Материал: 2385
был разработан навигационный кодовый приемник GPS, геодезисты успели разработать и создать геодезический фазовый приемник Макрометр.
Спутниковая система является высокоточной, поскольку работает в диапазоне сверхвысоких частот. Одновременно она является глобальной, потому, что в любой точке земной поверхности над горизонтом всегда находятся несколько спутников системы. По геометрической сути спутниковая система является дальномерной. Можно было бы сказать, что измеряют расстояния от приемника до спутников и местоположение приемника определяют линейной засечкой. Однако такое утверждение верно лишь в первом приближении. На самом деле, как сказано ранее, в геотронике измеряют не расстояние, но величины, функционально с ними связанные. По физической или аппаратурной сути спутниковая система является беззапросной. Опорные генераторы спутника и приемника независимы и успешное выполнение измерений требует, чтобы их рассинхронизация была учтена. Система работает в трех неразрывно связанных режимах. Связь между режимами осуществляет, в основном, программное обеспечение.
1. Общие принципы построения глобальных спутниковых систем позиционирования
При реализации метода одностороннего измерения расстояний (ρ=ct, где c- скорость сигнала, t- время его прохождения ) спутниковая радиодальномерная система распадается на две основные составные части: устанавливаемое на спутнике передающее устройство и находящийся в распоряжении наземного потребителя приемно-вычислительный комплекс. Вместе с тем для поддержания постоянной работоспособности такой спутниковой системы без ухудшения основных ее технических показателей возникает необходимость в использовании служебной подсистемы управления и контроля. Таким образом, современные спутниковые системы позиционирования включают в себя три основные составные части (рис. 10.1), получившие название секторов:
космический сектор;
сектор управления и контроля;
сектор потребителя.
152
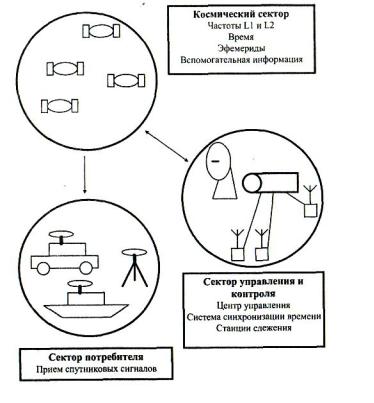
Рис. 10.1 Схема построения спутниковых систем позиционирования
Космический сектор включает в себя набор входящих в систему
позиционирования спутников. Такой набор называют «созвездием». Установленная на спутниках аппаратура, выполняет роль передающей части одностороннего радиодальномерного комплекса и осуществляет передачу на Землю радиосигналов, на основе которых измеряется расстояние между спутником и наземным пунктом наблюдения. Передаётся также навигационное сообщение, в котором содержится информация об эфемеридах спутников, о поправках к показаниям его часов и об альманахе, несущем в себе усеченную информацию обо всех входящих в «созвездие» спутниках.
Особенности построения и функционирования космического сектора неразрывно связаны с общими требованиями, которые предъявляются ко всей спутниковой системе позиционирования. В частности, первоначальное назначение систем GPS и ГЛОНАСС состояло в том, чтобы обеспечить получение навигационной информации о местах нахождения разнообразных мобильных объектов военного назначения, расположенных в любых точках земного шара, и, прежде всего, находящихся в открытом море судов военно-морского флота. Однако по мере освоения таких систем сфера их применения постоянно расширялась, охватив при этом самые разнообразные области использования таких систем в геодезии, топографии и аэрофотосъемке. При проектировании космического сектора наряду с разработкой аппаратуры, устанавливаемой на спутниках, большое значение имеют расчет орбит и определение количества входящих в «созвездие» спутников. В качестве исходных предпосылок были приняты при этом следующие положения:
Опыт эксплуатации более ранних спутниковых навигационных систем показал, что высота орбиты относительно земной поверхности равная примерно 20 000 км является наиболее оптимальной. Характерный для такой высоты 12-часовой период обращения спутников вокруг земного шара создает определенные удобства, как при обслуживании спутников, так
153
и при их использовании потребителями.
Для обеспечения возможности одновременных наблюдений не менее 4-х спутников в любой точке земного шара необходимо, чтобы общее количество входящих в «созвездие» спутников составляло не менее 24.
Для минимизации влияния геометрии расположения наблюдаемых спутников на точность выполняемых измерений количество орбит и места расположения на них спутников должны обеспечивать по возможности равномерное их распределение в поле обозреваемого небосвода.
Учитывая эти требования, спутники в системе GPS размещены на шести орбитах, плоскости которых смещены относительно друг друга на 60 градусов. При этом в каждой соседней орбитальной плоскости положение спутников смещается примерно на 40 градусов. Применительно к системе ГЛОНАСС было выбрано три развернутых на 120 градусов орбитальные плоскости, на которых размещаются по 8 спутников, отстоящих друг от друга на 45 градусов. Перечисленные выше соображения учитывались как в процессе проектирования космического сектора, так и при вводе его в эксплуатацию
Сектор управления и контроля состоит из центральной (ведущей) станции и
нескольких разнесенных на большие расстояния станций слежения, причем некоторые из них выполняют роль и загружающих станций. Основная цель этого сектора состоит в осуществлении контроля за работоспособностью спутников, систематическом уточнении эфемерид каждого спутника и параметров принятой модели атмосферы, а также в корректировке показаний часов, установленных на каждом спутнике. периодическом обновлении Содержание навигационного сообщения периодически обновляется и передаётся с помощью загружающих станций на каждый из обслуживаемых спутников.
Для поддержания постоянной работоспособности всего космического сектора и для систематического обновления передаваемой потребителю информации, которая нуждается в периодической корректировке, в современных глобальных спутниковых системах позиционирования предусматривается специальный постоянно действующий сектор, получивший название сектора управления и контроля. Данный сектор призван выполнять следующие функции:
осуществлять непрерывное отслеживание всей передаваемой спутниками информации;
производить обобщение и анализ такой информации с целью своевременной корректировки всех используемых при дальнейшей обработке показателей;
на основе выполняемого анализа предсказывать эфемериды наблюдаемых спутников и передаваемое со спутников потребителям точное время;
через строго определенные интервалы времени формировать обновленные навигационные сообщения и передавать такие сообщения по радиоканалу на соответствующие спутники;
выявлять неисправности в работе спутников и принимать меры по их устранению;
осуществлять корректировку орбит спутников не только за счет введения соответствующих поправок, но и посредством дистанционного управления
реактивным двигателем, находящимся на борту спутника.
Среди различных контролируемых и корректируемых параметров повышенное внимание уделяется периодическим уточнениям эфемерид и показаний часов спутников. Определение уточненных текущих значений эфемерид отдельных спутников, используемых при вычислении соответствующих поправок в предсказанные их значения, осуществляется методом пространственной линейной засечки. При этом производятся одновременные измерения расстояний до
154
конкретного спутника, по крайней мере, с трех находящихся на земной поверхности пунктов, координаты которых хорошо известны. Корректировка показаний спутниковых часов осуществляется посредством сравнения принятых по радиоканалу отсчетов времени по этим часам с соответствующими показаниями наземных опорных часов, входящих в состав сектора управления и контроля.
Наряду с отмеченными показателями данным сектором постоянно контролируются и корректируются поправки, обусловленные влиянием атмосферы.
Реализация перечисленных функций рассматриваемого сектора базируется на четком взаимодействии входящих в этот сектор таких станций различного назначения, как станции слежения, ведущая станция и загружающие станции.
Сектор потребителя объединяет в себе всю совокупность широко
распространенной аппаратуры пользователей, с помощью которой осуществляется прием радиосигналов от спутников и вычисление на их основе интересующих потребителя конечных результатов. К ним относятся: местоположение пункта наблюдений и характерное для той или иной эпохи точное время, а при установке приемной аппаратуры на движущемся объекте — скорость его перемещения и направление движения. Упомянутая аппаратура позволяет также определить и целый ряд других вспомогательных параметров.
Среди основных составных частей глобальных систем позиционирования наибольший интерес для пользователей представляет приемно-вычислительный комплекс, составляющий основу сектора потребителя. Этот сектор объединяет в себе все компоненты, позволяющие потребителю получать интересующую его информацию о местонахождении пункта наблюдений, о показаниях точного времени, а применительно к движущим объектам — скорость и направление их перемещения.
Специфика работы приёмно-вычислительного комплекса существенно зависит от той категории потребителей, на которые принято их подразделять. В частности, эксплуатируемые в настоящее время системы GPS и ГЛОНАСС, представляют собой системы двойного назначения, т. е. ориентированы на их использование, как военными, так и гражданскими пользователями. Характерная особенность работы аппаратуры, предназначенной для военных пользователей, состоит в том, что эта аппаратура должна работать оперативно и надежно в условиях проведения военных действий, обеспечивая при этом требуемую точность местонахождения не только неподвижных пунктов наблюдения, но и также таких движущихся объектов, как летательные аппараты, различного рода плавсредства и наземный транспорт. Применительно к таким условиям принимаются все меры для того, чтобы использование рассматриваемой системы позиционирования было недоступным для потенциального противника. Гражданские пользователи упомянутых выше систем подразделяются на две основные подгруппы. Первая из них ориентирована на использование таких систем в навигации, а вторая — в геодезии.
2. Основные разновидности дифференциальных методов
При выполнении одновременных спутниковых измерений, в которых участвуют несколько спутников и несколько приемников, возможна организация различных вариантов разностных отсчетов. К таким могут быть отнесены следующие варианты:
разности результатов, получаемых на различных точках стояния спутниковых приемников при одновременных наблюдениях одного и того же спутника;
разности результатов, получаемые с помощью одного приемника при
155
одновременных наблюдениях двух или более спутников;
разности результатов, получаемых при использовании одного приемника и при наблюдениях одного спутника, относящихся к различным моментам времени (эпохам);
комбинирование результатов, получаемых при использовании различных видов измерений (например, измерений, выполняемых на основе кодовых
методов и определений фазы несущих колебаний).
Возможны также и другие комбинации образования разности отсчетов (в частности, разности результатов, получаемых на двух различных несущих частотах L1 и L2).
При реализации первого варианта открывается возможность исключить те смещения в значениях регистрируемых величин, которые связаны с несовершенством работы спутниковой аппаратуры. К ним могут быть отнесены погрешности показаний спутниковых часов на момент выполнения измерений. Кроме того, существенно ослабляются требования к точности знания эфемерид спутника.
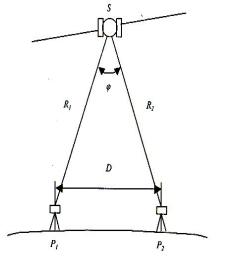
Если предположить, что расстояния от спутника S до двух точек на земной поверхности Р1 и Р2 приближенно равны друг
Рис. 10.2 Схема реализации |
другу (R1 ~ R2~ R), а угол, под которым наблюдается |
||||||||
базис D, остается постоянным на небольших отрезках |
|||||||||
дифференциального метода |
|||||||||
расчетной траектории, |
|||||||||
|
|||||||||
|
|
D |
|
|
|
||||
|
R |
|
|
|
|||||
то непосредственно из рис. 10.2 следует, что: |
|
|
|
|
|
(10.1) |
|||
|
|
|
|
||||||
|
|
D |
|
|
|
R |
|
||
|
|
D |
|
R |
|
||||
|
|
|
|
|
|||||
Погрешность знания передаваемых по радиоканалу эфемерид, а следовательно, и возникающих при этом погрешностей в значении измеряемых расстояний δR оценивается в первом приближении величиной около 20 м. Поскольку для систем GPS и ГЛОНАСС R ~ 20 000 км, то dR/R ~10-6. С учетом этого при использовании дифференциального метода представляется возможным получать как длины базисных линий, так и разности координат между двумя пунктами на уровне одной миллионной, не прибегая к принятию специальных мер по уточнению имеющихся в распоряжении потребителя значений эфемерид спутника.
Применение дифференциального метода позволяет резко уменьшить влияние атмосферы на разностные результаты, так как в данном случае необходимо учитывать не абсолютные значения задержек радиосигналов при их прохождении через атмосферу, а только разности этих задержек, которые при сравнительно небольших расстояниях между станциями характеризуются сравнительно малыми величинами
Основной недостаток рассмотренного дифференциального метода заключается в возможности определения только разностей координат между пунктами, а не их абсолютных значений.
Характерная особенность второго варианта, подразумевающего вычисление конечных результатов при использовании разностей измерений до двух спутников, состоит в том, что эта разность позволяет исключить поправки, обусловленные
156