Материал: 2258
требования к рабочему температурному режиму, пылезащищенности и влагостойкости усилителя.
Взависимости от конструкции электромеханичекого привода усилители можно разделить на редукторные и безредукторные.
Вредукторном ЭМУРе исполнительный электродвигатель через редуктор, обычно червячную передачу, связан с рулевым механизмом.
Втаких конструкциях необходимо обеспечение значительной частоты вращения ротора электродвигателя, но при этом снижаются требования к развиваемому усилию.
Безредукторный усилитель имеет более простую конструкцию и как следствие обладает высокой надежностью в дополнение к улучшенным динамическим качествам. Скорость реакции усилителя, при смене направления вращения рулевого колеса, а также скорость поворота управляемых колес может значительно превышать величину на редукторном электромеханическом усилителе. Основной проблемой при создании безредукторных усилителей является использование электродвигателей специального исполнения, развивающих значительное усилие (момент) на низких скоростях вращения.
Принцип работы электромеханического усилителя рулевого управления выглядит следующим образом.
Питание усилителя на всех режимах осуществляется от бортовой сети автомобиля по силовым проводам. Ток, потребляемый усилителем в режиме «компенсации», то есть когда электродвигатель создает дополнительное усилие, помогающее водителю, может достигать значительной величины (55 А и выше), в связи с чем на большинстве автомобилей работа ЭМУРа на неработающем двигателе невозможна или ограничена, с целью предотвращения чрезмерного разряда аккумуляторной батареи.
Работой усилителя управляет контроллер. Поворот ключа в замке зажигания активирует контроллер, который в свою очередь запускает операции инициализации и поиска ошибок. Обнаружение на данном этапе каких-либо неисправностей влечет за собой переход усилителя в режим «отказа» и помощь водителю в управлении автомобилем будет отсутствовать. После получения тахометрического сигнала, определяющего устойчивую работу двигателя автомобиля, контроллер переключает усилитель в основной рабочий режим – режим «компенсации».
Врежиме «компенсации» контроллер постоянно получает данные от датчика момента, встроенного в разрез рулевого вала и датчика
25
положения ротора электродвигателя. Обрабатывая эти данные совместно, усилитель получает информацию о величине и направлении прикладываемого водителем усилия. В соответствии с этой информацией контроллер формирует силовой управляющий сигнал, подаваемый в статор электродвигателя.
Зависимость выходного компенсирующего момента от входного управляющего момента обычно задается таким образом, чтобы независимо от типа дорожного покрытия водителю достаточно было прикладывать усилие к рулевому колесу не более определенного комфортного минимума (5 - 7 Н·м).
Как уже отмечалось ранее, с увеличением скорости движения автомобиля снижаются сцепные свойства между колесами и дорожным покрытием, следовательно, необходимо уменьшить величину компенсирующего усилия со стороны усилителя, для создания «тяжелого руля» и обеспечения «чувства дороги». Выполнение этого требования осуществляется за счет получения контроллером данных о скорости движения автомобиля через отдельный вход. С ростом скорости величина компенсирующего момента уменьшается. Зависимость компенсирующего момента от скорости автомобиля не является линейной и в большинстве случаев определяется экспериментально для конкретной марки автомобиля.
Достоинствами электромеханического усилителя являются:
-компактность и простота конструкции;
-высокая надежность;
-небольшой дополнительный расход топлива на привод усилителя (по сравнению с ГУР).
К недостаткам относят: сложности в обслуживании и ремонте, необходимость использования специального оборудования, а также ограниченный диапазон развиваемых компенсирующих моментов (обычно не более 35 Н·м).
Таким образом, можно сделать вывод, что из представленных конструкций усилителей наиболее эффективным является электромеханический безредукторный усилитель.
Основными направлениями научных разработок в области конструирования рулевых управлений являются совершенствование алгоритма работы контроллера и учет большего числа показателей, влияющих на безопасность движения.
26
Усилители рулевого управления серийно стали устанавливаться на автомобили ЗИЛ-130 (ранее ЗИС-125) с 1957 года автозаводом имени И.А. Лихачева [9].
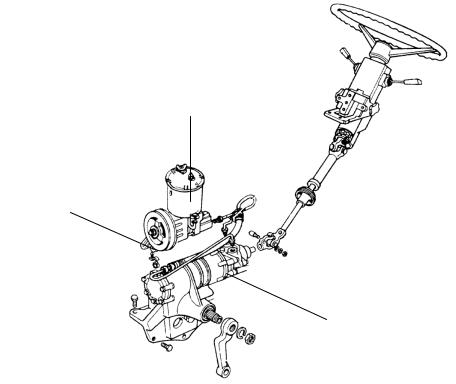
Гидравлический усилитель интегрального типа (рис. 1) представляет собой единый агрегат, в котором объединены вместе рулевой механизм, гидравлический распределитель и силовой цилиндр.
3
2
1
Рис. 1. Общее устройство рулевого управления ЗИЛ-431410: 1 – гидравлический усилитель; 2 – насос усилителя; 3 – бачок
Рулевой механизм типа винт-рейка выполнен в виде винта, шариковой гайки, поршня-рейки и зубчатого сектора. Передаточное число механизма 20,0.
Насос усилителя – лопастной. Приводится в действие от коленчатого вала двигателя клиноременной передачей через шкив, закрепленный на его валу.
Ограничение подачи рабочей жидкости в гидравлический усилитель осуществляется перепускным клапаном, установленным в насосе.
Ограничение максимального давления в системе производится предохранительным клапаном, установленным внутри перепускного
27
клапана насоса. Предохранительный клапан срабатывает при давлении
6,5-7,0 МПа.
Теоретические положения
Усилитель собран в чугунном корпусе рулевого механизма, являющимся одновременно и силовым цилиндром (рис. 2).
Вкорпусе силового цилиндра 2 установлен поршень-рейка 4 с чугунными уплотнительными кольцами 3 и с изготовленной на нем зубчатой рейкой. Поршень-рейка находится в зацеплении с зубчатым сектором 25, выполненным как одно целое с валом рулевой сошки 26. Вал рулевой сошки установлен в корпусе на бронзовых втулках. Зазор
взацеплении регулируется смещением вала сошки при помощи специального винта.
Впоршне с помощью стопорного винта закреплена шариковая гайка 6, которая через шарики 8 связана с винтом 5 рулевого механизма. Крайние канавки в шариковой гайке соединены между собой трубкой 7, при этом шарики перемещаются по замкнутому контуру (рис. 3). Такое соединение винта и гайки на перемещающихся шариках обладает малым трением и повышенной долговечностью. В соединении винта и шариковой гайки применена левая резьба.
На винте рулевого механизма (см. рис. 2) между упорными шариковыми подшипниками 11 и 15 установлен золотник 12, находящийся в корпусе гидравлического распределителя 14. Золотник зажат между подшипниками с помощью гайки 16. Подшипник включает в свой состав два кольца, внутреннее кольцо (размещено ближе к золотнику) большего диаметра, основная функция – ограничивать ход золотника и внешнее кольцо, являющееся упорным.
Винт 5 и закрепленный на нем золотник удерживаются в среднем положении (при отсутствии воздействия со стороны водителя и дороги) с помощью шести пар реактивных плунжеров. Каждая пара реактивных плунжеров 20, 22 разжимается центрирующей пружиной 21. Золотник может перемещаться в осевом направлении на 1,1 мм в каждую сторону, вследствие разности его длины и корпуса распределителя 14. На золотнике 12 имеются три пояска и две канавки, а в корпусе распределителя – три окна в виде кольцевых канавок. Таким образом, в корпусе распределителя образуются две камеры, левая камера соединена каналом с полостью Б, а правая камера с полостью А. Рабочая жидкость – масло, от насоса под давлением
28
поступает к корпусу распределителя по трубопроводу (нагнетающая магистраль) в среднее окно (рис. 4).
29