Материал: Kursovaya
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Петербургский государственный университет путей сообщения императора Александра I»

Кафедра «Методы и приборы неразрушающего контроля»
Пояснительная записка к курсовому проекту
по дисциплине
«Основы проектирования приборов и систем»
Выполнил ст.гр. ПБ-713._____________________________ Сабитов И.А.
Проверил преп.________________________________________ Теплякова А.В.
Санкт-Петербург 2021
Оглавление
Введение 2
Расчет параметров контроля и определение основных технических характеристик дефектоскопа. 3
Расчет максимальной длительности развертки. 3
Выбор рабочей частоты 3
Выбор частоты следования зондирующих импульсов 4
Расчет параметров схемы временной селекции 4
Определение коэффициента усиления усилителя высокой частоты 4
Разработка функциональной схемы аналогового дефектоскопа 6
Разработка структурной схемы цифрового дефектоскопа. 8
Разработка «технического задания» на дефектоскоп 11
Библиографический список 12
Приложение 1 13
Приложение 2 22
Приложение 3 24
Введение
Задание на курсовой проект – разработать дефектоскоп и техническое задание (ТД) на прибор для контроля ободьев цельнокатаных колес вагонов пьезоэлектрическим преобразователем П121-2,5-400
Цель работы – освоить основные этапы разработки и постановки на производство специализированного ультразвукового дефектоскопа реализующего поставленные задачи контроля объектов.
Актуальность темы
Колесная пара – ответственнейшая деталь вагона, от исправной работы которой зависит безопасность движения поездов, а замена даже одного из ее элементов представляет собой серьезную экономическую задачу. К сожалению, колесные пары зачастую выходят из строя. Чтобы избежать жертв и большую трату денежных средств, проводят контроль колесной пары, а в частности – ободьев цельнокатаных колес.
Расчет параметров контроля и определение основных технических характеристик дефектоскопа.
Основные параметры контроля определяются соответствующими параметрами аппаратуры. Основные технические характеристики импульсных дефектоскопов в настоящее время установлены ГОСТ 23049-84. Основные технические характеристики специализированных дефектоскопов устанавливаются в технических условиях на эти приборы.
Для расчетов всех параметров контроля необходимо знать путь по лучу (рис. 1.1), а так же геометрические размеры объекта контроля (ОК) (рис.1.2).
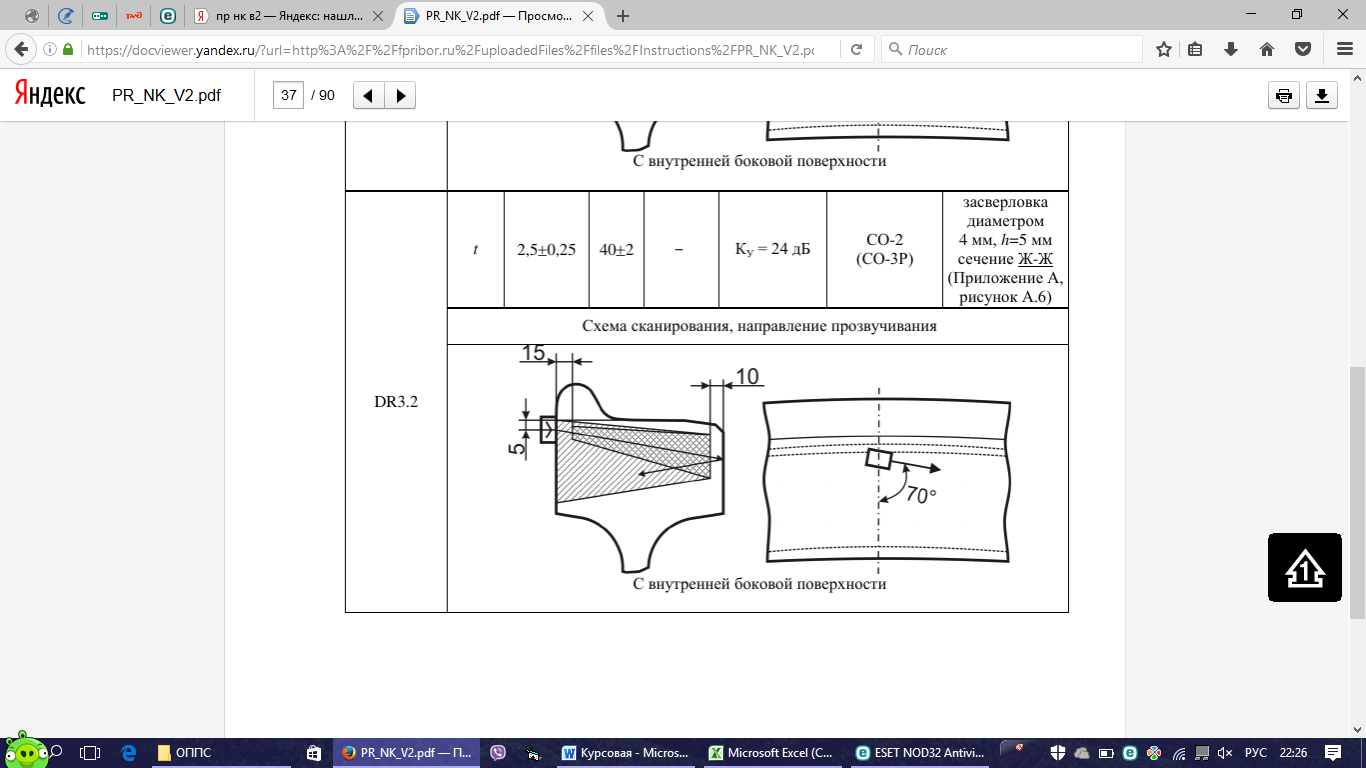
Рисунок 1.1 Схема контроля обода цельнокатаного колеса
DR3.2 – контроль с внутренней боковой поверхности обода поперечными волнами при установке ПЭП под уровнем поверхности катания сканировании по окружности с целью выявления внутренних несплошностей в основном сечении обода.
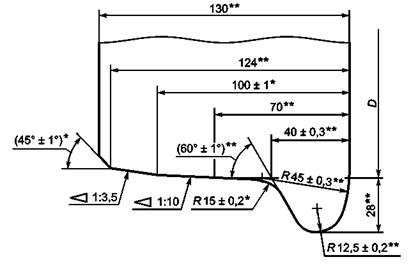
Рисунок 1.2. Геометрические размеры обода цельнокатаного колеса
Расчет максимальной длительности развертки.
Максимальная длительность развертки рассчитывается исходя из анализа схемы прозвучивания объекта контроля. Максимальная длительность развертки или «зона контроля» должна быть не менее чем время распространения ультразвука до максимально удаленного дефекта и обратно, т.е. h = 130∙cos(40)∙2 = 200 мм.
1.2. Выбор рабочей частоты.
Рабочая частота выбирается, исходя из неравенства:
 (1.1)
(1.1)
где:
b - размер минимального недопустимого дефекта, мм (из ГОСТ 10791-2011 Колеса цельнокатанные; для колес категории В диаметр эталонного отражателя в СО-2 равен 4 мм, а по СО-3Р равен 6 мм);
с – скорость распространения ультразвука в материале изделия, м/сек;
fр – рабочая частота, МГц.

Так как в задании дан преобразователь на частоту 2.5МГц, то рабочую частоту берем 2.5МГц.
1.3. Выбор частоты следования зондирующих импульсов.
Период следования зондирующих импульсов определяется по формулам (1.2, 1.3) для ручного контроля.
 (1.2)
(1.2)
 (1.3)
(1.3)
где:
Тсл – период следования зондирующих импульсов, МГц;
H – размер изделия в направлении прозвучивания мм;
m – количество донных импульсов; выбирается с учетом размеров изделия;
m = 4 если Н ≤ 0.5 м; m = 2 если 0,5 < Н ≤ 2,5 м; m = 1 если Н > 2,5 м;
τи – длительность зондирующего импульса, мкс;
n´ - количество периодов зондирующего импульса; n´ = 4 ÷ 8, если Н ≤ 0,5 м; n´ = 8 ÷ 16, если Н > 0,5 м.
Δt – временной интервал, гарантирующий несовпадение последнего эхо импульса предыдущего цикла «излучения-приёма», с зондирующем импульсом следующего цикла «излучения-приёма» ~ 10 мкс. Циклом «излучения – приема» называется временной интервал между двумя последовательными зондирующими импульсами.
Расчет:

 .
.
Рассчитаем частоту следования:
 =
=
 =
2,4 кГц
=
2,4 кГц
Расчет параметров схемы временной селекции
Параметры схемы временной селекции рассчитываются на основе анализа схемы прозвучивания объекта контроля. В результате расчета были определены:
количество стробов 2;
диапазоны регулировки длительности стробов и их задержки в соответствии с расчетом развертки.
Определение коэффициента усиления усилителя высокой частоты.
Коэффициент усиления усилителя высокой частоты определяется по формуле (1.5).
 (1.5) Umin
= UЗИ
(1.5) Umin
= UЗИ Sa´
Sa´
 (1.6) где:
(1.6) где:
Uвых – амплитуда эхосигнала на выходе усилителя высокой частоты определяется элементной базой. Обычно 4 ÷ 5 В достаточно для подачи на аналогово-цифровой преобразователь (АЦП);
Umin – минимальная амплитуда эхосигнала от дефекта рассчитывается по UЗИ – амплитуда зондирующего импульса: UЗИ = 100 ÷ 200В для объектов Н ≤ 1 м; UЗИ = 200 ÷ 400 В для объектов Н ≥ 1м.
- коэффициент прозрачности;
Sa´ - площадь мнимого излучателя, мм2;
b - размер минимального недопустимого дефекта, мм;
λ – длина волны, мм;
Δr – путь ультразвука в мнимом излучателе, мм;
δ – коэффициент затухания, дБ/м;
A, y, x, (1+q) – коэффициенты, зависящие от выбранной модели дефекта.
Расчет:
Umin
=
 =
0,09143 В
=
0,09143 В
КУВЧ = 20lg( = 32.8 дБ
= 32.8 дБ
На основании расчетов основных параметров контроля определи основные технические характеристики проектируемого дефектоскопа и оформили в табличной форме. Основные технические характеристики дефектоскопа представлены в Приложении 1.
Разработка функциональной схемы аналогового дефектоскопа
Функциональная схема специализированного дефектоскопа проектируется на основании анализа задач контроля, схем прозвучивания и расчета параметров контроля
 Рисунок
2. Функциональная схема типового эхо –
импульсного дефектоскопа общего
назначения
Рисунок
2. Функциональная схема типового эхо –
импульсного дефектоскопа общего
назначения
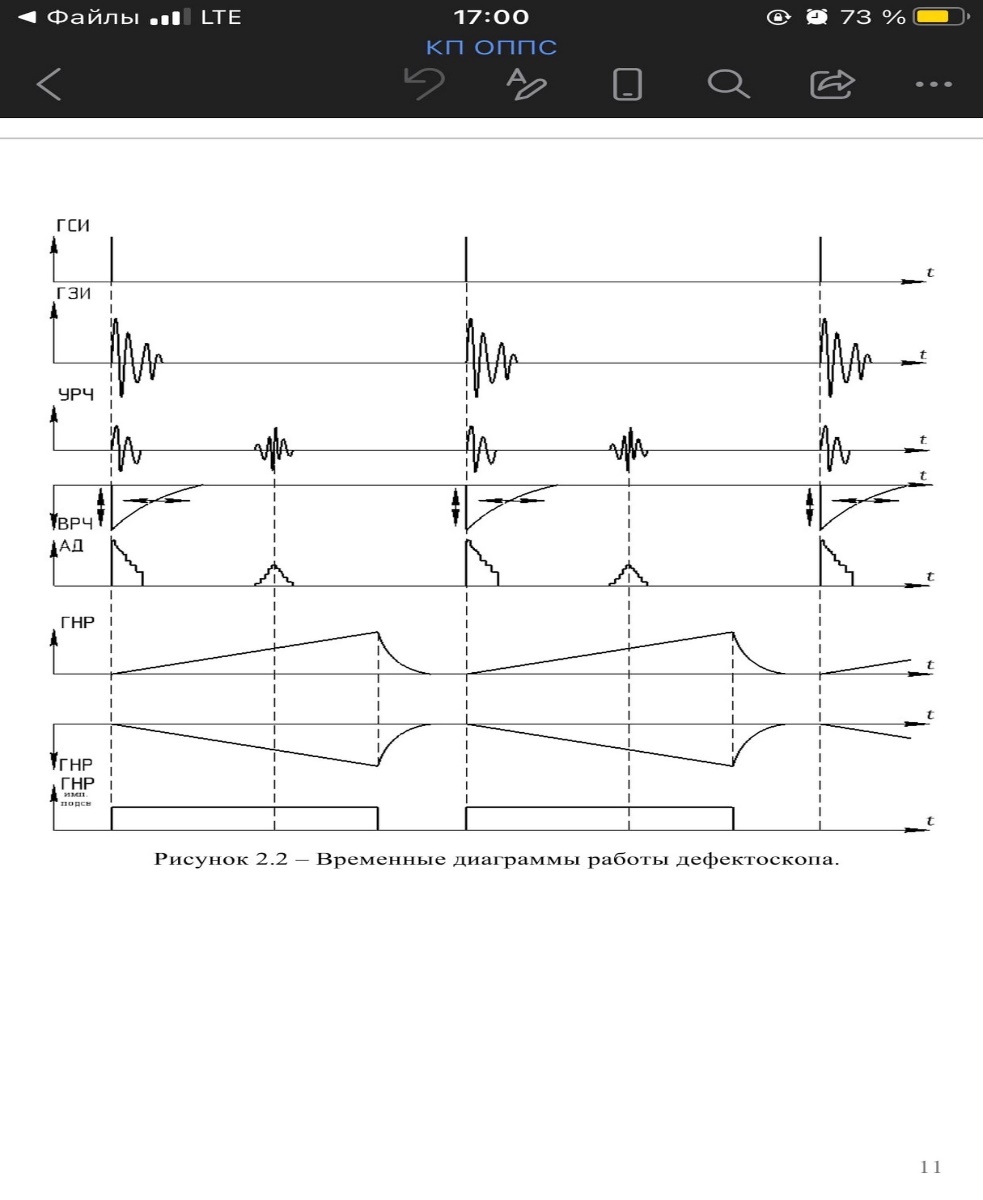
Задающим узлом дефектоскопа является генератор синхроимпульсов (ГСИ), работающий в автоколебательном режиме. ГСИ вырабатывает последовательности электрических импульсов с надлежащими временными сдвигами между ними, обеспечивая согласование во времени всех блоков. Он периодически запускает генератор импульсов возбуждения (ГИВ), схему автоматической сигнализации дефектов (АСД), глубиномер, схему временной регулировки чувствительности (ВРЧ) и генератор напряжения развертки (ГНР). ГИВ предназначен для формирования высоковольтных импульсов малой длительности (0,2-3 мкс), которые используются для возбуждения колебаний излучающего преобразователя (несущая частота импульсов (частота высокочастотных колебаний, заполняющих импульс) подстраивается индуктивностью, монтируемой либо в приборе, либо в преобразователе. Генерируются экспоненциальные затухающие или, более рациональные энергетически, колоколообразные импульсы.); система АСД предназначена для автоматической фиксации момента обнаружения дефекта; ГНР обеспечивают временную развёртку, при которой перемещение луча по экрану пропорционально времени. В приемном тракте принятые сигналы проходят: ограничение, через ограничитель – устройство, защищающий приемный тракт от зондирующего импульса (ЗИ); ослабление, с помощью аттенюатора – устройство для калиброванного ослабления сигналов; усиление, благодаря системе УВЧ (усилитель высокой частоты); детектирование, через амплитудный детектор – устройство, выделяющее из амплитудно-модулирующего ЗИ колебание, моделирующее сигнал; одностороннее ограничение, с помощью отсечки и дополнительное усиление. Только импульс ВРЧ (временная регулировка чувствительности) предназначен для коррекции усиления и является в этом тракте служебным (выравнивает амплитуды сигналов от дефектов, залегающих на разной глубине). Сигналы же схемы АСД и ГНР полностью является служебным и предназначены для селекции и наглядного представления сигналов на экране дефектоскопа. В универсальных дефектоскопах можно менять параметры служебных импульсов в значительных пределах.
Разработка структурной схемы цифрового дефектоскопа.
В цифровом дефектоскопе (рис. 3) служебные функции реализуются программно. Например: вместо временного селектора на базе двух генераторов прямоугольных импульсов и схемы «И» программно задается алгоритм предусматривающий:
анализ временного положения эхо-сигнала относительно зондирующего импульса;
оценку амплитуды эхо-сигнала и сравнение с заданным пороговым уровнем (порог АСД).
включение звукового индикатора при превышении амплитуды эхо - сигнала выше порога АСД и находящегося в зоне АСД.
В то же время передающий и приемный тракт остаются аналоговыми, но с цифровым управлением. С целью исключения взаимного влияния аналоговой части на цифровую и наоборот предусматривают раздельные шины питания. Синхронизация работы всех блоков дефектоскопа выполняют путем деления частоты тактового генератора микропроцессора. Кроме того, необходимы меры для минимизации (устранения) цифрового шума в момент перехода электрических ключей с «0» положения на «1» и обратно.