Материал: 2044
Спецификация |
|
|
|
|
Таблица 2.3 |
|||
|
|
|
|
|
|
|
|
|
|
технических средств с стемы автоматизации (пример для участка “Насос – технологический аппарат”) |
|||||||
Функциона |
Функции |
|
Поз. обозначен е |
|
Наименование и тип элемента. Технические данные |
Место установки |
||
льный узел |
узла |
|
элемента |
|
|
|
|
элемента |
HS |
Дистанцион |
ПрограммируемыйПИД-регулирования. Встроенные интерфейсы Ethernet, RS- |
Пульт оператора |
|||||
1-1 |
Промышленный компьютер PPC-153 (ф. Advantech, Тайвань). |
|||||||
1 |
ное |
|
|
Предназначен для построения интерфейсов “Человек-машина”. |
|
|||
|
управление |
|
|
Процессор Intel Pentium III. Коммуникационные порты RS- |
|
|||
|
и |
|
|
232/485, контроллер Ethernet. Стальной каркас. Температура |
|
|||
|
сигнализаци |
|
среды 0-60 oC, влажность до 95 %. ЖК-дисплей |
|
||||
|
я состояния |
|
б |
|
Шкаф управления |
|||
|
|
1-2 |
|
|
контроллер ОВЕН GKR150. Предназначен |
|||
|
насоса |
|
|
для о |
отки |
мена информацией, логического уравнения, |
|
|
|
|
|
|
232/485, USB. 6(4) дискретных и 4(2) аналоговых входов |
|
|||
|
|
|
|
(выходов). Температура от 10 oC до 70 oC, влажность до 85 % |
|
|||
|
|
|
1-3 |
мА |
По месту |
|||
|
|
|
Пускатель магнитный ПМ-12: ~ 380 В, температура среды от +1 |
|||||
|
|
|
|
до +60 oC |
|
|
По месту |
|
PIRCSA |
Измерение, |
|
2-1 |
Прео разователь избыточного давления ПД 100-ДИ: |
||||
2 |
индикация, |
|
|
измеряемое давление до 0,1 МПа, погрешность измерения 1 %, |
|
|||
|
регистрация |
|
выходной сигнал 4…20 , диапазон температуры среды - |
|
||||
|
, |
|
|
40…80 oC, степень защиты IP 65 |
|
|
||
|
регулирован |
|
|
|
Д |
По месту |
||
|
2-2 |
Пускатель бесконтактный реверсивный ПБР3: номинальное |
||||||
|
ие, зашита и |
|
напряжение 380 В, ток 3 , напряжение питания цепей |
|
||||
|
сигнализаци |
|
управления 24 В |
|
|
|
||
|
я давления в |
2-3 |
Механизм электрический однообратный МЭО-630/25: 380 В, |
По месту |
||||
|
технологиче |
|
токовый датчик положения |
|
|
|||
|
ском |
|
2-4 |
|
|
|
И |
По месту |
|
|
Сирена СИ-1. Предназначена для звуковой аварийной |
||||||
|
аппарате |
|
|
сигнализации. Напряжение +24 В |
|
|||
|
|
|
2-5 |
Реле электромагнитное HE-4; ~ 220 В |
Шкаф управления |
|||
|
|
|
2-6 |
Клапан ПР-Э 3,25 с электромагнитным приводом. Входной |
По месту |
|||
|
|
|
|
сигнал ~ 220 В. Условная пропускная способность 0,2 м3/r, |
|
|||
|
|
|
|
диаметр 3 мм, давление 1МПа |
|
- |
||
|
|
|
1-2 |
Контроллер ОВЕН ПЛК 150 |
|
|||
|
|
|
1-1 |
Компьютер PPC-153 |
|
- |
||
11
3. ИССЛЕДОВАНИЕ КОНТУРА УПРАВЛЕНИЯ
Задание.
Построить кривую разгона объекта и определить графическим и
|
расчетным путем постоянную времени Т, время запаздывания τ, время |
|||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
регулирования tр. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Исходные данные для построения кривой разгона |
Таблица 3.1 |
||||||||||||
|
|
|
|
|
Время от момента изменения входной величины, мин |
|
|
|
|
|||||||||
|
|
Вари |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
ант |
- |
0 |
5 |
10 |
15 |
20 |
25 |
30 |
|
40 |
50 |
60 |
70 |
|
80 |
90 |
|
|
|
|
|
|
|
|
Температура, С0 |
|
|
|
|
|
|
|
||||
|
1 |
|
70 |
72 |
74 |
75,7 |
77 |
77,7 |
78,5 |
|
79,3 |
79,7 |
79,9 |
80 |
80 |
80 |
|
|
|
2 |
|
80 |
84 |
88 |
91,4 |
94 |
95,4 |
97 |
|
98,6 |
99,4 |
99,8 |
100 |
100 |
100 |
|
|
|
3 |
|
30 |
31 |
38,5 |
48 |
55 |
60,5 |
65 |
|
70,5 |
74 |
77 |
78,5 |
80 |
80 |
|
|
4 |
|
20 |
б |
55 |
60,5 |
64 |
67 |
68,5 |
70 |
|
||||||||
|
20,5 |
21,5 |
24 |
30 |
38 |
45 |
|
|
||||||||||
|
5 |
|
30 |
33 |
46 |
59 |
67,5 |
74 |
77 |
|
79,5 |
80 |
80 |
80 |
80 |
80 |
|
|
|
6 |
|
40 |
41 |
43 |
48 |
57 |
69 |
77,5 |
|
85,5 |
88,5 |
89,5 |
90 |
90 |
90 |
|
|
|
7 |
|
50 |
51 |
54 |
60 |
70 |
79 |
86 |
|
93 |
96,5 |
98,5 |
99,5 |
100 |
100 |
|
|
|
8 |
|
20 |
20,5 |
21 |
21,5 |
22,5 |
25 |
30 |
|
49 |
60 |
64,5 |
67,5 |
69,5 |
70 |
|
|
|
9 |
|
20 |
22,5 |
34 |
43,5 |
50 |
55 |
59 |
|
63,5 |
66,5 |
68 |
68,5 |
69 |
70 |
|
|
|
10 |
|
50 |
60 |
68 |
76 |
82 |
86,5 |
89,5 |
|
94 |
97 |
98 |
99 |
100 |
100 |
|
|
|
11 |
|
50 |
58,5 |
67,5 |
75 |
81 |
85 |
88,5 |
|
92,5 |
95,5 |
97,5 |
99 |
100 |
100 |
|
|
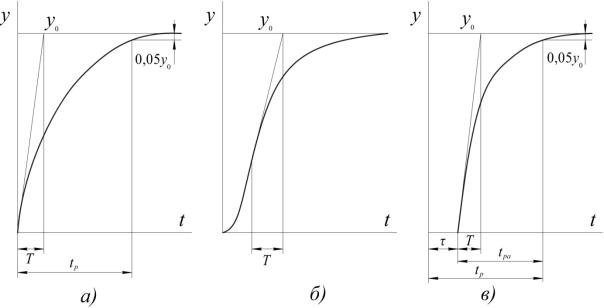
Кривой разгонаАо ъекта называется кривая изменения во времени регулируемой величины в переходном процессе, вызванном мгновенным скачкообразным изменением входной величины. Кривая строится как отклонение от предыдущего установившегося значения. По кривой разгона, полученной экспериментально, определяются все основные параметры, характеризующие динамические свойства
Время запаздывания τ показывает, наИкакое время отстает изменение выходной величины от изменения входной. Чаще всего имеют дело с передаточным запаздыванием, когда начальным изменением регулируемой величины можно пренебречь.
объекта (рис. 3,а). |
Д |
|
|
Постоянная времени Т – условное время изменения |
|
регулируемой величины, если бы изменение происходило с постоянной и максимальной для этого переходного процесса скоростью.
Время переходного процесса (время регулирования) tр на практике принимают равным времени, при котором регулируемая величина у достигает 0,95 от установившегося значения у0.
12
С |
|
|
|
|
|
|
и |
|
|
|
|
|
|
в этом случаебудет: |
|
|
|
|
||
|
Р с. 3.1. Кривые разгона объекта |
|
||||
Исходные данные та л. 3.1 содержат два варианта кривой |
||||||
разгона. В случае кр вой рис. 3. |
1, τ = 0. |
Остальные параметры |
||||
указаны на рисунке. |
Аналитическое |
|
||||
|
выражение переходного процесса |
|||||
|
|
|
t |
|
|
|
|
y(t) y0 |
|
T |
|
|
(3.1) |
|
1 e |
. |
|
|||
|
Д |
|
||||
|
|
|
|
|
|
|
Отсюда определяем постоянную времени для значений у и t в 3…5 любых точках. Затем определяем среднее значение постоянной времени, которое считаем постоянной времени объекта.
Время переходного процесса tр определяется из выражения (3.1) путем подстановки у = 0,95 у0 и полученного Ииз расчетов Т.
Графически постоянная времени определяется на графике кривой разгона как отрезок времени от момента пересечения касательной, проведенной в точке перегиба (имеющую максимальную скорость) с линией начального установившегося значения (ось времени), до момента ее пересечения с линией нового установившегося значения (см. рис. 3.1 а,б).
В случае кривой, указанной на рис. 3.1 б, объект представляют в виде двух звеньев: звена чистого запаздывания и последовательно подключенного инерционного звена (рис. 3.1 в).
13
Аналитическое выражение для рис. 3.1,в:
|
|
|
t |
|
|
|
|
|
|
|
|||
|
e |
|
T |
|
, |
(3.2) |
y(t) y0 1 |
|
|
||||
|
|
|
|
|
|
|
при t≤τ у ≈ 0, т.е. начальными изменениями пренебрегаем. Постоянная времени определяется таким же образом, взяв точки
при ti > tn, где tn определяется либо при построении кривой разгона (за точкой перег ба), л бо принимается tn = 0,25tk, где tk – конечное время переходного процесса, при котором yi =y0 = const.
|
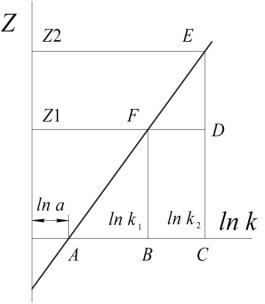
Начальный участок кривой (см. рис. 3.1,в) предлагается |
|||||||
аппрокс м ровать |
|
|
|
|
|
|
||
С k aebZ , |
|
(3.3) |
||||||
где Z = y; k = t. |
|
|
|
|
|
|
||
|
Прологар фм ровав (3.3), получим: |
|
|
|||||
|
ln k ln a bZ , |
|
|
|||||
выражениемотсюда |
ln k ln a |
|
|
|
||||
|
Z |
|
. |
(3.4) |
||||
|
|
b |
||||||
|
|
|
|
|
|
|||
|
Геометрическая интерпретация уравнения (3.4) – прямая (рис. |
|||||||
3.2). |
б |
|
|
|||||
А |
|
|||||||
|
|
|||||||
|
|
Д |
|
|||||
|
|
|
|
|
|
|
И |
|
|
Рис. 3.2. Аппроксимация кривой разгона |
|
||||||
|
Из подобия треугольников |
ABF и |
FDE имеем |
|
||||
|
|
DE |
|
BF |
, |
|
|
|
|
|
DF |
|
|
|
|||
|
|
|
BA |
|
|
|||
14
отсюда
|
|
|
Z 2 Z1 |
|
ln k2 ln k1 |
. |
|
||||
|
|
|
Z1 |
|
|
|
|
ln k ln a |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||
Обозначим ln k = F; ln a = A. Тогда |
|
||||||||||
С |
|
A F1 |
Z1(F2 F1) |
. |
(3.5) |
||||||
|
|
||||||||||
|
|
|
|
|
|
Z 2 Z1 |
|
||||
Таким образом, для нахождения τ нужно взять две любые точки |
|||||||||||
кривой разгона при ti > tn и подставить в выражение (3.5): |
|
||||||||||
рования |
exp A . |
|
|||||||||
Время переходного процесса в этом случае определяется так же |
|||||||||||
и увел |
ч вается на вел |
чину τ: |
t pa , |
|
|||||||
|
|
|
|
t p |
|
||||||
где tpa |
– время регул |
|
|
апериодического звена. |
|
||||||
|
б |
|
|||||||||
|
А |
|
|||||||||
|
|
|
|
|
|
Д |
|
||||
|
|
|
|
|
|
|
|
|
|
И |
|
15