Материал: ОАУ_ЛАБ.РАБ._4_ГОРДЕЕВА
Федеральное агентство железнодорожного транспорта
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ ИМПЕРАТОРА АЛЕКСАНДРА I»
(ФГБОУ ВО ПГУПС)
Кафедра «Информационные и вычислительные системы»
ОТЧЕТ
По лабораторной работе №4
Моделирование системы автоматического регулирования в среде Simulink.
Выполнил студент группы ПБ-613:
Гордеева Л.Ф.
Проверил преподаватель:
Красновидов А.В.
Санкт-Петербург
2020
Целью настоящей работы является освоение методов моделирования систем автоматического регулирования, заданных уравнением движения, дающих возможность определения влияния параметров модели на ее работоспособность в различных условиях.
В ходе выполнения лабораторной работы была разработана следующая схема:
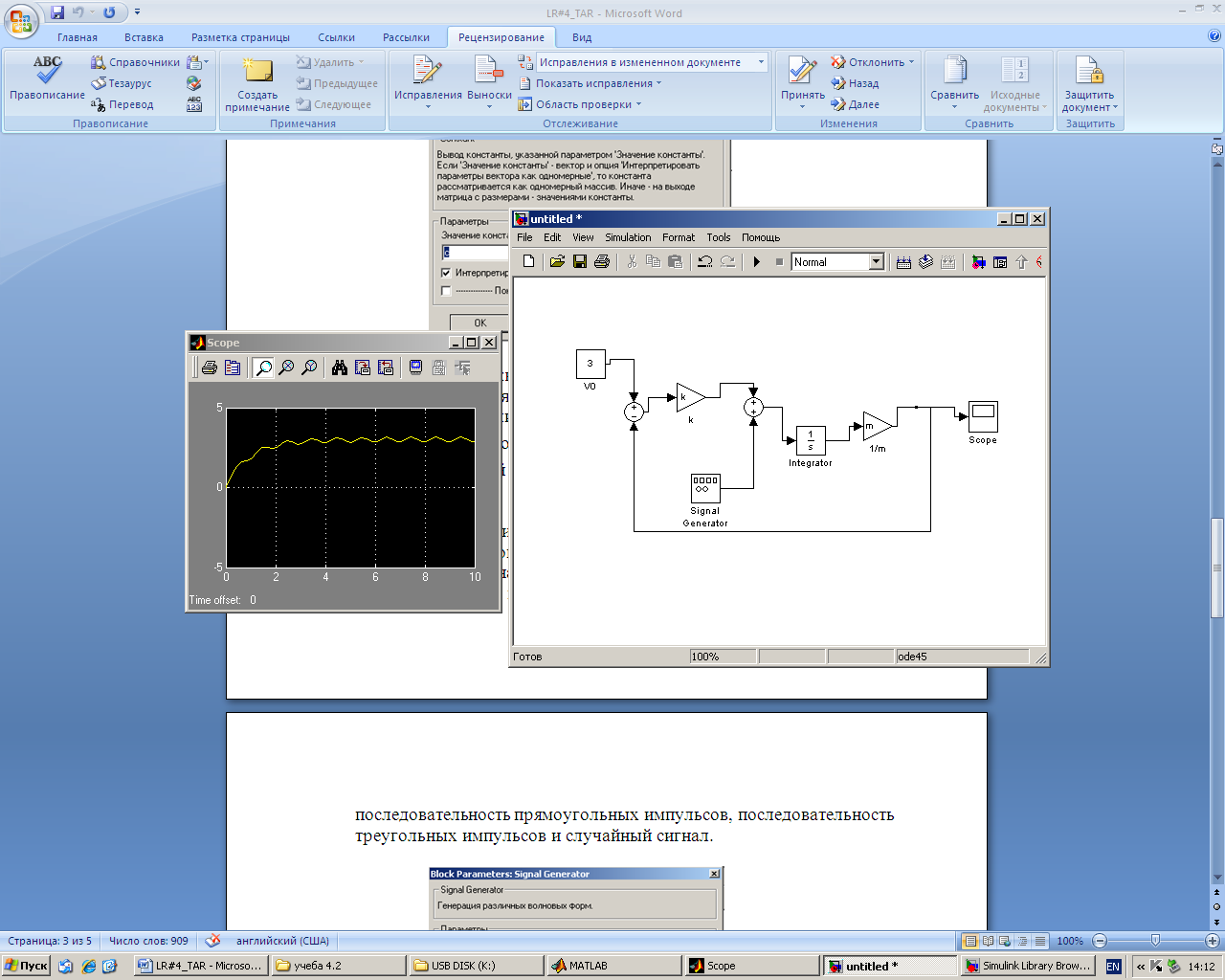
Для того чтобы подобрать оптимальные параметры m, k, c для работы модели, были выбраны следующие значения:
№ |
k |
m |
c |
1 |
0.2 |
0.4 |
10 |
2 |
0.5 |
0.5 |
10 |
3 |
1 |
1 |
10 |
В среде Matlab были определены среднее значение и дисперсия отклонения с помощью операндов Mean и Var соответственно.
Результаты расчетов представлены в таблице.
-
№
Среднее значение за всё время
Дисперсия за всё время
Среднее значение в установившемся режиме
Дисперсия в установившемся режиме
1
9,822629
1,17405
7,395266
10,70309
2
9,820284
1,100002
7,360369
10,43859
3
9,735135
1,327309
6,394217
7,093485
Из таблицы видно, что с увеличением параметров m и k, улучшается и работоспособность модели.
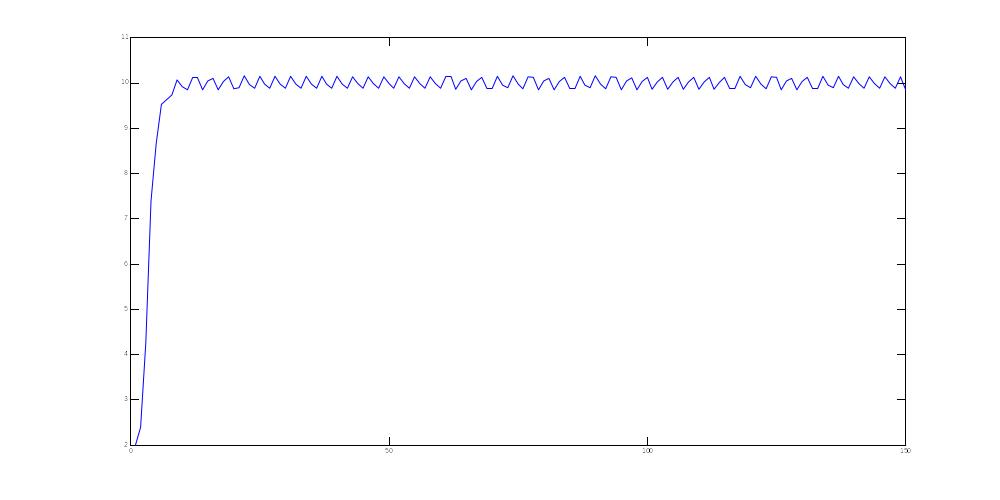
Остановившись на варианте, обеспечивающем минимальное среднее значение и дисперсию отклонения в установившемся режиме, был построен график результатов моделирования и отклонения, представленный ниже.
Вывод:
В результате лабораторной работы были освоены методы моделирования систем автоматического регулирования, заданных уравнением движения, дающих возможность определения влияния параметров модели на ее работоспособность в различных условиях. В ходе выполнения лабораторной работы была разработана схема и подобраны параметры уравнения автоматического регулирования.
С помощью среды Simulink и система Matlab было исследовано влияние параметров m и k, и определено минимальное отклонение разности между откликом модели и измеренным откликом реального объекта на одном и том же входном сигнале. Так же была обнаружена зависимость отклонения от величины коэффициентов, чем больше значение коэффициентов, тем меньше значение отклонения.