Материал: Разработка цифровой системы автоматического управления технологической установкой
. Разработка алгоритма работы системы
При разработке алгоритма учтём процесс работы
системы, аварийные режиме работы, особенности вычисления и контроль датчиков.
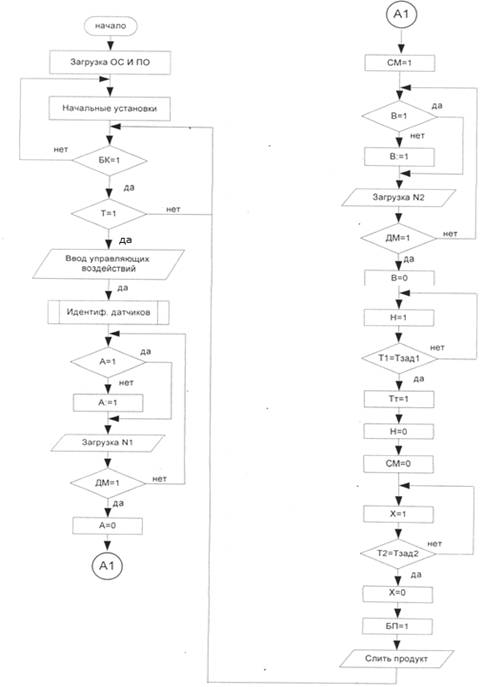
Рис. 6. Алгоритм управления объектом
. Аналитическое исследование
Получив дискретную передаточную функцию объекта и регулятора, проведём аналитическое исследование.
Дискретная передаточная функции объекта управления
Дискретная передаточная функция ПИД-регулятора

Определим дискретную передаточную функцию
замкнутой системы
Если на вход подать системы подать единичный
скачок ![]() ,
получим изображение выходной величины системы
,
получим изображение выходной величины системы
![]()
Перейдя к оригиналу используя формулу
разложения, получим закон изменения выходной величины в дискретные моменты
времени
А(1),В(1) - значения числителя и знаменателя передаточной функции замкнутой системы при z = 1.
А(zi),В(zi) - значения числителя и производной знаменателя передаточной функции замкнутой системы при z=zi.
Подставив все известные и рассчитанные значения
получим на графике значение y[n]
для n=0,1,2…
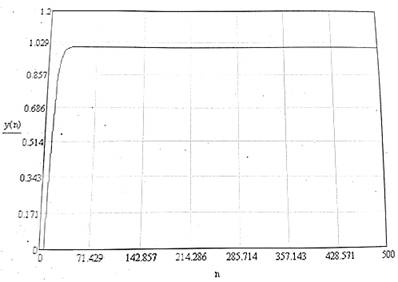
Рисунок 7. График переходных процессов.
. Моделирование системы
Выполним моделирование системы
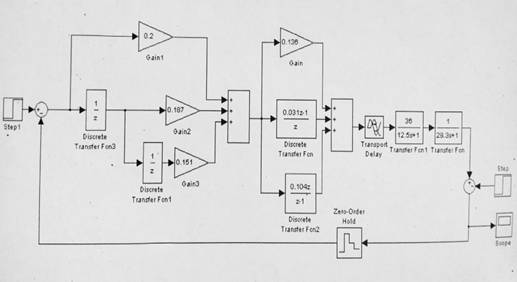
Рис. 8. Модель системы
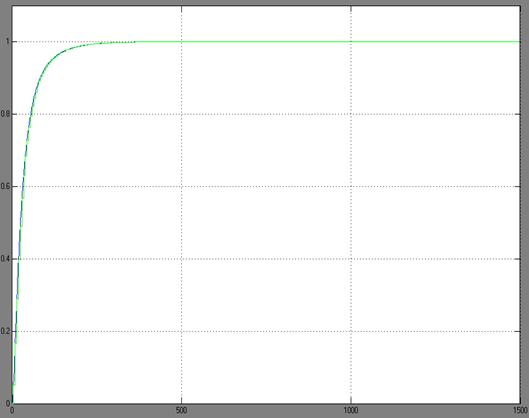
Рис. 9. График переходных процессов при
отсутствии возмущения
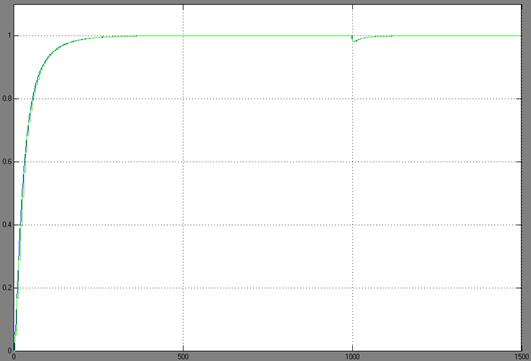
Рис. 10. График переходных процессов при наличии
возмущения
Выводы
реактор дискретный аналоговый сигнал
Объектом для исследования в курсовой работе был
химический реактор. Для данной системы были составлены функциональная и
структурная схемы. В ходе выполнения работы была определена дискретная
передаточная функция, рассчитаны параметры цифрового регулятора, выбрано
оборудования системы с помощью программ MatLab
и MathCAD. В результате
проведённого моделирования были получены графики ОУ и АЦП при наличии и
отсутствии возмущения.
Литература
1. Теория системы автоматического управления. В.А. Бессекерский, Е.П. Попов - 4-е издание, перераб. и доп. - СПб, «Профессия», 2003.-752 с.
. Ципкин Я.З. Теория линейных импульсных систем, ФизматГИЗ, М.:968с.
. Жуков Н.С. Цифровые системы управления и обработки информации. Методическое пособие для самостоятельного изучения.
. Теория автоматического управления: Нелинейные системы управления при случайных воздействиях/ Под ред. А.В. Нетушила. - М.: Высш. школа, 1983.
. Лукас В.А. Теория автоматического управления. - М.: Недра, 1990. - 416 с.
. Брюханов В.Н. и др. Теория автоматического управления. - М.: Высш. школа, 2000 г.
. Острём К., Виттенмарк Б. Системы управления с ЭВМ: Пер. с англ. - М.: Мир, 1978. - 480 с., ил.
. Оппенгейм Э., Шафер Р. Цифровая обработка сигналов/ Пер. с англ./ Под ред. С.Я. Шаца. - М.: Связь, 1979. - 416 с.
. Антонью А. Цифровые фильтры: анализ и проектирование/ Пер. с англ. - М.: Радио и связь, 1983. - 320 с.
. Гольденберг Л.М., Матюшкин Б.Д., Поляк М.Н. Цифровая обработка сигналов: Справочник. - М.: Радио и связь, 1985. - 312 с., ил.