Материал: 4077
шим и наименьшим значением из списка.
1.1.11 Разбить все данные по классам, для чего:
-определить размер класса (U) так, чтобы размах R делился на интервалы равной ширины. Для этого R делят на одно из чисел: 0.1; 0.2; 0.5; 1; 2; 5; 10 и т.д. так, чтобы получилось 5…10 интервалов равной ширины;
-определить границы классов, чтобы они включали наибольшее и наименьшее значения, и положить их в основу таблицы частот: сначала определите нижнюю границу первого класса и прибавьте к ней ширину класса. Далее, продолжая прибавлять найденный интервал к предыдущему значению для получения второй границы, третьей и т.д.
-вычислить середины классов по формуле: средняя точка первого класса
=сумме верхней и нижней границ класса, деленная на 2.
1.1.12 Построить таблицы и столбиковую диаграмму частот. 1.1.13 Сделать выводы.
1.1.14 Составить отчет о проделанной работе.
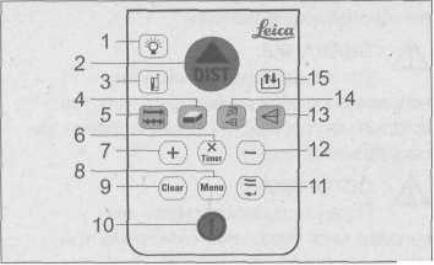
1.2 Устройство ручного лазерного дальномера «DISTOTMclassic5» 1.2.1 Клавиатура (рисунок 1).
Рисунок 1 – Устройство клавиатуры: 1 – подсветка; 2 – измерение; 3 – точка отсчета; 4 – площадь, объем; 5пп – измерение расстояний, трекинг; 6 – умножение [х] / таймер; 7 – плюс[+];8 – меню; 9 – сброс; 10 – клавиша вкл. / выкл.; 11 – Равно, подтв. выбора (Enter); 12 – минус [–]; 13 – функции; 15 – Мин. / макс. – трекинг; 16 – память, стек
6
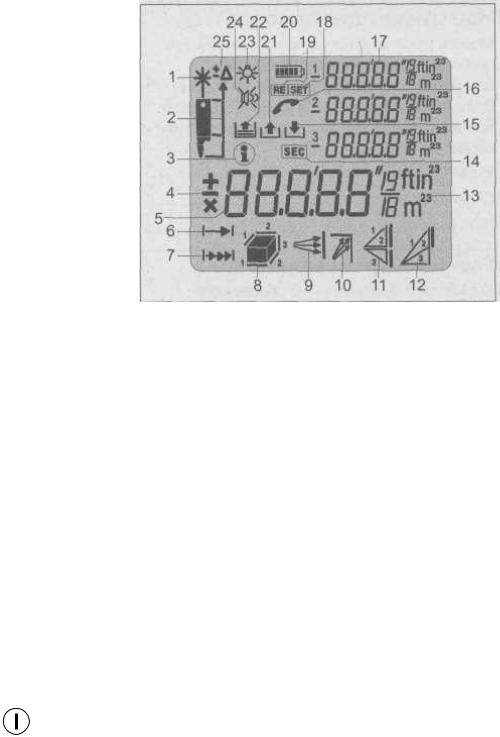
1.2.2 Показания дисплея (рисунок 2)
Рисунок 2 – Показания дисплея: 1 – лазер включен; 2 – точка отсчета (от объектива/ от винта штатива/ от задней пятки); 3 – информация; 4 – отображение математических операций или знаков; 5 – основное показание (напр. измеренное расстояние); 6 – измерение расстояния; 7 – трекинг; 8 – площадь/ объем; 9 – мин. трекинг; 10 – макс, трекинг; 11 – пифагор (тритоном, функции); 12 – измерение отрезка высоты (Пифагор); 13 – ед. измерения с указ. степени (2/3); 14 – таймер автопуска; 15 – сохранение констант; 16 – обратитесь в сервисный центр; 17 – 3 дополнительных показания (напр. промежуточные значения); 18 – (SET) Пользовательские настройки; 19 – (RESET) Установка заводских настроек; 20 – показание состояния батареи; 21 – вызов сохраненных констант (макс. 10); 22 – вызов последних 15 значений; 23 – подсветка (вкл. / выкл.); 24 – звуковой сигнал (вкл. / выкл.); 25 – установка смещения.
1.3 Принцип работы ручного лазерного дальномера «DISTOTMclassic5» 1.3.1 Включение / выключение «DISTOTMclassic5».
Коротко нажмите.
Пиктограммы подсветки, напряжения питания и звукового сигнала находятся на дисплее до первого нажатия клавиши.
Прибор может быть выключен в любом пункте меню.
 Если не будет нажата никакая клавиша, то через 90 секунд произойдет автоматическое отключение.
Если не будет нажата никакая клавиша, то через 90 секунд произойдет автоматическое отключение.
7
1.3.2 Клавиша «Сброс».
 Клавиша «Сброс» переводит прибор в основной режим, т.е. показания обнуляются (=Сброс).
Клавиша «Сброс» переводит прибор в основной режим, т.е. показания обнуляются (=Сброс).
Это можно сделать как до, так и после измерения / вычисления. В режиме меню происходит возврат к основному режиму.
При выполнении какой-либо функции (вычисление площади, объема или Пифагор) отдельные измерения могут быть пошагово отменены и проведены заново.
При настройке меню происходит сброс, если ввод не завершается нажатием клавиши «Равно» / подтверждение выбора (Enter).
1.3.3 Подсветка дисплея.
Коротко нажмите.
Подсветка включается и выключается нажатием клавиши.
 При отсутствии команды с клавиатуры подсветка выключается через 30 секунд.
При отсутствии команды с клавиатуры подсветка выключается через 30 секунд.
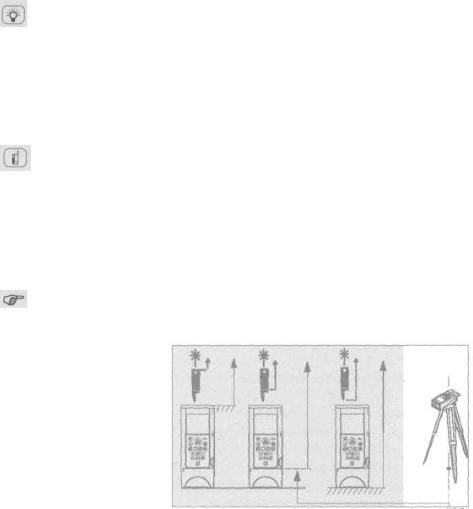
1.3.4 Установка точки отсчета (рисунок 3).
Нажимайте, пока на дисплее не появится нужная точка отсчета.
 На задней стороне прибора находится отверстие с резьбой 1/4" для фотоштатива.
На задней стороне прибора находится отверстие с резьбой 1/4" для фотоштатива.
 Выбранная установка сохраняется, пока не происходит изменение точки отсчета либо автоматическое или ручное выключение прибора.
Выбранная установка сохраняется, пока не происходит изменение точки отсчета либо автоматическое или ручное выключение прибора.
Установка по умолчанию: точка отсчета от задней пятки
от |
от винта |
от задней |
объектива |
штатива |
пятки |
Рисунок 3 – Возможные установки 1.3.5 Измерение.
8
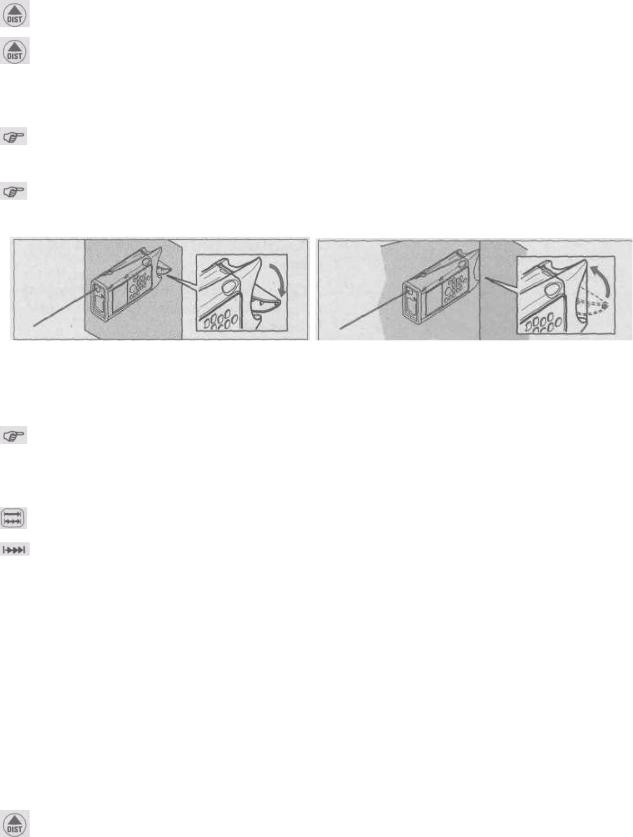
1.3.5.1 Измерение расстояния (рисунок 4).
Нажмите, включается лазер, прибор находится в «режиме визирования».
При повторном нажатии производится измерение расстояния.
После этого на дисплее появляется результат в выбранной единице измерения.
Если прибор включен, а лазер нет, то прибор находится в «основном ре-
жиме».
Если лазер включен, то прибор находится в «режиме визирования».
а) |
б) |
Рисунок 4 – Измерение |
расстояния: а) на ровных поверхностях; б) от углов |
Для стабильного плотного прилегания повернуть вращающуюся пятку на
90°.
1.3.5.2 Непрерывные измерения (трекинг). Нажимайте до появления этой пиктограммы на дисплее.
 Начинается непрерывное измерение, и текущий результат отображается на дисплее.
Начинается непрерывное измерение, и текущий результат отображается на дисплее.
 Нажмите, чтобы завершить трекинг. Последний результат находится на дисплее.
Нажмите, чтобы завершить трекинг. Последний результат находится на дисплее.
Пример: разбивка расстояния (рисунок 5). 1.3.5.3 Непрерывная работа лазера.
 Нажимайте клавишу, пока не раздастся длинный звуковой сигнал. Включился режим непрерывной работы лазера.
Нажимайте клавишу, пока не раздастся длинный звуковой сигнал. Включился режим непрерывной работы лазера.
При каждом следующем нажатии производится измерение расстояния.
9
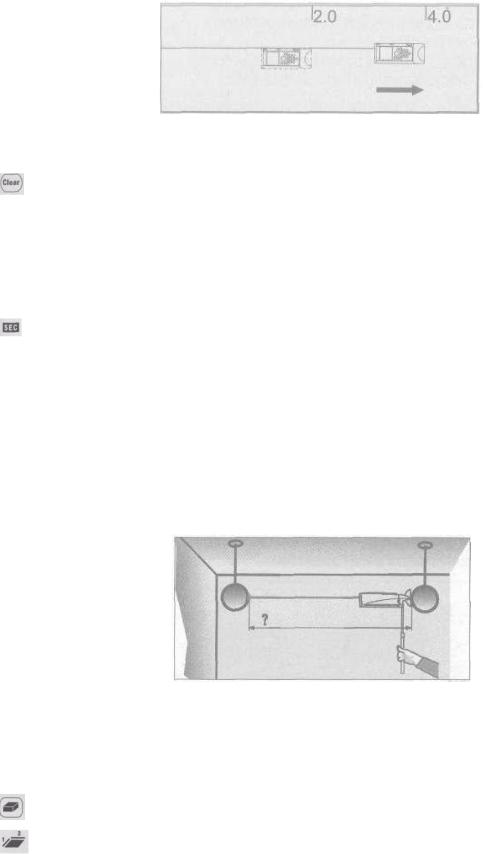
Рисунок 5 – Разбивка расстояния
Нажмите, чтобы завершить непрерывную работу лазера. 1.3.5.4 Таймер автопуска.
Прибор должен находиться в режиме визирования.
 Держите в нажатом состоянии, пока не получите желаемое время задержки (макс. 60 секунд).
Держите в нажатом состоянии, пока не получите желаемое время задержки (макс. 60 секунд).
На дисплее появляется эта пиктограмма.
Когда Вы отпустите клавишу, начнется обратный отсчет секунд (напр. 59, 58, 57...), остающихся до измерения.
Отсчет последних 5 секунд сопровождается звуковым сигналом.
После последнего сигнала производится измерение, полученный результат выводится на дисплей.
Пример: измерение без нажатия клавиш. (рисунок 6).
Рисунок 6 – Измерение без нажатия клавиш
1.3.6 Вычисления. 1.3.6.1 Площадь.
Нажимайте, пока эта пиктограмма не появится на дисплее".
Измеряемая сторона на пиктограмме мигает.
Выполните 2 измерения (дл. х шир.). Окончательный результат и оба промежуточных появятся на дисплее.
10