Материал: Алгоритм, эвристически строящий оптимальный граф для задачи децентрализованного поиска
4х4 (стартовый граф - полный граф)
|
|
|
|
|
|
|
|
|
|
|
|
 Рисунок 34 - L1, 0, 1728
Рисунок 34 - L1, 0, 1728
 Рисунок 35 - L1, 1, 1828
Рисунок 35 - L1, 1, 1828
 Рисунок 36 - L1, 2, 1782
Рисунок 36 - L1, 2, 1782
 Рисунок 37 - L2, 0, 1800
Рисунок 37 - L2, 0, 1800
 Рисунок 39 - L2, 2, 1814
Рисунок 39 - L2, 2, 1814
 Рисунок 40 - LI, 0, 1816
Рисунок 40 - LI, 0, 1816
Можно заметить, что результаты алгоритма не отличаются не зависимо от стартового графа, поэтому можно предполагать, что мы нашли глобальный минимум. Рассмотрим результаты для графа 5х5.
5х5 (стартовый граф - граф-сетка)
|
|
|
|
|
|
|
|
|
|
|
|
 Рисунок 43 - L1, 0, 5429
Рисунок 43 - L1, 0, 5429
 Рисунок 44 - L1, 1, 5729
Рисунок 44 - L1, 1, 5729
 Рисунок 45 - L1, 2, 5556
Рисунок 45 - L1, 2, 5556
 Рисунок 46 - L2, 0, 5613
Рисунок 46 - L2, 0, 5613
 Рисунок 47 - L2, 1, 5697
Рисунок 47 - L2, 1, 5697
 Рисунок 48 - L2, 2, 5683
Рисунок 48 - L2, 2, 5683
 Рисунок 50 - L2, 1, 5733
Рисунок 50 - L2, 1, 5733
 Рисунок 51 - L2, 2, 5710
Рисунок 51 - L2, 2, 5710
5х5 (стартовый граф - полный граф)
|
|
|
|
|
|
|
|
|
|
|
|
 Рисунок 52 - L1, 0, 5373
Рисунок 52 - L1, 0, 5373
 Рисунок 53 - L1, 1, 5685
Рисунок 53 - L1, 1, 5685
 Рисунок 54 - L1, 2, 5563
Рисунок 54 - L1, 2, 5563
 Рисунок 56 - L2, 1, 5633
Рисунок 56 - L2, 1, 5633
 Рисунок 57 - L2, 2, 5650
Рисунок 57 - L2, 2, 5650
В этом же примере можно заметить, что алгоритм может давать разные решения при разном начальном графе. Далее будут приведены оптимальный графы размером 6х6 и 7х7 по одному для каждой функции расстояний.
6х6
Рисунок 61 - L1, 0, 13356 c полного

Рисунок 62 - L2, 2, 13452 с полного
Рисунок 63 - LI, 0, 13882 и с полного и с сетки
7х7
Рисунок 64 - L1, 0, 28177 с полного
Рисунок 65 - L2, 0, 29095 с полного
Рисунок 66 - LI, 0, 29498 с полного
Для метода ветвей и границ на вход были поданы матрицы
меньших размеров, так как этот алгоритм ищет точное оптимально решение и это
занимает много времени. Тесты проводились на этом алгоритме, чтобы проверить
корректность предположения, что среди всех оптимальных решений обязательно найдется
хотя бы одно, которое содержит в себе только симметричные ребра.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 Рисунок 67 - оптимальный граф 2х3
Рисунок 67 - оптимальный граф 2х3
 Рисунок 68 - оптимальный граф для 2х4
Рисунок 68 - оптимальный граф для 2х4
 Рисунок 69 - оптимальный граф для 2х6
Рисунок 69 - оптимальный граф для 2х6
 Рисунок 70 - ОГ 1х4
Рисунок 70 - ОГ 1х4
 Рисунок 71 - ОГ 1х5
Рисунок 71 - ОГ 1х5
 Рисунок 72 - ОГ 1х5
Рисунок 72 - ОГ 1х5
 Рисунок 73 - ОГ 1х6
Рисунок 73 - ОГ 1х6
 Рисунок 74 - ОГ 1х7
Рисунок 74 - ОГ 1х7
 Рисунок 75 - ОГ 1х8
Рисунок 75 - ОГ 1х8
 Рисунок 76 - ОГ 1х9
Рисунок 76 - ОГ 1х9
 Рисунок 77 - ОГ 1х10
Рисунок 77 - ОГ 1х10
 Рисунок 78 - ОГ 1х11
Рисунок 78 - ОГ 1х11
 Рисунок 79 - ОГ 1х11
Рисунок 79 - ОГ 1х11
 Рисунок 80 - ОГ 1х11
Рисунок 80 - ОГ 1х11
Можно заметить, что для графов 2х3, 2х4 и 2х5
получившиеся оптимальные графы являются симметричными, однако для 1х11 уже
возникает несимметричное решение. При этом симметричное все же присутствует.
Однако не всегда так. Рассмотрим следующие результаты для 3х4.
|
|
|
|
|
|
 Рисунок 81 - ОГ 3х4
Рисунок 81 - ОГ 3х4
 Рисунок 82 - ОГ 3х4
Рисунок 82 - ОГ 3х4
 Рисунок 83 - ОГ 3х4
Рисунок 83 - ОГ 3х4
 Рисунок 84 - ОГ 3х4
Рисунок 84 - ОГ 3х4
Получившиеся решения не симметричны, однако для каждого несимметричного есть симметричное ему другое несимметричное решение. Таким образом гипотеза, что всегда есть симметричное решение не подтвердилась, поэтому нужно либо отказываться от симметричности и перебирать все ребра, либо находить такой способ, чтобы при жадный поиск строил симметричные пути.
Также табу алгоритм был запущен на графах с 1х4 до
1х42 и с 2х2 до 2х25, по результатам работы были построены графики зависимости
сложности поиска от количества вершин. Результаты приведены на следующих
рисунках.
|
|
|
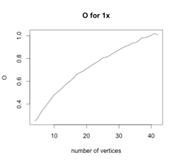 Рисунок 85 - Сложность поиска от количества вершин
для 1х
Рисунок 85 - Сложность поиска от количества вершин
для 1х
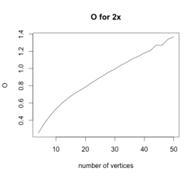 Рисунок 86 - Сложность поиска от количества вершин
для 2х
Рисунок 86 - Сложность поиска от количества вершин
для 2х
Для того, чтобы понять какая зависимость представлена
на графике, то построим зависимость сложности от квадрата логарифма количества
вершин.
|
|
|
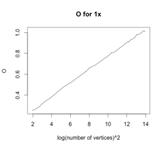 Рисунок 87 - Сложность от квадрата логарифма
количества вершин для 1х
Рисунок 87 - Сложность от квадрата логарифма
количества вершин для 1х
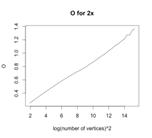 Рисунок 88 - Сложность от квадрата логарифма
количества вершин для 2х
Рисунок 88 - Сложность от квадрата логарифма
количества вершин для 2х
Можно заметить, что сложность поиска для таких графов
будет ![]() .
.
Построим зависимость сложности от количества вершин
для графов 2х2, 3х3, 4х4, 5х5, 6х6, 7х7, 8х8, 9х9.
|
|
|
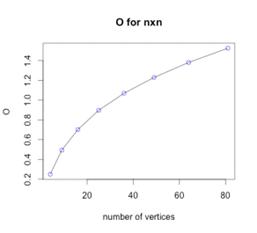 Рисунок 89 - Сложность поиска от количества вершин
для nxn
Рисунок 89 - Сложность поиска от количества вершин
для nxn
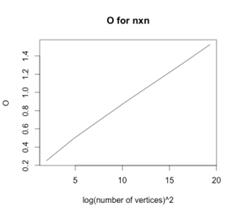 Рисунок 90 - Сложность поиска от квадрата логарифма
количества вершин для nxn
Рисунок 90 - Сложность поиска от квадрата логарифма
количества вершин для nxn
Можно заметить, что тут также присутствует сложность
поиска ![]() .
.
граф алгоритм локальный
стартовый
Вывод
В результате работы был предложен алгоритм, который
эвристически строит оптимальный граф для задачи децентрализованного поиска.
Предполагалось, что алгоритм построит решения, на которых поиск будет работать
быстрее, чем у Клайнберга, однако такого не произошло. Сложность поиска
остается одинаковой. Также был предложен алгоритм, который находит точные
решения для поставленной задачи на малых размерах. Предполагалось, что алгоритм
подтвердит наличие оптимальных решений с только симметричными ребрами, однако
алгоритм дал отрицательный результат. В будущем предполагается построить
алгоритм, который будет строить оптимальный граф для поиска с возможностью
ошибки, т.е. не находить иногда необходимую вершину (задача аппроксимированного
поиска ближайшего соседа). Возможно на такой задаче сложность поиска удастся
уменьшить.
Список литературы
1. Milgram, Stanley. "The small world problem." Psychology today 2, no. 1 (1967): 60-67.
. Maymounkov, Petar, and David Mazieres. "Kademlia: A peer-to-peer information system based on the xor metric." In Peer-to-Peer Systems, pp. 53-65. Springer Berlin Heidelberg, 2002.
. Beaumont, Olivier, Anne-Marie Kermarrec, Loris Marchal, and Etienne Riviere. "VoroNet: A scalable object network based on Voronoi tessellations." In Parallel and Distributed Processing Symposium, 2007. IPDPS 2007. IEEE International, pp. 1-10. IEEE, 2007.
. Kleinberg, Jon. "The small-world phenomenon: An algorithmic perspective." In Proceedings of the thirty-second annual ACM symposium on Theory of computing, pp. 163-170. ACM, 2000.
. Watts, Duncan J., and Steven H. Strogatz. "Collective dynamics of ‘small-world’networks." nature 393, no. 6684 (1998): 440-442.
6. Bollobás,
Béla, and Oliver Riordan. "The diameter of a scale-free random graph." Combinatorica 24,
no. 1 (2004): 5-34.
Приложение
#include "Graph.h"
#include <math.h>
#include <algorithm>
#include <fstream>
#include <iostream>
#include <sys/stat.h>
#include <random>TYPE;TYPE_V;::vector <Graph> bestest;counter;namespace std;::Graph(int n, int m, bool flag)
{>v = n*m;= new int*[v];= new int[v];= new bool[v];= new bool[v];(int i = 0; i < v; i++){[i] = new int[v];[i] = 0;[i] = false;[i] = false;
}(int i = 0; i < v; i++){(int j = 0; j < v; j++){[i][j] = 0;
}
}(i - 1 >= (i / n)*n){[i - 1][i] = 1;[i][i - 1] = 1;
}(i + n < v){[i + n][i] = 1;[i][i + n] = 1;
}(i - n >= 0){[i - n][i] = 1;[i][i - n] = 1;
}
}(flag == true){(int i = 0; i < v; i++){(int j = 0; j < v; j++){(i != j && arr[i][j] == 0)[i][j] = 2;
}
}
}
(int i = 0; i < v; i++){(int j = 0; j < v; j++){(arr[i][j] != 0)[i] += 1;
}
}>n = n;>m = m;
}::Graph(const Graph& g){= g.n;= g.m;= g.v;= new int*[v];= new int[v];= new bool[v];= new bool[v];(int i = 0; i < v; i++){[i] = new int[v];[i] = g.getDegree()[i];[i] = false;[i] = false;
}(int i = 0; i < v; i++){(int j = 0; j < v; j++){[i][j] = g.getArr()[i][j];
}
}(int i = 0; i < g.getStrict().size(); i++){.push_back(g.getStrict()[i]);
}= g.getO();
}::Graph(string nfile){file(nfile);a, b;>> a >> b;>n = a;>m = b;>v = a*b;>arr = new int*[v];>degree = new int[v];>inSearch = new bool[v];>inPath = new bool[v];(int i = 0; i < this->v; i++){>arr[i] = new int[v];>degree[i] = 0;>inSearch[i] = false;>inPath[i] = false;
}(int i = 0; i < this->v; i++){(int j = 0; j < this->v; j++){>> this->arr[i][j];
}
}(int i = 0; i < this->v; i++){(int j = 0; j < this->v; j++){>degree[i] += this->arr[i][j];
}
}
}Graph::addToStrict(Edge ed){.push_back(ed);
}Graph::canDoAction(int iAdd, int jAdd, int iDelete, int jDelete, double best) {a1 = (iAdd / n + 1)*n - 1 - iAdd%n;b1 = (jAdd / n + 1)*n - 1 - jAdd%n;a2 = n*m - 1 - iAdd;b2 = n*m - 1 - jAdd;a3 = (a2 / n + 1)*n - 1 - a2%n;b3 = (b2 / n + 1)*n - 1 - b2%n;ad1 = (iDelete / n + 1)*n - 1 - iDelete%n;bd1 = (jDelete / n + 1)*n - 1 - jDelete%n;ad2 = n*m - 1 - iDelete;bd2 = n*m - 1 - jDelete;ad3 = (a2 / n + 1)*n - 1 - a2%n;bd3 = (b2 / n + 1)*n - 1 - b2%n;oldO = O;flag = 0;(int index = 0; index < strict.size(); index++){(((iAdd == strict.at(index).start && jAdd == strict.at(index).finish) || (a1 == strict.at(index).start && b1 == strict.at(index).finish) || (a2 == strict.at(index).start && b2 == strict.at(index).finish) || (a3 == strict.at(index).start && b3 == strict.at(index).finish)) && strict.at(index).action == true){++;
}(((iDelete == strict.at(index).start && jDelete == strict.at(index).finish) || (ad1 == strict.at(index).start && bd1 == strict.at(index).finish) || (ad2 == strict.at(index).start && bd2 == strict.at(index).finish) || (ad3 == strict.at(index).start && bd3 == strict.at(index).finish)) && strict.at(index).action == false){++;
}
}(flag == 0){true;
}(iAdd != -1){>addSymEdges(iAdd, jAdd);
}(iDelete != -1){>deleteSymEdges(iDelete, jDelete);
}();(O < best){(iAdd != -1){>deleteSymEdges(iAdd, jAdd);
}(iDelete != -1){>addSymEdges(iDelete, jDelete);
}(oldO);true;
}(iAdd != -1){>deleteSymEdges(iAdd, jAdd);
}(iDelete != -1){>addSymEdges(iDelete, jDelete);
}(oldO);false;
}Graph::canDoActionInTabu(int iAdd, int jAdd, int iDelete, int jDelete) {a1 = (iAdd / n + 1)*n - 1 - iAdd%n;b1 = (jAdd / n + 1)*n - 1 - jAdd%n;a2 = n*m - 1 - iAdd;b2 = n*m - 1 - jAdd;a3 = (a2 / n + 1)*n - 1 - a2%n;b3 = (b2 / n + 1)*n - 1 - b2%n;ad1 = (iDelete / n + 1)*n - 1 - iDelete%n;bd1 = (jDelete / n + 1)*n - 1 - jDelete%n;ad2 = n*m - 1 - iDelete;bd2 = n*m - 1 - jDelete;ad3 = (a2 / n + 1)*n - 1 - a2%n;bd3 = (b2 / n + 1)*n - 1 - b2%n;oldO = O;flag = 0;(int index = 0; index < strict.size(); index++){(((iAdd == strict.at(index).start && jAdd == strict.at(index).finish) || (a1 == strict.at(index).start && b1 == strict.at(index).finish) || (a2 == strict.at(index).start && b2 == strict.at(index).finish) || (a3 == strict.at(index).start && b3 == strict.at(index).finish)) && strict.at(index).action == true){++;
}(((iDelete == strict.at(index).start && jDelete == strict.at(index).finish) || (ad1 == strict.at(index).start && bd1 == strict.at(index).finish) || (ad2 == strict.at(index).start && bd2 == strict.at(index).finish) || (ad3 == strict.at(index).start && bd3 == strict.at(index).finish)) && strict.at(index).action == false){++;
}
}(flag == 0){true;
}false;
}Graph::addSymEdges(int a, int b){count = 0;(a >= 0 && b >= 0 && a < v && b < v){(arr[a][b] == 0){[a][b] = 2;[b][a] = 2;[a]++;[b]++;++;a1 = (a / n + 1)*n - 1 - a%n;b1 = (b / n + 1)*n - 1 - b%n;(arr[a1][b1] == 0){[a1][b1] = 2;[b1][a1] = 2;[a1]++;[b1]++;++;
}a2 = n*m - 1 - a;b2 = n*m - 1 - b;(arr[a2][b2] == 0){[a2][b2] = 2;[b2][a2] = 2;[a2]++;[b2]++;++;
}a3 = (a2 / n + 1)*n - 1 - a2%n;b3 = (b2 / n + 1)*n - 1 - b2%n;(arr[a3][b3] == 0){[a3][b3] = 2;[b3][a3] = 2;[a3]++;[b3]++;++;
}count;
}
}0;
}Graph::deleteSymEdges(int a, int b){count = 0;(a >= 0 && b >= 0 && a < v && b < v){(arr[a][b] == 2){[a][b] = 0;[b][a] = 0;[a]--;[b]--;++;a1 = (a / n + 1)*n - 1 - a%n;b1 = (b / n + 1)*n - 1 - b%n;(arr[a1][b1] == 2){[a1][b1] = 0;[b1][a1] = 0;[a1]--;[b1]--;++;
}a2 = n*m - 1 - a;b2 = n*m - 1 - b;(arr[a2][b2] == 2){[a2][b2] = 0;[b2][a2] = 0;[a2]--;[b2]--;++;
}a3 = (a2 / n + 1)*n - 1 - a2%n;b3 = (b2 / n + 1)*n - 1 - b2%n;(arr[a3][b3] == 2){[a3][b3] = 0;[b3][a3] = 0;[a3]--;[b3]--;++;
}count;
}
}0;
}Graph::Distance(int a, int b){x_a = a%n;y_a = a / n;x_b = b%n;y_b = b / n;(TYPE == -1){d = max(abs(x_a - x_b), abs(y_a - y_b));d;
}{d = pow(abs(x_a - x_b), TYPE) + pow(abs(y_a - y_b), TYPE);pow(d, 1 / (double)TYPE);
}
}Graph::FindPath(int a, int b){[a] = true;(a == b){[a] = true;;
}[a] = true;t = 0;* paths = new double[degree[a]];* indexes = new int[degree[a]];(int i = 0; i < v; i++){(arr[a][i] > 0){[i] = true;[t] = Distance(i, b);[t] = i;++;(t == degree[a]);
}
}minI = 0;minV = paths[0];(int i = 1; i < degree[a]; i++){(paths[i] < minV && inPath[indexes[i]] == false){= paths[i];= i;
}{(TYPE_V){0:(paths[i] == minV && inPath[indexes[i]] == false){(degree[indexes[i]] < degree[indexes[minI]]){= paths[i];= i;
}
};1:(paths[i] == minV && inPath[indexes[i]] == false){(degree[indexes[i]] > degree[indexes[minI]]){= paths[i];= i;
}
};2:(paths[i] == minV && inPath[indexes[i]] == false){(rand()%2 == 0){= paths[i];= i;
}
};
}
}
}(indexes[minI], b);[] paths;[] indexes;;
}Graph::calculateO(){* sum = new int[v];(int i = 0; i < v; i++){[i] = 0;(int j = 0; j < v; j++){(int t = 0; t < v; t++){[t] = false;
}(i, j);count = 0;(int t = 0; t < v; t++){[i] += inSearch[t];+= inSearch[t];[t] = false;
}
//cout << "For v = " << i << " serch to " << j << " = " << count << endl;
}
}s = 0.0;(int i = 0; i < v; i++){
//cout<<"i = "<< i << " sum = " << sum[i] << endl;+= sum[i];
}[] sum;= s;s;
}Graph::calculateApproxO(){sum = 0.0;number = 20;t = 0;(number != t){i = rand()%v;j = rand()%v;(int t = 0; t < v; t++){[t] = false;
}(i, j);(int t = 0; t < v; t++){+= inSearch[t];[t] = false;
}++;
}= (sum/number)*(v*v);sum;
}Graph::setO(double O){>O = O;
}Graph::save(std::string dir, std::string name){::cout << "Start SAVE" << std::endl;file;
//dir = "/"+dir;
//std::cout << dir << endl;(dir.c_str(), 0777);// << endl;.open(dir + "/" + name);(int i = 0; i < v; i++){(int j = 0; j < v; j++){(arr[i][j] != -1)<< arr[i][j] << " ";<< 0 << " ";
}<< endl;
}.close();::cout << "Finish SAVE" << std::endl;
}& Graph::operator=(const Graph &g){(int i = 0; i < v; i++){[i] = g.getDegree()[i];[i] = false;
}(int i = 0; i < v; i++){(int j = 0; j < v; j++){[i][j] = g.getArr()[i][j];
}
}.clear();(int i = 0; i < g.getStrict().size(); i++){.push_back(g.getStrict()[i]);
}= g.getO();*this;
}Graph::CheckStrict(){(int i = 0; i < strict.size(); i++){[i].numberOfSteps--;
}(int i = strict.size() - 1; i >= 0; i--){(strict[i].numberOfSteps == 0){.erase(strict.begin() + i);
}
}
}Graph::RealTabuStep(int number_for_add, int number_for_delete){bestKnown(*this);fails = 0;flag = false;(number_for_add + number_for_delete > 0){();<Graph> graphs;** edges_add = new int*[number_for_add];** edges_delete = new int*[number_for_delete];(int i = 0; i < number_for_add; i++)_add[i] = new int[2];(int i = 0; i < number_for_delete; i++)_delete[i] = new int[2];c_add = 0;c_delete = 0;(int i = 0; i < v; i++){((i < (n*m / 2)) && (i <= (n/ 2 + i / n))){(int j = i + 1; j < v; j++){(arr[i][j] == 0){_add[c_add][0] = i;_add[c_add][1] = j;_add++;
}(arr[i][j] == 2){_delete[c_delete][0] = i;_delete[c_delete][1] = j;_delete++;