Материал: PZ_TMM
1. Кинематический анализ и синтез рычажного механизма
1.1 Структурный анализ механизма
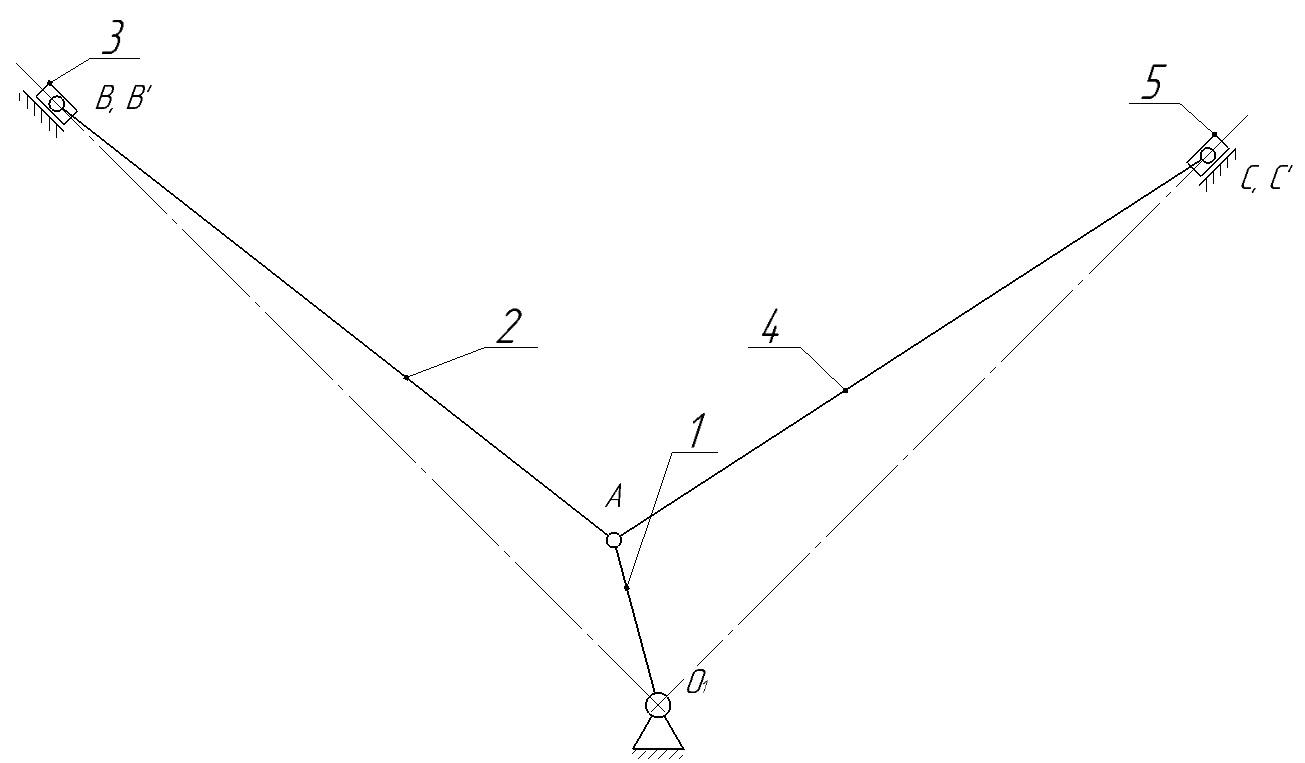
Рисунок 1 – Структурная схема рычажного механизма
Определение количества звеньев и кинематических пар
В данном механизме пять подвижных звеньев:
1 – кривошип, вращательное движение;
2 - шатун, сложное движение;
3 – ползун, поступательное движение;
4 – шатун, сложное движение;
5 – ползун, поступательное движение;
1 – входное звено; 3,5 – выходное звено.
В данном механизме семь одноподвижных кинематических пар: О1 (0;1) – вращательная; А (1;2) – вращательная; B (2;3) – вращательная; Вʹ (3;0) – поступательная; А́ (1;4) – вращательная;С (4;5) – вращательная; Сʹ (5;0) – поступательная.
Определяем число степеней свободы данного механизма:

![]()
где n -число подвижных звеньев, входящих в состав механизма,
р1 и р2 – число одноподвижных и двухподвижных кинематических пар механизма.
В данном механизме n = 5, р1 = 7, р2 = 0.

Раскладываем механизм на структурные группы и определяем их класс и порядок.
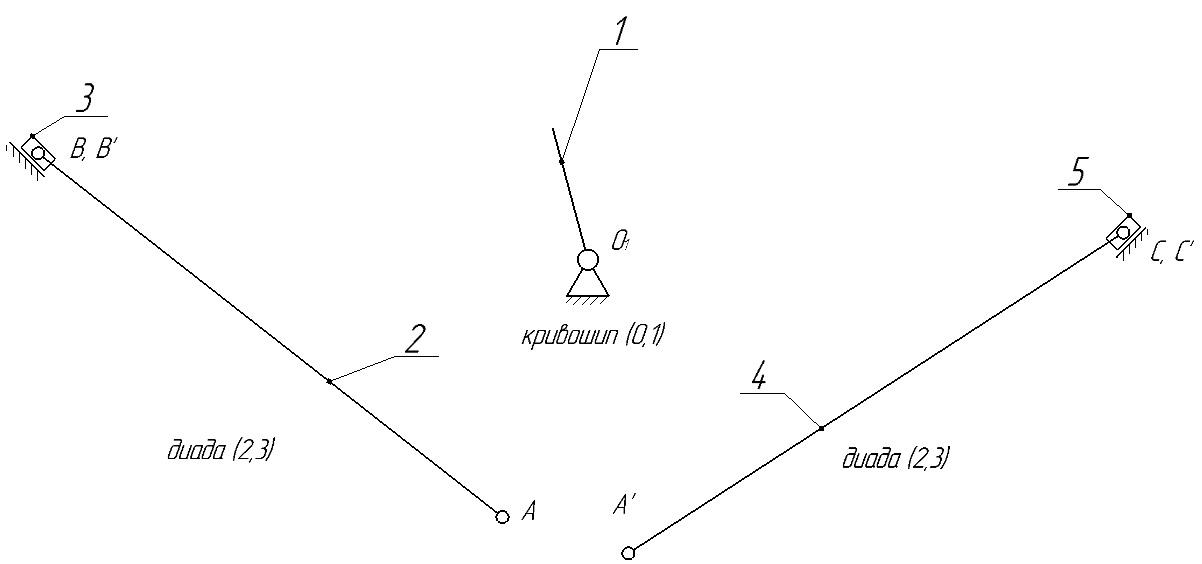
Рисунок 2 – Структурные группы механизма
Записываем формулу строения механизма:
 .
.
Механизм относится к механизмам 2-го класса.
1.2 Построение планов положения механизмов
Для построения кинематической схемы механизма по заданной обобщенной координате выбираем масштабный коэффициент длин Кl:
 м/мм.
м/мм.
В выбранном масштабе Kl определяем отрезки, изображающие длины звеньев механизма на чертеже:
 мм;
мм; мм
мм
Из точки О1 откладываем длину кривошипа О1А , далее откладываем шатуны до пересечения с осями АВ и АС соответственно.
,
1.3 Построение планов скоростей механизма
Построение плана скоростей начинаем с определения угловой скорости кривошипа:
 с-1.
с-1.
Определяем скорость точки А:
 м/с.
м/с.
Выбираем масштабный коэффициент построения плана скоростей:
 м
м с
–
1/мм.
с
–
1/мм.
Выбираем
полюс pv
и из него откладываем отрезок pvа
= 73.68 мм перпендикулярно звену О1А,
при этом вектор
![]() перпендикулярен кривошипу в заданном
положении и направлен в сторону его
вращения.
перпендикулярен кривошипу в заданном
положении и направлен в сторону его
вращения.
Чтобы определить скорость точки B составим два векторных уравнения ее движения.

При
этом скорость точки B
относительно А ( )
направлена
перпендикулярно звену АВ, а скорость
точки В́ относительно B
(
)
направлена
перпендикулярно звену АВ, а скорость
точки В́ относительно B
( )
– параллельно оси. Решаем графически
эту систему и определяем скорость точки
В
для данного положения механизма из
плана:
)
– параллельно оси. Решаем графически
эту систему и определяем скорость точки
В
для данного положения механизма из
плана:
 м/с.
м/с.
Чтобы определить скорость точки С составим два векторных уравнения ее движения.

При
этом скорость точки С относительно А
( )
направлена
перпендикулярно звену АC,
а скорость точки С́ относительно C
(
)
направлена
перпендикулярно звену АC,
а скорость точки С́ относительно C
( )
– параллельно оси. Решаем графически
эту систему и определяем скорость точки
C
для данного положения механизма из
плана:
)
– параллельно оси. Решаем графически
эту систему и определяем скорость точки
C
для данного положения механизма из
плана:
 м/с.
м/с.
Таблица 1 – значения скоростей механизма в различных положениях
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
VA |
18.42 |
18.42 |
18.42 |
18.42 |
18.42 |
18.42 |
18.42 |
18.42 |
18.42 |
18.42 |
18.42 |
18.42 |
|
VB |
18.42 |
14.95 |
8.11 |
0 |
8.21 |
14.95 |
18.42 |
16.96 |
10.21 |
0 |
10.21 |
10.21 |
|
VC |
0 |
10.21 |
16.96 |
18.42 |
14.95 |
8.21 |
0 |
8.21 |
14.95 |
18.42 |
16.96 |
16.96 |
|
VAB |
0 |
9.27 |
15.98 |
18.42 |
15.98 |
9.27 |
0 |
9.27 |
15.98 |
18.42 |
15.98 |
9.27 |
|
VAC |
18.42 |
15.98 |
9.27 |
0 |
9.27 |
15.98 |
18.42 |
15.98 |
9.27 |
0 |
9.27 |
15.98 |
1.4 Построение планов ускорений механизма
Определяем ускорение точки A на кривошипе при условии, что w1 = const:
 м/
м/ .
.
Ускорение аА изображаем отрезком paa=84.84 мм, направленным параллельно О1A. Тогда масштабный коэффициент:
 м
м /мм.
/мм.
Ускорения
точек С и A
известны
 .Чтобы
определить ускорение точки С,
составим два векторных уравнения ее
движения:
.Чтобы
определить ускорение точки С,
составим два векторных уравнения ее
движения:
Определим
величину относительного нормального
ускорения
 :
:
 м/
м/ .
.
Ускорение точки C из плана равно
 м/
м/ .
.
Ускорения
точек А и
 известны. Чтобы определить ускорение
точки B, составим два векторных уравнения
ее движения:
известны. Чтобы определить ускорение
точки B, составим два векторных уравнения
ее движения:

Определим
величину относительного нормального
ускорения :
:
 м/
м/ .
.
Ускорение точки B из плана
 м/
м/ .
.
Таблица 2 – значения ускорений механизма в различных положениях
|
|
0 |
1 |
3 |
5 |
7 |
9 |
11 |
|
aA |
4242 |
4242 |
4242 |
4242 |
4242 |
4242 |
4242 |
|
aB |
534 |
2251 |
3084 |
2251 |
1991 |
5302 |
1991 |
|
aC |
5302 |
5348 |
534 |
3007 |
3007 |
534 |
5348 |
|
|
4275.5 |
3666 |
0 |
3666 |
3666 |
0 |
3666 |
|
|
0 |
2075 |
4275 |
2075 |
2075 |
4275 |
2075 |
|
|
0 |
268.5 |
1060 |
268.5 |
268.5 |
1060 |
268.5 |
|
|
1060 |
798 |
0 |
798 |
798 |
0 |
798 |




1.5 Определение угловых скоростей и ускорений для первого положения механизма
Определим угловые скорости и ускорения для заданного положения механизма:


Направления угловых скоростей указывают векторы относительных скоростей, если их перенести в соответствующие точки механизма.
Определим угловые ускорения для заданного положения механизма:

Направления угловых ускорений указывают векторы относительных тангенциальных ускорений, если их перенести в соответствующие точки механизма.
1.6 Определение скоростей и ускорений центров масс
Определяем скорости центров масс:




Определяем ускорения центров масс:




2. Силовой анализ механизма
2.1 Определение сил тяжести и сил инерции звеньев
Исходные данные:
m3=2.7кг.; m5=2.7кг.; m2=2.5кг.; m4=2.5кг.,
 H.
H.
Определяем силы тяжести:
 H.
H.

Определяем силы инерции:
 .,
.,
 .,
.,
 .,
.,
 .,
.,