Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
ее таким образом, что контакты ЗК замыкаются, а РК размыкаются. В некоторых конструкциях реле якорь при выключении тока под действием собственного веса возвращается в исходное положение.
Таким образом, электромагнитное реле состоит из трех основных частей:
контактной системы (контактные пружины выполнены из материала нейзильбера);
магнитопровода (ярмо, сердечник, якорь, выполненные из мягкой стали);
обмотки (катушки).
Магнитную цепь составляют сердечник, якорь, ярмо и воздушный зазор между якорем и сердечником.
При детальном рассмотрении работы реле в процессе срабатывания и отпускания наблюдаются четыре этапа.
Этап 1 — срабатывание реле. Длительность этого этапа — время полного срабатывания tcp, т, е. от момента подачи напряжения на катушку реле до момента надежного замыкания контактов; Imр — величина тока, при котором начинается движение якоря; tmp — время, за которое ток достигает это значение, т. е. промежуток, соответствующий началу движения якоря; Iср — ток, при котором срабатывает реле; tдв — время движения якоря при срабатывании. Таким образом, время полного срабатывания, отвечающее окончанию движения якоря:
|
= |
+ . |
(7.1) |
|
|
дв |
|
Этап 2 — работа реле (tраб –— время работы реле). После того как реле сработает, ток в обмотке продолжит увеличиваться, пока не достигнет установившегося значения. Впоследствии величина тока в обмотке реле остается неизменной. Отношение установившегося тока Iуст к величине тока срабатывания Iср называется коэффициентом запаса реле по срабатыванию Кзап (т. е. Кзап показывает надежность работы реле).
К = |
уст |
= 1,5 ÷ 2. |
(7.2) |
зап ср
Этап 3 — отпускание реле. Этот период начинается от момента прекращения подачи сигнала до момента, когда ток в обмотке реле уменьшится до значения Iоm. Отношение тока отпускания к току срабатывания называется коэффициентом возврата.
|
|
|
|
К = |
|
. |
(7.3) |
|
|||
в |
ср |
|
|
|
|
||
Обычно Кв = 0,4–0,8.
Этап 4 — покой реле. Это отрезок времени от момента размыкания контактов реле до момента поступления нового сигнала на обмотку реле. При быстром следовании управляющего сигнала друг за другом работа реле характеризуется максимальной частотой срабатывания (количество срабатываний реле в единицу времени).
7.1.2. Электромагнитные реле постоянного тока (поляризованные)
В отличие от рассмотренных ранее нейтральных электромагнитных реле у поляризованного реле направление электромагнитного усилия зависит от полярности сигнала постоянного тока в обмотке. Поляризация таких реле осуществляется при помощи постоянного магнита.
Существует много конструктивных разновидностей поляризованных реле, которые классифицируются по ряду признаков. По конструктивной схеме магнитной цепи различают реле с последовательной, параллельной (дифференциальной) и мостовой магнитными цепями, по числу обмоток управления — одно- и многообмоточные, по способу настройки контактов (по числу устойчивых положений якоря) различают двух- и трехпозиционные.
Поляризованные реле получили большое распространение в маломощной автоматике, особенно в следящих системах при управлении реверсивными двигателями.
Кчислу достоинств поляризованных реле относятся:
высокая чувствительность, которая характеризуется мощностью срабатывания и составляет 10–5 Вт;
большой коэффициент управления;
малое время срабатывания (единицы миллисекунд).
Кнедостаткам по сравнению с нейтральными электромагнитными реле относятся:
сложность конструкции;
большие габариты, вес и стоимость.
В поляризованных реле, как было отмечено, используют дифференциальные и мостовые схемы магнитных цепей, которые имеют много разновидностей (название цепей связано с типом электрической схемы замещения электромагнитной системы). На рисунке 7.3, а изображено поляризованное реле с дифференциальной схемой магнитной цепи.
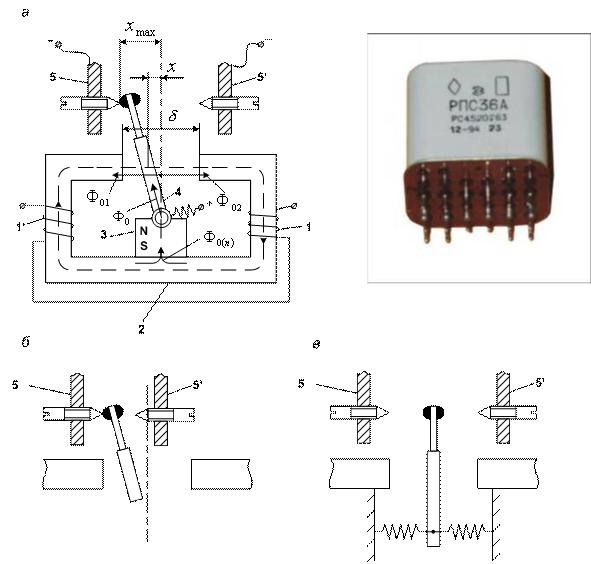
Рис. 7.3 — Поляризованное реле (а) и способы настройки контактов (б, в): 1, 1’ — намагничивающие катушки; 2 — ярмо; 3 — постоянный магнит; 4 — якорь; 5, 5’ — контакты
На якорь реле действуют два не зависимых друг от друга потока: поток Фо(п) постоянного магнита, не зависящий от рабочего состояния схемы, в которую включено реле, и рабочий (управляющий) поток Фэ(р), определяемый намагничивающей силой катушки, т. е. величиной протекающего по обмотке тока. Электромагнитное усилие, действующее на якорь, определяется, таким образом, в зависимости от суммарного действия обоих потоков — Фэ(р) и Фо(п). Изменение направления электромагнитного усилия при изменении полярности тока в рабочей обмотке происходит вследствие того, что изменяется направление рабочего потока относительно поляризующего Фо(п).
Поляризующий поток Фо(п) проходит по якорю и разветвляется на две части — Ф01 и Ф02 — в соответствии с проводимостями воз-

душных зазоров слева и справа от якоря (δл и δпр). В зависимости от полярности управляющего сигнала рабочий поток Фэ(р) вычитается из потока Ф01 в зазоре слева от якоря и прибавляется к потоку Ф02 справа от якоря (как показано на рис. 7.3, а), или наоборот.
В данном случае якорь перекинется из левого положения в правое. При выключении сигнала якорь будет находиться в том положении, которое он занимал до выключения сигнала. Таким образом, результирующее электромагнитное усилие, действующее на якорь, будет направлено в сторону того зазора, где магнитные потоки суммируются.
Если теперь в обмотке 1 и 1' (рис. 7.3, а) подать управляющий
сигнал Iср такой величины, чтобы Фэ = ∆Ф (∆ Ф1−2Ф2 = Ф0( ) ), то при незначительном возрастании тока якорь перебросится в правое положение, так как, очевидно, правое усилие будет больше левого.
Магнитные потоки до момента переброски якоря будут соответственно равны:
Ф = ( |
Ф0( ) |
) + ∆Ф − Ф и Ф |
= ( |
Ф0( ) |
) − ∆Ф + Ф . (7.4) |
|
|
|
|
||
л |
2 |
э |
пр |
2 |
э |
|
|
|
|
После переброски якоря в правое положение знаки ∆Ф в указанных выражениях изменятся: если Фэ = ∆Ф, то получим выражения для потоков при правом положении якоря:
Ф = ( |
Ф0( ) |
) − 2∆Ф и Ф = ( |
Ф0( ) |
) + 2∆Ф. |
(7.5) |
|
|
|
|
||
л |
2 |
пр |
2 |
|
|
|
|
|
|
После перехода якоря за нейтральную линию перераспределяющийся поток Ф0(п) создает дополнительное усилие, необходимое для перемещения якоря. Этим и объясняется, что поляризованные реле имеют незначительное время срабатывания, не превышающее нескольких миллисекунд. Кроме того, дополнительное усилие, сжимая контакты, позволяет при очень малой величине управляющего сигнала управлять относительно мощными электрическими цепями, т. е. коэффициент управления имеет значительную величину (до 5000), чего не достигает ни одно нейтральное реле.
Обычно отклонение якоря от нейтрали составляет 0,05–0,1 мм. В поляризованном реле с мостовой схемой магнитной цепи
(рис. 7.4) силы притяжения якоря, включенного в одну из диагоналей мостовой схемы, действуют так же, как и в дифференциальной схеме, т. е. в воздушном зазоре с одной стороны якоря рабочий поток Фэ(р)
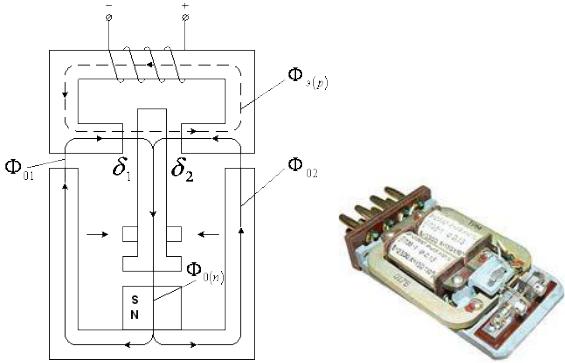
направлен согласно с поляризующим потоком Ф0(п), а с другой — встречно. Мостовые схемы поляризованных реле имеют более высокую стабильность параметров и устойчивость к внешним механическим воздействиям.
Рис. 7.4 — Поляризованное реле с мостовой схемой магнитной цепи
Поляризованные реле выпускаются трех видов настройки. Реле, изображенное на рисунке 7.3, а, является двухпозиционным. Если неподвижные контакты 5 и 5' симметрично расположены относительно нейтральной линии (якорь отрегулирован симметрично), то при выключении управляющего сигнала якорь реле остается в том же положении, которое он занимал при наличии управляющего сигнала. Повторное включение управляющего сигнала прежней полярности не вызовет изменения положения якоря. Если изменить полярность управляющего сигнала, то якорь перебросится в другое положение, например в положение 5', и останется в нем после снятия сигнала. Такая настройка называется нейтральной, или двухпозиционной.
Если один из контактных винтов, 5 или 5', выдвинут за нейтральную линию (рис. 7.3, б), то реле является двухпозиционным с преобладанием к одному из контактов. При выключенном реле якорь всегда прижат к левому контакту 5 (или к правому контакту 5', если за нейтральную линию выдвинут левый контакт) и перебрасыва-