай '' Електроніка 60»), а якщо координатор виконує в основному
функції контролю, регулювання, відображення та реєстрації технологічної
інформації, то він реалізується за допомогою засобів КТС ЛШУС-2, з яких
будуються локальні комплекси управління.
Останнім часом з'явилися й інші телекомплекси,
побудовані із застосуванням мікроЕОМ на принципах розподіленої обробки
інформації. Прикладом можуть служити комплекси, '' Граніт «та ЛТК-133.
Телекомплекс '' Граніт «призначений для передачі, прийому, обробки і
відображення телемеханічної інформацій і може бути використаний для побудови
автоматизованих систем управління технологічними процесами. Виконаний за
магістрально-модульним принципом з обмеженого набору функціональних елементів з
уніфікованими внутрішніми зв'язками, Регламентованими інтерфейсом. Зміна видів,
обсягів інформації та числа пунктів управління (ПУ) і контрольованих пунктів
(КП) досягається простим нарощуванням числа і типів функціональних елементів і
конструктивів.
Можливість організації зв'язку між ПУ дозволяє
створювати на базі '' Граніту «багаторівневі ієрархічні системи. На кожному
рівні ієрархії до ПУ можна підключити оперативно-диспетчерське обладнання та
організувати зв'язок із зовнішнім ЕОМ.
Комплекс перевершує аналоги по таких
найважливіших техніко-економічними показниками, як кількість КП, інформаційна
ємність ПУ і КП, питома споживана потужність, питома матеріаломісткість, питома
обсяг.
Локальний телемеханічний комплекс ЛТК-133
призначений для автоматизації управління окремими установками, агрегатами і
технологічними процесами з невеликим числом контрольованих і керованих
параметрів.
В залежності від виконання комплекс може
працювати в двох режимах: в автономному - автоматичне керування об'єктом і в
складі керуючого комплексу, забезпечуючи режим телеконтролю та телекерування.
При централізованому контролі ЛТК-133 забезпечує:
збір та первинну обробку інформації, що
надходить від датчиків;
формування і накопичення даних про хід
технологічного процесу і стану обладнання;
аналіз спрацювання блокувань і захистів;
контроль і реєстрацію параметрів процесу
та їх відхилень від заданих значень;
діагностику і прогнозування ходу
процесу, стану технологічного обладнання та систем управління.
При програмно-логічному управлінні ЛТК-133
дозволяє здійснювати:
збір інформації від дискретних датчиків;
перетворення сигналів, що надходять від
аналогових датчиків;
обробку даних за заданою програмою;
висновок командної інформації для впливу
на виконавчі пристрої об'єкта в запропонованої послідовності або залежно від
результату попередніх операцій. Комплекс компонується в основному з елементів
КТС ЛШУС-2.
Функціональна гнучкість ЛТК-133 забезпечується
програмним методом. ЛТК-133 може також входити до складу телекомплексу ТК-132,
використовуваного для контролю і управління великими системами водопостачання.
При підготовці ТЕО замість детальних розрахунків
економічних показників можна скористатися рекомендованими методами укрупненої
експресному оцінки очікуваної річної економії, яка складає близько 3 тис. грн.
на 1 млн  поданої водопроводом води і близько 2,5
тис. грн. в рік на одну каналізаційну насосну станцію.
поданої водопроводом води і близько 2,5
тис. грн. в рік на одну каналізаційну насосну станцію.
Оскільки для міста В. річна подача води становить близько
68 млн. , а кількість каналізаційних насосних
станцій - 7, то очікувана річна економія
, а кількість каналізаційних насосних
станцій - 7, то очікувана річна економія  тис. грн. Для укрупнених передпланових оцінок витрат на створення
і експлуатацію АСУ ТП основою може служити вартість обладнання, з якою
пов'язані всі інші види витрат.
тис. грн. Для укрупнених передпланових оцінок витрат на створення
і експлуатацію АСУ ТП основою може служити вартість обладнання, з якою
пов'язані всі інші види витрат.
За попередніми даними, вартість обладнання складається з
наступного: вартості ЕВМ СМ-1300 - 30 тис. грн., вартості апаратури
телемеханіки ТК-132 (одного ПУ, трьох розширених комплектів ЛТК-133, восьми
комплектів ЛТК-133 середньої заповнювання) -40 тис. грн. + 3 тис. гнр. +  тис. грн. = 125 тис. грн.; вартості
відсутніх коштів локальної автоматики і датчиків - 100 тис. грн.; вартості
диспетчерського обладнання та засобів зв'язку - 40 тис. грн.; непередбачених
витрат - 30 тис. грн.
тис. грн. = 125 тис. грн.; вартості
відсутніх коштів локальної автоматики і датчиків - 100 тис. грн.; вартості
диспетчерського обладнання та засобів зв'язку - 40 тис. грн.; непередбачених
витрат - 30 тис. грн.
З урахуванням вартості монтажно-налагоджувальних робіт
вартість обладнання  = 1,2 (30 + 125 + 100 + 40 + 30) = 390
тис. грн.
= 1,2 (30 + 125 + 100 + 40 + 30) = 390
тис. грн.
Експлуатаційні витрати  становлять у середньому 20% :
становлять у середньому 20% :
 тис. грн.
тис. грн.
Вартість проектування АСУ ТП в середньому становить 30% :
 тис. грн.
тис. грн.
На підставі цих даних можна визначити:
Термін окупності витрат
 грн;
грн;
коефіцієнт ефективності витрат
 .
.
Так як  = 0,57
= 0,57 = 0,35, то витрати на створення АСУ ТП
водопостачання міста В. є доцільними.
= 0,35, то витрати на створення АСУ ТП
водопостачання міста В. є доцільними.
Висновок
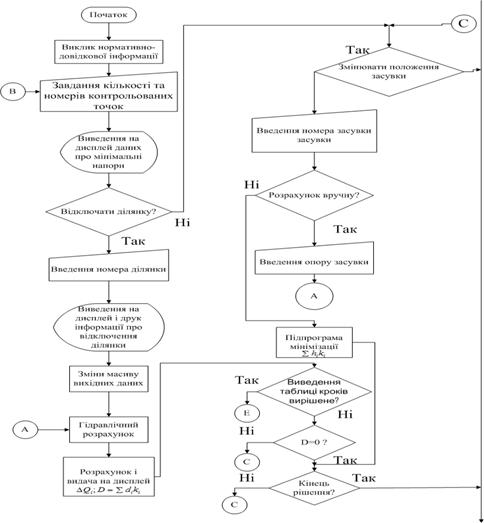
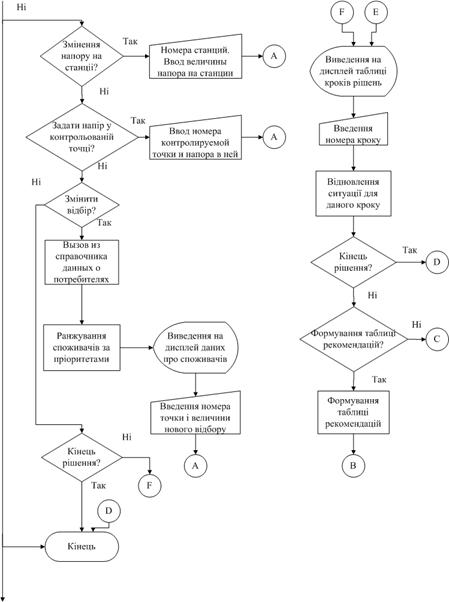
У ході виконання курсового проекту я розглядав
тему автоматизації насосних установок, станцій управління на об'єктах ЖКГ.
Прогнозував графік водоспоживання, формування графіка роботи насосних станцій і
розглядав блок-схему алгоритму розрахунку. У наш час автоматизація насосних
установок відіграє важливу роль у сфері водопостачання, дозволяє підвищувати
надійність і безперебійність водопостачання, зменшувати витрати праці і
експлуатаційні витрати, розміри регулюючих резервуарів, забезпечує оптимальний
режим роботи систем подачі та розподілу води.
Використана література
1. Егільскій І.С. Автоматизовані системи управління
технологічними процесами подачі та розподілу води. - Л.: Стройиздат, Ленингр,
отд-ня, 1988. -216 с., Іл. - ISBN 5-274-00173-4
2. Автоматизація насосних установок. Автор: Карпов Ф.Ф.,
Козлов В.М., Лоодус О.Г. 1961 р.
. Автоматизація систем водопостачання і водовідведення -
Попковіч Г.С. Гордєєв М.А. 1986
. Насосні і повітродувні станції: Підручник для середніх
професійних навчальних закладів, Тімахова Н.С. Комков В.А.
. Методика оцінки ефективності застосування автоматизації
насосних установках. Автор: лезнь Б.С.