Материал: 2015 [Тынчеров] Основы автоматизации ТПНП
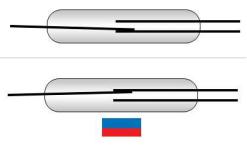
Рис. 7.10 — Схема геркона на переключение
В таком герконе не два, а три контакта: два остаются неподвижными, а третий переключается между двумя другими. Без магнитного поля замыкается одна цепь, а при воздействии магнита происходит переключение на другой контакт. Нормально замкнутый контакт (тот, на который переключается геркон без магнитного поля) выполняется из немагнитного материала, а два других — из магнитного.
Самыми распространенными являются герконы, работающие на замыкание.
Магнитоуправляемые герметичные контакты можно использовать во влажных и запыленных условиях, они быстро срабатывают и надежно работают при самых разных температурах.
Преимущества:
Практически отсутствие дребезга контактов. Контакты геркона находятся в вакууме или в инертном газе и слабо обгорают, даже если при замыкании или размыкании между контактами возникает искра.
Долговечность герконов. Считается, что если не бить геркон и не пропускать очень большие токи, то срок службы геркона бесконе-
чен (хотя в технических данных на герконы указаны ограничения, 103—108 и больше срабатываний).
Меньший размер по сравнению с классическим реле, рассчитанным на такой же ток.
Отсутствие необходимости применения тугоплавких и драгоценных металлов для контактов.
Герконы почти бесшумны.
Высокое (относительно классических реле) быстродействие.
Удобство применения.
Недостатки:
Больший вес по сравнению с открытыми контактами.
Необходимость создания магнитного поля.
Восприимчивость к внешним магнитным полям, необходимость защиты от них.
Сложность монтажа.
Хрупкость — герконы нельзя использовать в условиях сильных вибраций и ударных нагрузок.
Ограниченная скорость срабатывания.
Возможность самопроизвольного размыкания контактов геркона при больших токах.
Иногда контакты «залипают» (остаются в замкнутом состоянии) — такой геркон подлежит замене.
Применение герконов. Герконы широко применяются в различных датчиках, цель которых фиксировать какое-то положение предметов: открывание и закрывание дверей, крышки ноутбука и т. п. В частности, герконы используются в поплавковых датчиках уровня жидкости в резервуарах [19].
Глава 8. ПЕРЕДАЧА ИНФОРМАЦИИ
ВСИСТЕМАХ АВТОМАТИЗАЦИИ
8.1.Основные сведения о системах телемеханики
Телемеханика — область науки и техники, предметом которой является разработка методов и технических средств передачи и приема информации (сигналов) с целью управления и контроля на рас-
стоянии.
Специфическими особенностями телемеханики являются:
1)удаленность объектов контроля и управления;
2)необходимость высокой точности передачи измеряемых ве-
личин;
3)недопустимость большого запаздывания сигналов;
4)высокая надежность передачи команд управления;
5)высокая степень автоматизации процессов сбора информации. Телемеханизация применяется тогда, когда необходимо объеди-
нить разобщенные или территориально рассредоточенные объекты управления в единый производственный комплекс (например, при управлении газо- и нефтепроводом) либо когда присутствие человека на объекте управления нежелательно (например, в атомной промышленности, на химических предприятиях) или невозможно (например, при управлении непилотируемой ракетой).
Особое значение телемеханика приобретает в связи с созданием автоматизированных систем управления (АСУ). Обработка данных, полученных по каналам телемеханики, на ЭВМ позволяет значительно улучшить контроль за технологическим процессом и упростить управление.
Поэтому в настоящее время понятия «телемеханика» и АСУ ТП становятся синонимами. Разница между этими понятиями заключается не столько в технической сути, сколько в традициях использования в определенной области промышленности. Например, в трубопроводном транспорте предпочитают использовать слово «телемеханика», на промышленных предприятиях — АСУ ТП.
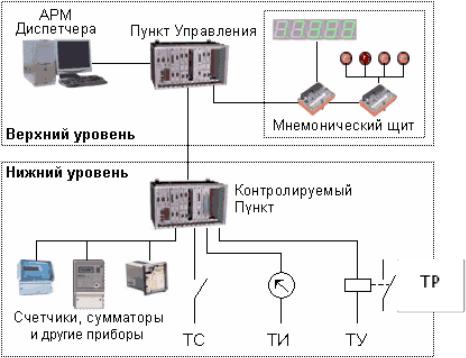
Рис. 8.1 — Двухуровневая схема телемеханики: ТС — телесигнализация; ТИ — телеизмерение; ТУ — телеуправление; ТР — телерегулирование
В англоязычных источниках аналогом понятия «телемеханика» является сокращение SCADA — Supervisory Control And Data Acquisition —диспетчерское управление и сбор данных, в которое вкладывается, по сути, тот же смысл.
Пример построения двухуровневой телемеханической системы, ставшей классической схемой, показан на рисунке 8.1.
Контроль и управление системой осуществляют с пункта управления (ПУ), где находятся диспетчер, аппаратура телемеханики, ЭВМ, мнемонический щит. Объекты контроля и управления находятся на одном или нескольких контролируемых пунктах (КП).
Базовыми функциями системы телемеханики являются телеуправление (ТУ), телеизмерение (ТИ), телесигнализация (ТС) и телерегулирование (TP).
Телеуправление обеспечивает дистанционное управление объектом контроля. ТУ представляет собой воздействие на исполнительные органы контролируемых пунктов, имеющие дискретное состояние, путем подачи также дискретных команд. Команды ТУ обычно двухпозиционные: включить — отключить.
Телесигнализация используется для дистанционного контроля дискретных изменений состояния объекта, например, включен/вы-
ключен, открыт/закрыт, норма/авария и т. п. Для получения данных объект оснащают датчиками состояния. В простейшем случае применяют двухпозиционные контактные переключатели, но могут использоваться и многопозиционные переключатели.
Телеизмерение используется для получения количественных значений непрерывных параметров контролируемого процесса, например температуры, давления и т. п. Для измерения на объекте используют преобразователи, которые преобразуют эти параметры в нормированные электрические сигналы. Контроллер КП измеряет значения этих сигналов и по запросам ПУ или периодически передает их на ПУ в цифровом виде.
Телерегулирование обеспечивает дистанционное задание уровня воздействия на объект управления. Оно представляет собой телеуправление объектами с непрерывным множеством состояний. Для реализации телерегулирования используются функции ТИ — ТУ или ТС — ТУ. Управление начинается с задания оператором величины воздействия, а затем выдачей команды с ЭВМ.
Пункт управления — это место размещения диспетчерского персонала, аппаратуры для приема и обработки информации от контролируемых пунктов. Часто под термином ПУ подразумевают контроллеры, непосредственно выполняющие прием и первичную обработку данных от КП. В задачи ПУ входят:
1)прием данных с КП по каналам связи;
2)организация опроса КП при подключении нескольких КП на один канал связи;
3)передача на КП команд управления;
4)передача данных и прием команд ЭВМ;
5)переадресация, передача данных на верхний уровень и прием команд с верхнего уровня в многоуровневых системах.
Контролируемый пункт — это место размещения объектов контроля и управления, а также аппаратура, выполняющая функции контроля и управления, обычно называемая контроллером КП. Часто под термином КП подразумевают один контроллер, установленный на контролируемом объекте.
На крупных объектах (таких, как нефтеперекачивающие или компрессорные станции) могут находиться несколько контроллеров КП.
Взаимодействие между ПУ и КП происходит по каналу связи.