Материал: Lab_prakt_NSU_final
Преобразование релейным элементом непрерывного входного сигнала в дискретный называется квантованием по уровню.
Большинство релейных систем автоматического управления имеют структуру, приведенную на рис. 5.1. Однако возможны и более сложные системы автоматического управления, содержащие несколько релейных элементов, разделенных частями непрерывного действия.
z |
(z) |
y |
x |
|
|
Wл(p) |
Рис. 5.1. Релейная система автоматического управления
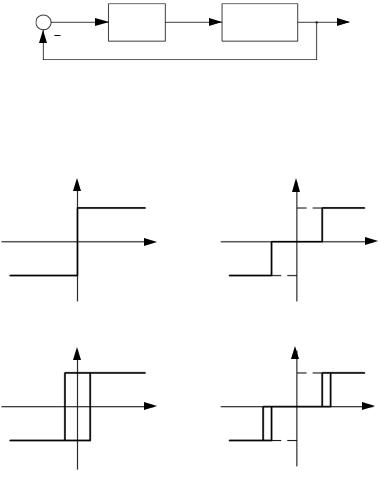
Релейный элемент – это звено релейного действия, статическая характеристика которого может иметь вид одной из характеристик, приведенных на рис. 5.2. Кроме того, релейная характеристика может быть несимметричной.
|
z |
|
|
z |
|
с |
|
с |
|
|
|
x |
–a |
x |
|
|
|
|
a |
|
–с |
|
|
–с |
|
а |
|
|
б |
|
z |
|
|
z |
с |
|
|
с |
|
–a |
a |
x |
–b –a |
x |
|
|
|
|
a b |
|
–с |
|
|
–с |
|
в |
|
|
г |
Рис. 5.2. Статические характеристики релейных элементов: а – двухпозиционное реле; б – трехпозиционное реле; в – гистерезис; г – трехпозиционное реле с гистерезисом
Релейной характеристикой могут обладать такие элементы системы автоматического управления как: реле (электрическое, пневматическое и т. д.), двигатель постоянной скорости (управляемый только командами «включен», «выключен» и, возможно, «реверс»), чувствительное звено релейного действия, полупроводниковые ключи с двумя устойчивыми режимами и др. При этом функционально элемент системы управления с релейной характеристикой может быть как звеном управляющего устройства – чувствительным, усилительным, исполнительным –, так и входить в состав объекта управле-
16
ния. Основное применение в релейных системах получили двух- и трехпозиционные релейные элементы, как с гистерезисом, так и без гистерезиса.
Звенья с релейными характеристиками часто применяются при проектировании автопилотов самолетов, систем управления космическими объектами, авторулевых судов и т. д. Кроме того, релейными характеристиками обладают многие современные системы управления электрическими машинами, в которых питание осуществляется от полупроводниковых преобразователей электрической энергии. Основными достоинствами релейных систем автоматического управления являются их простота, связанная с ней высокая надежность, а также экономичность в расходе энергии питания. При этом релейные системы позволяют осуществлять максимальное быстродействие.
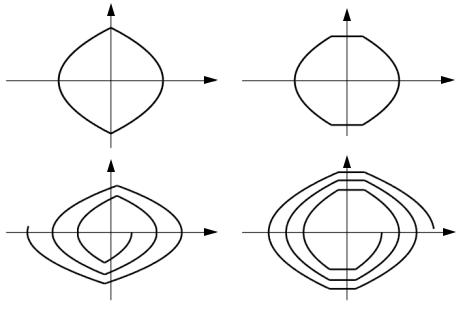
В работе исследуется влияние релейных элементов с различной характеристикой на фазовые траектории и динамику системы автоматического управления. Возможный вид фазовых траекторий системы (см. рис. 5.1) с объектом управления второго порядка приведен на рис. 5.3.
y |
y |
|
|
x |
x |
|
|
|
|
а |
|
б |
|
|
|||
y |
y |
||
|
|
||
|
x |
|
x |
в |
г |
Рис. 5.3. Фазовые траектории системы второго порядка с: а – двухпозиционным реле; б – трехпозиционным реле; в – гистерезисом; г – трехпозиционным реле с гистерезисом
Для релейных систем характерны некоторые особенности динамики. Так, например, в системах с двухпозиционным релейным элементом с одной стороны отсутствует статический режим, с другой стороны существует возможность получения эффекта вибрационной линеаризации. В системах с трехпозиционным реле благодаря наличию зоны нечувствительности принципиально возможен режим покоя без автоколебаний.
17
Как видно из рис. 5.3, вид фазовых траекторий системы зависит от типа релейного элемента. Двухпозиционному реле и трехпозиционному реле соответствует замкнутая траектория. В случае появления гистерезиса изображающая точка бесконечно удаляется от начала координат, что говорит о неустойчивости положения равновесия.
5.2.Порядок выполнения работы
1.Создать новую модель в Matlab Simulink: New Simulink Model
2.Во вкладке Configuration Parameters/Solver задать следующие настройки расчета переходных процессов: type – fixed step; step size – 1e–4.
3.Собрать четыре расчетные схемы, соответствующие структурной схеме, приведенной на рис. 5.1, согласно варианту из таблицы вариантов, с каждым из нелинейных элементов, приведенном на рис. 5.2.
4.Исследовать движение фазовых координат во времени посредством моделирования процессов в системе при отклонении системы от состояния равновесия. Для этого в окне Function Block Parametrs выходного интегратора задать начальное значение: Initial condition, равное единице.
5.Представить результаты исследования схем в виде графиков движения выходной координаты и ее производной во времени и фазовые траектории систем.
|
|
|
|
|
Таблица |
|
|
|
|
|
|
|
|
Вари- |
|
Тип релейного звена (z) |
|
|
||
Двухпози- |
Трехпозици- |
|
Трехпозиционное |
Wл(p) |
||
ант |
Гистерезис |
|||||
ционное |
онное |
с гистерезисом |
|
|||
|
|
|
||||
1 |
c=1 |
c=1, a=0.4 |
c=1, a=0.3 |
c=1, a=0.3, b=0.5 |
1/p2 |
|
2 |
c=1 |
c=1, a=0.4 |
c=1, a=0.3 |
c=1, a=0.2, b=0.5 |
5/p2 |
|
3 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
5/p2 |
|
4 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
10/p2 |
|
5 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
10/p2 |
|
6 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
5/(p2+p) |
|
7 |
c=1 |
c=1, a=0.5 |
c=1, a=0.1 |
c=1, a=0.3, b=0.5 |
5/(p2+p) |
|
8 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
5/(0.1p2+p) |
|
9 |
c=1 |
c=1, a=0.5 |
c=1, a=0.1 |
c=1, a=0.3, b=0.5 |
1/(0.1p2+p) |
|
10 |
c=1 |
c=1, a=0.1 |
c=1, a=0.1 |
c=1, a=0.1, b=0.2 |
1/(2p2+p) |
|
5.3. Содержание отчета
1.Титульный лист.
2.Цель работы.
3.Расчетные схемы согласно варианту, выполненные в Matlab Simulink.
18
4.Графики движения выходной координаты и ее производной во времени и фазовых траекторий по каждой схеме.
5.Вывод уравнений фазовых траекторий.
6.Выводы по влиянию вида релейного элемента на вид переходного процесса.
5.4.Контрольные вопросы
1.Общие свойства фазовых траекторий.
2.Типы особых точек фазовых траекторий системы второго порядка.
3.Методы построения фазовых траекторий.
4.Аналитическое описание релейных элементов.
5.Связь фазовых траекторий и изменения фазовых координат во време-
ни.
ЛАБОРАТОРНАЯ РАБОТА № 6: ИССЛЕДОВАНИЕ СИСТЕМЫ С ПЕРЕМЕННОЙ СТРУКТУРОЙ
Цель работы: исследование скользящих режимов в системах с переменной структурой методом фазовой плоскости.
6.1. Общие сведения
Применение систем с переменной структурой позволяет получить высокое быстродействие, т. е. протекание процессов за минимальное время при незначительных колебаниях, а в отдельных случаях и при отсутствии коле-
баний выходных координат в уста- |
|
|
k1 |
|
|
|
|
|
|
новившихся режимах. В работе рас- |
|
|
|
ОУ |
сматривается два варианта движений |
|
|
|
|
|
|
k2 |
|
|
|
|
|
||
в системе с переменной структурой, |
|
|
УП |
|
которые в общем случае могут быть |
|
|
|
|
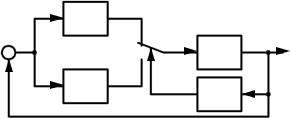
представлены на рис. 6.1, где введе- |
Рис. 6.1. Система с переменной структурой |
|||
ны следующие обозначения: ОУ – объект управления; УП – устройство переключения; k1 и k2 – коэффициенты регулятора.
Допустим, объект управления – это система второго порядка, не обла-
дающая при постоянной структуре собственной устойчивостью |
|
x kx 0 . |
(6.1) |
19 |
|
Фазовые траектории системы (6.1) будут представлять собой концентрические эллипсы. С помощью регулятора k1 обеспечим системе движение, при котором фазовая траектория будет представлять собой эллипс, вытянутый вдоль оси y x . С регулятором k2 система тоже неустойчива, а ее фазовой траекторией будет эллипс, вытянутый вдоль оси x.
Если управляющее устройство обеспечит переключения по следующему алгоритму: при попадании изображающей точки на ось x включается регулятор k2 , а на ось x – регулятор k1 , то система будет асимптотически устойчи-
вой. Математическая форма записи описанного алгоритма примет вид: |
|
|
x k1kx 0, xx |
0, |
(6.2) |
|
|
|
x k2kx 0, xx |
0. |
|
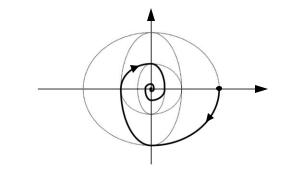
Таким образом, первый регулятор будет действовать в первом и третьем квадрантах фазовой плоскости, а второй – во втором и четвертом. Движение изображающей точки на фазовой плоскости будет происходить так, как показано на рис. 6.2. Из приведенного рисунка следует, что система становится асимптотически устойчивой, но устойчивого положения равновесия она достигает только при t .
Однако наибольшее распространение получили системы с другим видом движения, который получил
название скользящего режима. Такой режим позволяет привести изображающую точку в начало координат за минимальное число переключений, т. е. устранить колебательные процессы. При этом изменяется не структура си-
стемы, а закон переключения. Два регулятора по-прежнему являются неустойчивыми. Один регулятор должен обеспечить движение изображающей точки по фазовой траектории типа «седло», а второй – по фазовой траектории типа «центр». Например, организуем переключения в системе (6.1) таким образом, что
x k1kx 0, x x x 0, |
(6.3) |
|||
x k kx 0, x x |
x 0. |
|||
|
||||
|
1 |
|
|
|
20