Материал: 2100
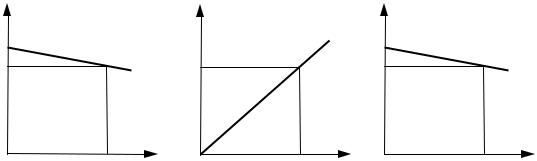
Выражение (7.4) является моментной характеристикой ДПТ,
М = f(IЯ) связывающей электромагнитный момент М двигателя и ве- |
||||||||||||||||||
личину тока якоря IЯ (рис. 7.3, б). |
|
|
|
|
|
|
|
|
|
|
|
|||||||
Выразив из формулы (7.4) ток якоря и подставив его выражение |
||||||||||||||||||
(7.3), получим |
уравнение |
механической |
характеристики |
ДПТ |
||||||||||||||
n = f(М) (рис. 7.3, в) [4, 5, 7]: |
U |
|
|
RЯ М |
|
|
|
|
|
|
|
|||||||
|
|
|
n = |
− |
|
|
. |
|
|
|
|
(7.5) |
||||||
|
|
|
СеΦ |
СеСмΦ2 |
|
|
|
|
||||||||||
Отношен е двух постоянных по ЭДС и моменту Се и См равно |
||||||||||||||||||
2π/60 ≈ 0,105. Тогда |
|
|
|
|
|
|
механической характеристики (7.5) |
|||||||||||
можно зап сать как [4, 5, 7]: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
С |
U |
|
|
|
0,105RЯ |
М Д |
|
|
|
|
|
M |
|
|
||||
|
n = |
Се Φ |
− |
|
|
(Се Φ)2 |
= n0 |
− |
h |
. |
(7.6) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
Первое слагаемое n0 |
является частотой вращения идеального |
|||||||||||||||||
холостого хода, т.е. когда ток в цепи якоря I |
Я |
и электромагнитный |
||||||||||||||||
уравнение |
|
|
|
|
|
|
|
|
|
|
||||||||
момент дв гателя M |
равны нулю, а |
h – жёсткость механической ха- |
||||||||||||||||
рактер ст ки, |
определяющая величину изменения нагрузочного |
|||||||||||||||||
момента при изменении частоты вращения dM/dn. |
|
|
||||||||||||||||
Изменениебчастоты вращения двигателя при переходе от номи- |
||||||||||||||||||
нальной нагрузки к холостому ходу, выраженное в процентах, назы- |
||||||||||||||||||
вают номинальным изменением частоты вращения [4, 5, 7]: |
|
|||||||||||||||||
|
|
|
∆n |
|
|
= n0 − nн 100% . |
|
|
|
|
(7.7) |
|||||||
|
|
|
|
% |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
А |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
nн |
|
|
|
|
|
|
|
|
|
|
Обычно для ДПТ параллельного возбуждения |
n% = 2–8%, по- |
||||||||
этому характеристику частоты вращения двигателя параллельного |
|||||||||
возбуждения называют «жёсткой». |
|
|
|
|
|
||||
Для расчёта частоты вращенияДхолостого хода n0 пользуются |
|||||||||
уравнением (7.3), определив значение |
CeФ при номинальных пара- |
||||||||
метрах напряжения U и тока якоря IЯН [4, 5, 7]: |
|
||||||||
n0 = |
U |
= |
|
|
Unн |
|
. |
(7.8) |
|
СеΦ |
|
|
|
|
|
||||
|
|
U − RЯ I ЯН |
|
||||||
|
|
|
|
|
|
|
И |
||
Для расчёта номинального момента пользуются уравнением [5, 7]: |
|||||||||
М Н = 9550 Р2Н |
[Н·м], |
(7.9) |
|||||||
|
|
nн |
|
|
|
|
|
||
где Р2Н – номинальная мощность на валу двигателя в кВт; nн – номинальная частота вращения якоря в об/мин.
132
n |
а |
M |
б |
n |
в |
n0 |
|
|
n0 |
|
|
|
|
|
|
||
nн |
|
MН |
|
nн |
|
С |
|
|
|
|
0 |
IЯН IЯ |
0 |
IЯН IЯ 0 |
MН M |
Р с.7.3. Характер стики двигателя с параллельным возбуждением: сиеа – скоростная; б – моментная; в – механическая
Из уравнен й (7.3) и ( 7.5) |
следует, что электрическое равнове- |
||
в цепи якоря при лю ом изменении подводимого напряжения U, |
|||
работы |
|
||
падения напряжен я |
RЯIЯ или магнитного потока Φ сохраняется за |
||
счёт изменен я частоты вращения n. Причём связь между механиче- |
|||
скими воздейств ями |
электромагнитными процессами в цепи якоря, |
||
обеспеч вающ ми устойчивость |
|
машины, осуществляется по- |
|
А |
|||
средством противоЭДС якоря Е. Если, например, механическая на- |
|||
грузка на валу увеличилась, то частота вращения будет уменьшаться. Это вызовет, согласно формуле (7.1), уменьшение Э С Е, что приведёт при неизменном значении подводимого напряжения U, согласно
формуле (7.2), к увеличению величины тока якоря I и, следователь-
но, по формуле (7.4), электромагнитного момента двигателя . Изме-
нение частоты вращения будет продолжаться до тех пор, пока электромагнитный момент двигателя не уравновесит механический момент нагрузки на валу. Это явление называют саморегулирование вращающего момента ДПТ [4, 5, 7].
ДЯ M
КПД ДПТ представляет собой отношение отдаваемой (полезной) мощности Р2 к подводимой (потребляемой) Р1. Причем электрическая мощность для ДПТ является активной и в общем случае определяется произведением величин подводимого напряжения U и по-
требляемого тока I [4, 5, 7]: |
И(7.10) |
P =UI , |
а механическая мощность на валу машины в общем случае определяется произведением величин вращающего момента на валу M и угловой скорости вращения вала машины ω [4, 5, 7]:
P = Mω = |
M 2πn . |
(7.11) |
|
60 |
|
133 |
|
|