Материал: Lab_prakt_NSU_final
8.1. Общие сведения
Широтно-импульсная модуляция (ШИМ) – это способ формирования импульсных сигналов в системах управления, состоящий в изменении длительности при неизменной частоте следования импульса. В зависимости от реализации ШИМ можно разделить на аналоговый и цифровой.
В ШИМ-генераторах аналогового типа, управляющий сигнал формируется аналоговым компаратором, когда на инвертирующий вход компаратора подается треугольный или пилообразный сигнал («пила»), называемый также опорным, а на неинвертирующий – мо-
дулирующий непрерывный сигнал. Выходные импульсы ШИМ –
модулятора имеют прямоугольную форму, частота их следования равна частоте «пилы». Длительность импульса зависит от времени, в течение
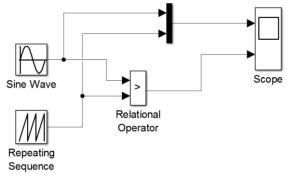
Рис. 8.1. Схема ШИМ в Simulink которого уровень модулирующего сигнала превышает уровень «пилы». В случае, когда уровень «пилы» выше уровня модулирующего сигнала, на выходе будет нулевая часть импульса.
Для получения первого представления о принципе работы ШИМ, необходимо в программной среде Matlab Simulink собрать схему, изображенную на рис. 8.1. Для наглядности аналоговый компаратор заменяется блоком сравнения Relational Operator библиотеки Similink/Logical Operations, в кото-
ром верхний вход эквивалентен неинвертирующему входу аналогового компаратора, а нижний вход, соответственно, инвертирующему. На входы блока
Relational Operator поступают:
–модулирующий сигнал синусоидальной формы с блока Sine Wave;
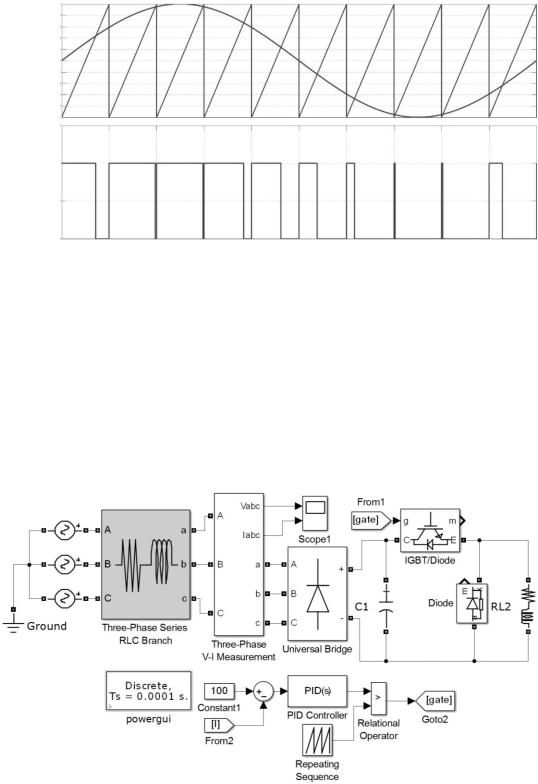
–опорный сигнал пилообразной формы с блока Repeating Sequence. Результаты моделирования схемы получения ШИМ сигнала приведены
на рис. 8.2.
Рассмотрим работу ШИМ-генератора на примере модели импульсного стабилизатора тока.
26
1.0
Uвх, 0.0
В
–1.0
1.0
Uвых,
В
0.0 |
|
0.02 |
0.0 |
0.01 |
t, c
Рис. 8.2. Результаты моделирования схемы ШИМ
На практике данный вид стабилизаторов часто применяется в системах заряда аккумуляторных батарей с целью ограничения зарядного тока, а также для ликвидации токового броска при подключении емкостной нагрузки к источнику постоянного напряжения. Как правило, для управления током нагрузки применяется единственный силовой ключ (IGBT – транзистор), управляемый ШИМ-генератором. Модель стабилизатора тока в Matlab Simulink приведена на рис. 8.3.
Рис. 8.3. Модель стабилизатора тока в Matlab Simulink
Импульсный стабилизатор тока в данном случае работает на активноиндуктивную нагрузку и имеет обратную связь по току нагрузки. Управление силовым ключом осуществляется сигналом gate.
27
8.2. Порядок выполнения работы
1.Создать новую модель в Matlab Simulink: File New Simulink Model. 2. Во вкладке Configuration Parameters/Solver задать следующие
настройки расчета переходных процессов:
Type – Fixed step; Fixed step size – 1e–4.
3. Для обеспечения работы модели добавить блок powergui со следую-
щими параметрами: Simulation time – Discrete; Solver type – Tustin; Sample time – 1e–4.
4.Собрать схему импульсного стабилизатора тока, задать параметры сети, опорного сигнала («пилы»), задания тока и нагрузки согласно варианту из таблицы вариантов.
5.Подобрать параметры ПИД-регулятора таким образом, чтобы в модели обеспечивалась стабилизация заданного значения тока. Полученные в блоке Scope графики и параметры ПИД-регулятора привести в отчете.
|
|
|
|
|
|
|
|
|
Таблица |
|
|
|
|
|
|
|
|
|
|
|
|
|
Lвх, |
Rвх, |
С1, |
|
Параметры нагрузки |
|
Параметры опор- |
|||
Вариант |
Uвх, В |
Iз, А |
ного сигнала |
|||||||
мГн |
Ом |
мФ |
|
|
||||||
|
|
Rн, Ом |
Lн, мГн |
|
Uоп, В |
fоп, кГц |
||||
|
|
|
|
|
|
|||||
1 |
2 |
0.01 |
7 |
100 |
0.01 |
10 |
100 |
1.0 |
1.0 |
|
2 |
2 |
0.01 |
7 |
120 |
0.15 |
11 |
110 |
1.5 |
1.1 |
|
3 |
2 |
0.01 |
7 |
140 |
0.20 |
9 |
120 |
1.2 |
1.6 |
|
4 |
2 |
0.01 |
7 |
160 |
0.07 |
8 |
130 |
3.0 |
1.5 |
|
5 |
2 |
0.01 |
7 |
180 |
0.13 |
7 |
140 |
1.5 |
1.4 |
|
6 |
2 |
0.01 |
7 |
200 |
0.10 |
12 |
150 |
1.5 |
1.3 |
|
7 |
2 |
0.01 |
7 |
180 |
0.13 |
13 |
160 |
2.0 |
1.7 |
|
8 |
2 |
0.01 |
7 |
160 |
0.18 |
14 |
170 |
2.5 |
1.9 |
|
9 |
2 |
0.01 |
7 |
130 |
0.09 |
15 |
180 |
1.8 |
2.5 |
|
10 |
2 |
0.01 |
7 |
100 |
0.11 |
10 |
190 |
2.5 |
2.0 |
|
8.3. Содержание отчета
1.Титульный лист.
2.Цель работы.
3.Расчетные схемы согласно варианту, выполненные в Matlab Simulink.
4.Осциллограммы исследуемых переменных.
5. Выводы по исследованию реакции импульсной системы на изменение параметров широтно-импульсного модулятора.
8.4. Контрольные вопросы
1. Дайте определение ШИМ.
28
2.Опишите алгоритм формирования синусоидального ШИМ сигнала.
3.Что представляет собой импульсный стабилизатор тока? Перечислите основные функции.
4.Перечислите основные способы поддержания качества стабилизированного тока.
5.В чем заключается опасности работы IGBT – транзистора?
29
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Афанасьев В. Н. Математическая теория конструирования систем управления: учеб. пособие. 3-е изд., испр. и доп. М.: Высш. шк., 2004.
Бесекерский В. А., Попов Е. И. Теория систем автоматического управления. 4-е изд., перераб. и доп. СПб.: Профессия, 2003.
Зайцев Г. Ф., Стеклов В. К. Компенсация естественных нелинейностей автоматических систем. М.: Энергоатомиздат, 1982.
Математические основы теории автоматического управления: учеб. в 3 т.; 3-е изд., перераб. и доп. Т. 1 / под ред. Б. К. Чемоданова. М.: Изд-во МГТУ им. Н. Э. Баумана, 2006.
Методы классической и современной теории автоматического управления: учеб. в 5 т.; 2-е изд., перераб. и доп. Т. 1. Математические модели, динамические характеристики и анализ систем автоматического управления / под ред. К. А. Пупкова, Н. Д. Егупова. М.: Изд-во МГТУ им. Н. Э. Баумана, 2004.
Мирошник И. В. Теория автоматического управления. Нелинейные и оптимальные системы. СПб.: Питер, 2006.
Пальтов И. П. Нелинейные методы исследования автоматических систем. Л.: Энергия, 1976.
Пальтов И. П., Попов Е. П. Приближенные методы исследования нелинейных автоматических систем. М.: Гос. изд-во физ.-мат. лит., 1960.
Первозванский А. А. Курс теории автоматического управления: учеб. пособие. М.: Наука, 1986.
Петров В. В., Гордеев А. А. Нелинейные сервомеханизмы. М.: Машиностроение, 1979.
Попов Е. П. Прикладная теория процессов управления в нелинейных системах. М.: Наука, 1973.
Теория автоматического управления: учеб. для вузов по спец. «Автоматика и телемеханика»: в 2 ч. Ч. II. Теория нелинейных и специальных систем автоматического управления / под ред. А. А. Воронова. М.: Высш. шк., 1986.
Юревич Е. И. Теория автоматического управления. М.: Энергия, 1969.
30