Материал: Проектирование плановых и высотных инженерно-геодезических разбивочных сетей
 ,(29)
,(29)
 .(30)
.(30)
Таким образом, необходимую точность
измерения превышений в одиночном нивелирном ходе можно установить на основе
формул (25), (26), допустимую длину такого хода по формуле (30).
.3 Проектирование систем плановых и
высотных ходов с узловыми точками
Узловые точки в различных системах ходов не являются пунктами опорной сети и определяются с определенными погрешностями. Следовательно, хода в таких системах должны иметь допустимую длину меньшую, чем для одиночного хода между пунктами опорной сети при одинаковой точности измерений в них. И, соответственно, при одинаковой длине должны иметь более высокую точность угловых и линейных измерений для обеспечения одинаковой точности определения координат или высот относительно опорной сети.
Для применения первого принципа (метода) проектирования нормативными документами для некоторых типовых систем устанавливаются допуски на их геометрические параметры, обычно, через коэффициент к допускам для одиночных ходов.
Допуски могут быть получены специальными расчетами, которые приводятся ниже.
В качестве примера, установим
производственные допуски для применения первого метода проектирования некоторых
распространенных систем ходов с узловыми точками (рис. 1а, 2а, 3а, 4а, 5а).
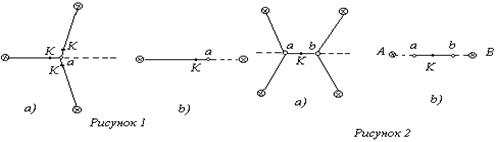
Рисунок 1- Система 1 Рисунок 2 -
Система 2
Рисунок 3 - Система 3
Рисунок 4 -Система 4
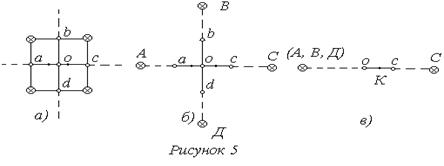
Рисунок 5 - Система 5
На рисунках 1-5 показаны этапы эквивалентных преобразований, сводящих системы к одиночным ходам, опирающимся на один или два твердых пункта.
Преобразования выполнены с таким расчетом, чтобы в процессе эквивалентных замен ход, включающий слабое место системы, или сама точка К с ожидаемой максимальной ошибкой, оставались реальными.
Подобное правило эквивалентных преобразований при проектировании рекомендуется в научно- технической литературе. Несоблюдение этого правила обязательно приводит к завышению ожидаемой точности проектируемой сети, т. е. может вызвать недоброкачественность результатов работ.
В результате эквивалентных преобразований систем ходов (рис. 1 - 5) установлены веса одиночных ходов, эквивалентных системам - Рэкв, веса узловых точек - Рузл и местоположение точки К (слабого места систем) относительно узловых точек i (а, b, с, d) через расстояние [S]iк (табл.1).
В таблице 1 номера систем соответствуют количеству узловых точек в системе и номерам рисунков; через п обозначено число ходов одинаковой длины [S] и весом, равным единице, сходящихся от твердых пунктов в узловых точках а, b, с, d.
С учетом Рэкв и Рузл (табл.1)
основные показатели систем могут быть вычислены по формулам:
![]() ,(31)
,(31)
![]() , (32)
, (32)
![]() ,(33)
,(33)
![]() ,(34)
,(34)
![]() ,(35)
,(35)
где [S]экв -длина хода,
эквивалентного системе;
[S]пр - допустимая длина ходов системы между узловыми, а также между узловыми и твердыми пунктами;
[S]0 - допустимая длина одиночного хода между твердыми пунктами;узл-ошибка уравненного положения узловых точек;
[S] и m- длина и ошибка хода (в системах) с весом, равным единице.
Таблица 1
Результаты эквивалентных
преобразований систем ходов с узловыми точками
Система
Рэкв
Рузл
[S]
iк
1
2
3
4
5 Данные таблицы 1 показывают, что увеличение
числа п в большей степени влияет на повышение точности определения узловых
точек и в меньшей - на точность определения точек, расположенных в слабых
местах систем. Следовательно, для уменьшения значений тк в первую очередь
следует стремиться к уменьшению длины ходов [S], а затем к увеличению числа п.
Основным производственным допуском при
проектировании систем является предельная длина ходов [S]np. Для рассмотренных
систем, согласно табл.1, она зависит от величины Рэкв и находится в пределах от
0,40 [S]0 до 0,75 [S]0, т. е. единого допуска устанавливать нельзя. В
технической же литературе часто приводится только один допуск без указания вида
систем, причем в разных источниках он колеблется от 0,5 [S]0 до [S]0.
Для установления местоположения слабого места
системы ходов одинаковой длины [S] с одной узловой точкой рекомендована
формула,
где Следует отметить, что многие
программы уравнивания на ЭВМ плановых и высотных ходов предусматривают оценку
точности положения только узловых точек, то есть не оценивают наиболее слабые
места систем.
Для рассматриваемых в качестве
примера, систем можно сделать следующие выводы:
основные показатели систем и
допуски, приведенные в таблицах 1 и 2, с учетом формул (31-35), могут быть
использованы как при первом, так и втором методах проектирования;
допустимая длина ходов в
рассмотренных системах колеблется от 0,40 до 0,75 предельной длины одиночного
хода между исходными пунктами, что в ряде случаев значительно расходится с
инструктивными допусками и требует уточнения последних;
Таблица 2
Значения коэффициентов к вычислениям
по формулам (31-35)
Значения
При
1
2
3
4
5
2
2,00
1,80
1,75
2,00
3
1,50
1,67
1,56
1,53
1,78
4
1,33
1,50
1,43
1,42
1,67
2
0,50
0,56
0,57
0,50
3
0,67
0,60
0,65
0,65
0,56
4
0,75
0,67
0,70
0,70
0,60 2
0,71
0,57
0,66
0,71
3
0,61
0,64
0,62
0,62
0,67
4
0,58
0,61
0,60
0,60
0,64
2
0,61
0,55
0,54
0,61
(0,61)*
3
0,58
0,52
0,47
0,47
0,58
(0,52)*
4
0,50
0,46
0,42
0,42
0,56
(0,46)*
для уменьшения ошибки определения точки,
расположенной в слабом месте системы, в первую очередь следует стремиться к
уменьшению длины ходов, а затем к увеличению числа ходов, сходящихся в узловых
точках;
эквивалентные преобразования при проектировании
следует производить с таким расчетом, чтобы точка в слабом месте системы или
ход, включающий ее, оставались реальными.
При втором принципе (методе)
проектирования установление необходимой точности измерений в системе ходов с
узловыми точками можно производить как и для одиночных ходов по формулам (9,
16, 17, 25, 26), если привести систему ходов путем эквивалентных преобразований
к одиночному ходу, включающему наиболее слабое место системы, вычислив значение
В случае, если слабое место системы
найти затруднительно, то следует отыскать вариант наиболее длинного эквивалентного
хода с установлением для него При расчетах по формулам (16), (17)
следует учесть выражения:
Для нахождения веса точки в наиболее
слабом месте системы ходов ( Так, например, обратный вес
уравненного планового или высотного положения любой точки F в системе ходов,
вес которых отражает формула (7), можно вычислить по рабочей формуле:
где Литература
1.
Постановление Правительства Российской Федерации от 19 января 2006 г. N 20 Об
инженерных изысканиях для подготовки проектной документации, строительства,
реконструкции объектов капитального строительства.
.
Инженерная геодезия: учебник для студентов высш. учеб. заведений / Е.Б. Клюшин,
М.И. Киселев,Д.Ш. Михелев, В.Д. Фельдман / под ред. Д.Ш. Михелева.- 9 - изд.-
М.: Издательский дом «Академия», 2008.- 480 с.
.
Пархоменко Н.А. Прикладная геодезия. Ч1. Геодезические разбивочные работы:
учебное пособие / Н.А. Пархоменко, А.И. Уваров.- Омск: Изд-во ФГОУ ВПО ОмГАУ,
2010.-69 с.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (36)
(36)
![]() - расстояние от узловой точки i до
слабого места системы (точки k); n - число ходов от исходных пунктов,
сходящихся в узловой точке.
- расстояние от узловой точки i до
слабого места системы (точки k); n - число ходов от исходных пунктов,
сходящихся в узловой точке.
![]() Для
систем
Для
систем
![]() 12,502,33
12,502,33
![]() 10,400,43
10,400,43
![]() 10,710,68--
10,710,68--
![]() .
.
![]() .
.
![]() ;
; ![]() ;
; ![]() .(37)
.(37)
![]() ), если веса при проектировании не
вычисляются строгим методом, например, с получением обратной матрицы весов на
ЭВМ, можно для простых систем применить, кроме способа эквивалентной замены,
известные методы полигонов или узлов, разработанные профессором В.В. Поповым
для уравнивания систем ходов.
), если веса при проектировании не
вычисляются строгим методом, например, с получением обратной матрицы весов на
ЭВМ, можно для простых систем применить, кроме способа эквивалентной замены,
известные методы полигонов или узлов, разработанные профессором В.В. Поповым
для уравнивания систем ходов.
![]() ,(38)
,(38)
![]() -длина ходовой линии от исходного
пункта до оцениваемой точки К,
-длина ходовой линии от исходного
пункта до оцениваемой точки К, ![]() - поправка на звенья ходовой линии,
полученная при разбрасывании свободных членов переходных уравнений по методу
полигонов проф. В.В. Попова; при этом, свободные члены переходных уравнений для
полигонов приравниваются к периметру участка ходовой линии, соприкасающегося с
полигонами, со знаками противоположными по обе стороны ходовой линии.
- поправка на звенья ходовой линии,
полученная при разбрасывании свободных членов переходных уравнений по методу
полигонов проф. В.В. Попова; при этом, свободные члены переходных уравнений для
полигонов приравниваются к периметру участка ходовой линии, соприкасающегося с
полигонами, со знаками противоположными по обе стороны ходовой линии.