Материал: 1398
4 
 3
3
2
1




 М
М 



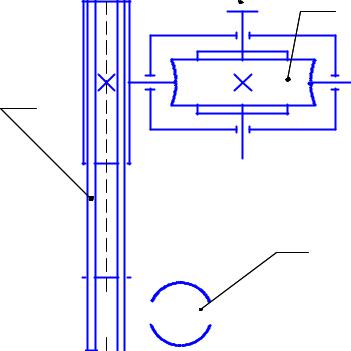
Рис. 3. Кинематическая схема изучаемого привода:
1 – электродвигатель; 2 - клиноременная передача; 3 - червячный редуктор; 4 – муфта
4.ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
4.1.Изучить конструкцию привода.
4.2.Определить передаточное число привода.
Для этого с помощью рукоятки необходимо вращать вал электродвигателя до тех пор, пока выходной вал редуктора с полумуфтой 6 (рис.2) (выходной вал привода) сделает один полный оборот. Зафиксированное при этом число оборотов вала электродвигателя и показывает передаточное число привода , так как
u |
пр |
|
nэ |
, |
(1) |
|
|||||
|
|
n |
|
||
|
|
|
вых |
|
|
где 

 - частота вращения вала электродвигателя; - частота вращения выходного вала привода.
- частота вращения вала электродвигателя; - частота вращения выходного вала привода.
5

Полученное здесь и все последующие значения параметров привода следует занести в таблицу отчета (форма отчета приведена в приложении). Все расчёты вести до двух знаков после запятой.
4.3. Определить передаточное число ременной передачи.
На практике передаточное число клиноременной передачи uрем определяют без учета упругого скольжения, величина которого невелика, по формуле:
uрем |
dp2 |
, |
(2) |
|
dp1 |
||||
|
|
|
где 

 - расчётный (по нейтральной линии) диаметр большого (ведомого) шкива, мм;
- расчётный (по нейтральной линии) диаметр большого (ведомого) шкива, мм;




 - расчётный диаметр малого (ведущего) шкива, мм.
- расчётный диаметр малого (ведущего) шкива, мм.
Поскольку расчетные и наружные диаметры шкивов близки друг к другу, передаточное число ременной передачи можно определить приближенно как отношение наружных диаметров шкивов.
Диаметры шкивов измерить с помощью штангенциркуля.
4.4. Определить передаточное число червячного редуктора .
Известно, что передаточное число привода равно произведению передаточных чисел передач, входящих в привод, т.е.
откуда |
|
|
(3) |
|
uпр |
|
|
||
uред |
. |
(4) |
||
uрем |
||||
|
|
|
4.5. Определить частоту вращения выходного вала привода (а значит и частоту вращения вала исполнительного органа рабочей машины, который через муфту соединяется с выходным валом привода).
Из формулы (1) следует, что:
nвых |
|
nэ |
, |
(5) |
|
||||
|
|
uпр |
|
|
где 

 – частота вращения электродвигателя, об/мин (принять из характеристики двигателя, см. стр. 4).
– частота вращения электродвигателя, об/мин (принять из характеристики двигателя, см. стр. 4).
6

4.6. Определить крутящий момент , который может быть реализован на выходном валу привода.
В разделе 3 (стр.4) указаны основные параметры электродвигателя привода. С учетом этих данных нетрудно определить крутящий момент на валу электродвигателя 

 , в Н∙м по формуле
, в Н∙м по формуле
T 9550 |
Pэ |
, |
(6) |
|
|||
э |
nэ |
|
|
|
|
|
где 

 - мощность электродвигателя, кВт;
- мощность электродвигателя, кВт; 

 - частота вращения электродвигателя, об/мин.
- частота вращения электродвигателя, об/мин.
Величину крутящего момента на выходном валу привода в Н∙м можно определить с учетом передаточного числа привода и потерь энергии в ременной передаче и червячном редукторе по формуле
(7)
где - КПД ременной передачи; - КПД червячного редуктора.
Для расчёта можно принять и .
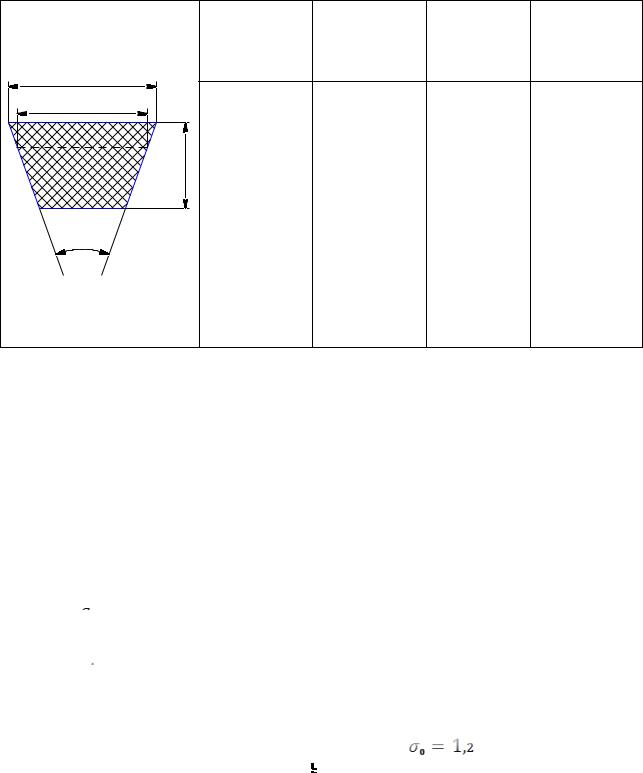
4.7. Определить сечение клинового ремня.
Для этого необходимо посредством штангенциркуля замерить ширину большего основания ремня W и высоту Т сечения ремня, после чего по таблице 1 определить обозначение сечения ремня.
4.8. Отрегулировать натяжение ремня.
Ременная передача передает нагрузку за счет сил трения, которые возникают между ремнем и шкивами за счет предварительного натяжения ремня. Предварительное натяжение выбирается из условия, чтобы ремень мог передавать полезную нагрузку, сохраняя натяжение достаточно длительное время, не получая большой вытяжки, и имел бы удовлетворительную долговечность. Недостаточное натяжение ремня не позволяет реализовать в полной мере нагрузочную способность передачи из-за проскальзывания ремня относительно шкивов, а повышенное натяжение увеличивает нагрузки на элементы передачи (валы, подшипники и т.д.), что снижает их долговечность.
Из вышесказанного очевидно, что необходимо периодически контролировать натяжение ремня. С достаточной для практики
Таблица 1
7
|
Размеры сечений клиновых ремней, мм (по ГОСТ 1284.1-89) |
||||
|
|
Обозначение |
Ширина, W, |
Высота, Т, |
Площадь |
|
|
сечения |
мм |
мм |
поперечного |
|
|
|
|
|
сечения А, |
W |
|
Z |
10 |
6 |
мм2 |
Wp |
|
47 |
|||
|
|
|
|
|
|
|
|
A |
13 |
8 |
81 |
|
T |
B |
17 |
11 |
143 |
|
|
||||
|
|
C |
22 |
14 |
237 |
40±1 |
D |
32 |
19 |
477 |
|
|
|
||||
|
|
E |
38 |
23,5 |
692 |
|
|
O |
50 |
30 |
1172 |
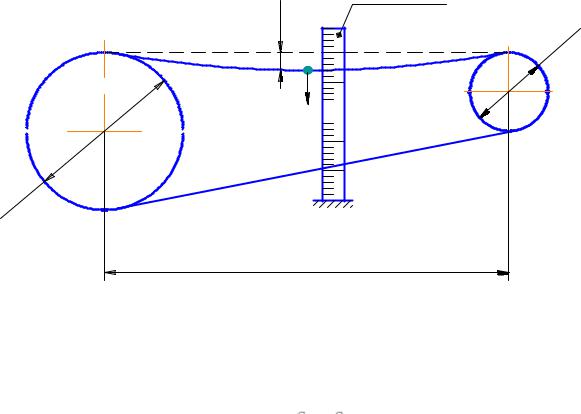
точностью это можно сделать путем подвешивания посредине верхней ветви ремня небольшого груза G и замера стрелы прогиба У (рис 4). Существует зависимость, позволяющая из условия обеспечения требуемого натяжения ремня определить стрелу прогиба У. Для горизонтального положения верхней ветви ремня, что имеет место в лабораторной установке настоящей работы, эта зависимость имеет вид
У |
G a |
(8) |
|
4 A 0 |
|||
|
|
где 
 - вес груза, Н;
- вес груза, Н;

 - межосевое расстояние, мм;
- межосевое расстояние, мм;

 - площадь поперечного сечения ремня, мм2;
- площадь поперечного сечения ремня, мм2; 
 - начальное напряжение в ремне от его предварительного
- начальное напряжение в ремне от его предварительного
натяжения, МПа. |
|
Для клиноременной передачи принимают |
МПа. |
Полученное значение прогиба в мм. |
|
Регулирование натяжения ремня необходимо проводить в следующей последовательности:
8
линейка
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
p |
|
|
|
|
|
|
|||||||||
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У
G 
a
|
1 |
p |
|
d |
|
Рис. 4 Схема измерения прогиба ремня
1)С помощью линейки измерить межосевое расстояние ремен-
ной передачи 
 ;
;
2)По формуле (8) определить расчетное значение прогиба
ремня  при весе груза
при весе груза 




 МПа (2 кг). Площадь поперечного сечения ремня указана в вышеприведенной таблице;
МПа (2 кг). Площадь поперечного сечения ремня указана в вышеприведенной таблице;
3)Если имеется провисание верхней ветви ремня, устранить его перемещением электродвигателя вправо с помощью винтов 5 (см. рис. 2), предварительно ослабив затяжку болтов крепления электродвигателя к раме;
4)Зафиксировать положение верхней ветви ремня по показаниям линейки;
5)Подвесить груз посредине верхней ветви ремня и
зафиксировать после этого положение ветви ремня в точке подвеса груза по показаниям линейки;
6)Определить величину прогиба  как разность показаний линейки до и после подвешивания груза;
как разность показаний линейки до и после подвешивания груза;
7)Если зафиксированный прогиб не соответствует расчетному значению, полученному по формуле 8, необходимо, не убирая груз, перемещением электродвигателя в ту или иную сторону с помощью винтов 5 добиться соответствия действительного прогиба расчетному;
8)Затянуть болты крепления электродвигателя к раме.
9