Материал: Проектирование самолетного ответчика система воздушной радиолокации
Проектирование самолетного ответчика система воздушной радиолокации
Содержание
самолетный ответчик радиолокация воздушный
Задание на курсовой проект
Введение
. Система ВРЛ аппаратуры УВД
. Обобщенная структурная схема системы вторичной радиолокации
. Общие сведения о самолетном ответчике
. Расчет технических параметров
. Принцип работы самолетного ответчика
. Принцип действия СО по структурной схеме
. Принцип работы СО по функциональной схеме
. Разработка функциональной схемы передатчика
Заключение
Список литературы
Задание на курсовой проект
Спроектировать самолетный ответчик системы ВРЛ. Разработать функциональную схему передающего устройства, произвести расчет СВЧ генератора.
Введение
В соответствии с принципами обеспечения безопасности полетов воздушные суда (ВС) должны находиться под непрерывном контролем диспетчеров на всех этапах выполняемых полетов. Это значит, что должно быть обеспечено наблюдение за каждым ВС, измерение его координат и установлена двухсторонняя связь между экипажем и диспетчерами. Кроме того, диспетчер должен располагать информацией об опасных метеообразованиях и ограничениях пространства для выполнения полетов. Совокупность распределенных в пространстве ВС, метеообразований, зон, разрешенных или запрещенных для полетов, называется воздушной обстановкой.
Основными источниками информации о воздушной обстановке в системах управления воздушным движением (УВД) являются радиолокаторы: обзорные (ОРЛ), диспетчерские (ДРЛ), посадочные (ПРЛ), обзора летного поля (РЛС ОЛП) и метеорологические (МРЛС).
Особое место среди радиолокаторов и других технических средств УВД занимают системы вторичной радиолокации (радиолокационные системы с активным ответом), которые состоят из наземных запросчиков и самолетных (бортовых) ответчиков. Наземный запросчик излучает запросный сигнал, который принимается и обрабатывается самолетным ответчиком. Ответный сигнал излучается ответчиком на другой несущей частоте и принимается приемником запросчика.
Отметим основные преимущества системы вторичной радиолокации (СВРЛ) перед первичными радиолокаторами:
· Большая дальность действия при небольшом энергетическом потенциале ответчика и ее независимость от эффективной отражающей площади.
· СВРЛ работают, как правило, дециметровом диапазоне волн. Затухание в атмосфере радиоволн этого диапазона мало, поэтому дальность действия системы от состояния атмосферы зависит незначительно.
· Несущие частоты (длины волн) по каналам запроса и ответа выбираются различными, поэтому приемник запросчика не принимает маскирующие помеховые сигналы, отраженные от местных предметов и гидрометеообразований. При этом отпадает необходимость применения устройств селекции движущихся целей (СДЦ). В отличии от РЛС с СДЦ при активном ответе сохраняется возможность слежения за целями, у которых доплеровский сдвиг частоты равен нулю (полет по кругу).
· По каналу ответа с борта ВС в зондированном виде может быть передана в принципе любая дополнительная информация, необходимая для УВД, например: индивидуальный (бортовой или условный) номер самолета, высота полета, измеряемая бортовым барометрическим высотомером более точно, чем наземным радиолокатором, путевая скорость самолета, запас топлива в баках и т.п. в зависимости от режимов работы и кодов запросных сигналов.
Очевидным недостатком СВРЛ является необходимость установки на борту ответчика, параметры которого должны быть жестко согласованны с параметрами наземного запросчика.
Предусматривает два способа стандарта работы СВРЛ: стандарт действующий на территории России (стандарт СЭВ или УВД); стандарт соответствующий нормам международной организации гражданской авиации (стандарт ICAO). Отличаются эти стандарты длительностями запросных и ответных импульсов, кодовыми интервалами запросных импульсов, структурой ответных кодов, характером информации, передоваемой ответчиком по каналу ответа, а также возможно отличие в несущих частотах запроса и ответа. По нормам ICAO в зависимости от кода запроса ответчик передает либо условный двоично-восьмеричный номер, набираемый экипажем на пульте управления по программе полета, либо абсолютную высоту - циклическим кодом Гиллхема. По стандарту УВД в зависимости от кода запроса ответчик передает либо бортовой номер самолета двоично-десятичным кодом, либо так называемую текущую информацию, которая состоит из информации о высоте полета - двоично-десятичным кодом и информация о запасе топлива в баках двоичным кодом, либо вектор путевой скорости - двоично-десятичным кодом, либо только информационный код.
В соответствии с требованиями указанных стандартов СВРЛ предназначены для получения информации о воздушных судах, находящихся в воздушном пространстве, контролируемом службой УВД и должны обеспечивать:
· Определение координат ВС, оборудованные ответчиками;
· Определения местоположения ВС относительно посадочного радиолокатора при наличии в нем вторичного радиолокатора;
· Получение информации о высоте полета, бортовом номере, запасе топлива, об аварийной ситуации, выпуске шасси и о векторе путевой скорости;
· Сопряжение с аппаратурой потребителей информации;
· Выполнения своих функций без нарушения работы другого
оборудования.
1. Система ВРЛ аппаратуры УВД
СВРЛ аппаратуры УВД предназначены для повышения эффективности регулирования воздушного движения на трассах и в районах расположения аэродромов.
Они решают следующие задачи:
привод самолетов в район аэродрома посадки;
управление движением самолетов в районе аэродрома;
заход на посадку;
обеспечение самой посадки.
СВРЛ аппаратуры УВД включают самолетные ответчики (СО), расположенные на
борту ЛА, и наземные вторичные радиолокаторы (ВРЛ) в комплексе с аппаратурой
отображения информации (см. рис.1.1).
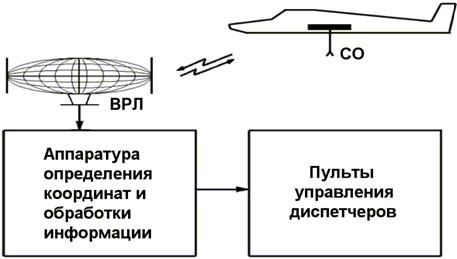
Рис. 1.1 Состав СВРЛ аппаратуры УВД
ВРЛ осуществляет кодированный запрос ответчиков самолетов, находящихся в зоне его действия. СО излучают ответные сигналы, так называемые “кодовые посылки”, которые принимаются ВРЛ и транслируются на командный диспетчерский пункт (КДП). Аппаратура КДП обеспечивает возможность определения координат самолетов (дальность, азимут), а также получения и отображения дополнительной информации (бортовой номер, высота, остаток топлива и др.) непосредственно на рабочих пультах диспетчеров УВД.
В зависимости от режима работы, выбранного на пульте управления СО, он может взаимодействовать со следующими типами наземных ВРЛ:
обзорными радиолокаторами (ОРЛ) (в режиме П-35);
диспетчерскими радиолокаторами (ДРЛ) (в режимах «РСП» и «УВД»);
посадочными радиолокаторами (ПРЛ) (в режимах «РСП» и «УВД»).
ОРЛ решает задачу дальнего обнаружения самолетов и привода их в зону действия ДРЛ. Дальность действия ОРЛ не менее 300 км (пример ОРЛ: изделие П-35).
ДРЛ предназначены для контроля за положением самолетов на расстоянии до 150 км от аэродрома, их опознавания и вывода самолетов в зону действия ПРЛ. Оператор ДРЛ (диспетчер) определяет очередность посадки, передает на борт самолета информацию, необходимую для вывода самолета в плоскость посадочного курса (пример ДРЛ: изделия “Корень ”).
Оператор ПРЛ, наблюдая за отметкой самолета на индикаторе, определяет его отклонение от линии планирования в плоскостях курса и глиссады, а также расстояние до точки оптимального приземления и по каналу радиосвязи передает на борт команды для исправления траектории снижения самолета (пример ПРЛ: изделия РСП-6).
Диаграмма направленности (ДН) остронаправленных антенн ВРЛ в горизонтальной плоскости имеет боковые лепестки. Причем мощность их излучения достаточна для запроса ответчиков, находящихся на значительных расстояниях от ВРЛ. Поэтому наличие боковых лепестков у ДН антенн может привести к появлению на экранах индикаторов ВРЛ добавочных отметок под ложными азимутами, а также паразитной загрузке бортовых ответчиков. Для того чтобы избежать этого в СО осуществляется подавление запросов от боковых лепестков ДН антенн ДРЛ и ПРЛ.
Подавление запроса от боковых лепестков ДН антенн ДРЛ осуществляется путем использования, так называемой, “трехимпульсной системы”, суть которой заключается в следующем (см. рис.1.2). К двум импульсам запросного кода Р1 и Р3 (см. рис.1.2.а), излучаемым направленной антенной ДРЛ, добавляется третий импульс Р2 (импульс подавления), излучаемый отдельной ненаправленной антенной (ДН направленной и ненаправленной антенн приведены на рис.1.2.б). Импульс подавления Р2 во времени отстает на 2 мкс от импульса Р1 запроса.
Энергетический уровень излучения антенны подавления подбирается таким образом, чтобы в местах приема амплитуда импульса подавления была заведомо больше амплитуды импульсов, излучаемых боковыми лепестками ДН и меньше амплитуды импульсов, излучаемых главным лепестком.
В СО после детектирования происходит сравнение амплитуд импульсов кода
запроса (Р1, Р3) и импульса подавления (Р2). Ответ производится только тогда,
когда амплитуда импульсов Р1, Р3 больше амплитуды импульса Р2 на 9 и более
децибел.
 ) б)
) б)
Рис. 1.2 «Трехимпульсная система» подавления запроса от боковых лепестков
ДН антенн ВРЛ: а - структура запросного сигнала ДРЛ; б - ДН направленной и
ненаправленной антенн ДРЛ
Для обеспечения подавления запроса от боковых лепестков ДН антенн ДРЛ должен иметь либо два отдельных передатчика (запроса и подавления), либо один общий передатчик и СВЧ переключатель антенн.
Подавление запроса от боковых лепестков ДН антенн ПРЛ производится методом плавающего порога, суть которого заключается в следующем (см. рис.1.3). В СО с помощью инерционной следящей системы в виде напряжения запоминается амплитуда сигналов, принятых от основного лепестка ДН. Часть этого напряжения, соответствующая заданному уровню, превышающему амплитуду сигналов боковых лепестков (см. рис.1.3.а), устанавливается в качестве порога. В следующее облучение ответ производится только при превышении этого порога запросными сигналами (см. рис.1.3.б). Порог корректируется в последующие облучения.
Однако, энергетические уровни запросных сигналов курса и глиссады ПРЛ
различны, т.к. курс и глиссада задаются разными антеннами. В связи с этим в ПРЛ
для режима работы СО «УВД» введено раздельное кодирование
запросов по курсу и глиссаде, а СО имеет соответственно 2 канала подавления
запроса боковых лепестков ДН антенн ПРЛ. При этом запрос по курсу (код запроса
двухимпульсный, а интервал между импульсами 3,0 мкс) обрабатывается одним
приемным каналом СО, а запрос по глиссаде (интервал между импульсами 5,4 мкс) -
другим.
Рис. 1.3 Принцип подавление запроса от боковых лепестков ДН антенн ПРЛ
пороговым методом: а - временная эпюра запросного сигнала; б - временная эпюра
ответного сигнала
Для обеспечения нормальной работы ответчика при наличии на аэродроме двух
ПРЛ с пересекающимися ДН (такая ситуация имеет место на аэродромах, оснащенных
несколькими взлетно-посадочными полосами (ВПП)) ПРЛ имеют возможность
кодирования запросов по курсу и глиссаде одинаковым кодом для режима
работы СО «РСП». При этом один ПРЛ работает в режиме РСП-1
(интервал между импульсами 3,0 мкс), второй - в режиме РСП-2 (интервал между
импульсами 5,4 мкс), а запросы первого и второго ПРЛ обрабатываются разными
приемными каналами СО.
2. Обобщенная структурная схема системы вторичной радиолокации
Рис. 2.1 Обобщенная структурная схема ВРЛ
На рис.2.1 приведена структурная схема системы вторичной радиолокации, совмещенная с первичным радиолокатором. Первичный радиолокатор представлен основными устройствами. В него входят синхронизатор, передающее устройство (ПРД), антенный переключатель (АП), приемо-передающая антенна (АУ1), приемник (ПРМ), схема развертки и индикатор.
Функцию наземного запросчика системы выполняет вторичный радиолокатор (ВРЛ), который состоит из шифратора, передающего устройства (ПРД), антенного переключателя (АП), антенного устройства (АУ), приемника ответных сигналов (ПРМ), дешифратора и устройства отображения информации.
Работа
СВРЛ заключается в следующем. Шифратор вторичного радиолокатора под действием
импульсов синхронизации от первичного радиолокатора формирует два импульса с
заданным кодовым интервалом ![]() между
передними фронтами. Кодовый интервал определяет содержание запрашиваемой
информации. Передающее устройство преобразует эти видеоимпульсы в радиоимпульсы
с несущей частотой запроса
между
передними фронтами. Кодовый интервал определяет содержание запрашиваемой
информации. Передающее устройство преобразует эти видеоимпульсы в радиоимпульсы
с несущей частотой запроса ![]() 1030 или
837,5 МГц, которые через антенный переключатель поступают в антенну и
излучаются в пространство. Диаграмма направленности ВРЛ узкая в горизонтальной
плоскости (не более
1030 или
837,5 МГц, которые через антенный переключатель поступают в антенну и
излучаются в пространство. Диаграмма направленности ВРЛ узкая в горизонтальной
плоскости (не более ![]() ) и широкая в вертикальной плоскости. Она вращается по
азимуту на
) и широкая в вертикальной плоскости. Она вращается по
азимуту на ![]() с периодом обзора 4-12 с.
с периодом обзора 4-12 с.
Самолетный ответчик (СО) состоит из антенно-фидерного устройства (АФУ), распределительного фильтра (РФ), приемника дешифратора запросных сигналов, шифратора ответных сигналов и передатчика.
При
облучении летательного аппарата лучом антенны запросчика запросные импульсы с
антенны ответчика через разделительный фильтр поступают в приемник, где
преобразуются, усиливаются по промежуточной частоте и детектируются. Таким
образом, на выходе приемника ответчика образуется пачка парных запросных
импульсов (рис.2.2). Временные кодовые интервалы ![]() ,
,![]() между парными импульсами запроса определяют
содержание информации, которую должен передать ответчик.
между парными импульсами запроса определяют
содержание информации, которую должен передать ответчик.
Рис. 2.2 Сигналы запроса на выходе приемника СО
Запросные сигналы поступают на вход дешифратора, в котором производится распознавание содержания запрашиваемой информации. В простейшем случае дешифратор представляет собой совокупность линий задержки с отводами через установленные стандартом временные интервалы запросных кодов и логических схем «И». в результате совпадения двух запросных импульсов в дешифраторе образуется управляющий импульс, который является командой шифратору для формирования импульсов координатного и соответствующего информационного кода, например, бортового номера или высоты и т.п. на информационные входы шифратора поступает закодированная информация от соответствующих датчиков(бортовой или условный номер N, высота H, запас топлива Q и т.п.) шифратор формирует пачку ответных видеоимпульсов, в которой закодирована запрашиваемая информация, снятая с соответствующего датчика. Эти импульсы поступают на вход передающего устройства, состоящего из подмодулятора, модулятора и генератора СВЧ.