Материал: Моделирование двигателя постоянного тока в системе Scilab
Одним из основных операторов, реализующих ветвление в большинстве языков программирования, является условный оператор if. Существует обычная и расширенная формы оператора if в Scilab. Обычный if имеет вид :
условие
операторы1
операторы2
где условие - логическое выражение, операторы 1, операторы2 операторы языка Scilab или встроенные функции. Оператор if работает по следующем алгоритму: если условие истинно, то выполняются операторы 1, если ложно - операторы 2.
Для того, чтобы подавить выдачу текущих результатов, мы завершили соответствующие строки точкой с запятой.
Для задания условий используются операторы:
& (and) - логическое «и»
| (or) - логическое «или»
~ (not) - логическое отрицание
< - меньше
> - больше
== - равно
<> (~=) - не равно
>= - больше или равно
<=- меньше или равно
В случае сложных условий составляющие его элементарные условия заключаются в скобки.
При решении практических задач, как правило, недостаточно выбора выполнения или невыполнения одного условия. В этом случае можно пользоваться вложенным оператором if, то есть по ветке else написать новый оператор if, но лучше применить расширенную форму оператора if:
условие 1
операторы 1 if условие 2
операторы 2 if условие 3
операторы3 if условие n
Операторы n
операторы
Алгоритм работы этой конструкции следующий: если условие1 истинно, то
выполняются операторы1, иначе проверяется условие2, если оно истинно, то
выполняются операторы2, иначе проверяется условие3 и т. д. Наконец, если ни
одно из условий по веткам else и elseif не выполняется, то выполняются
операторы по ветке else.
3. Разработка алгоритмов для моделирования двигателя постоянного
тока
.1 Основные сведения о двигателе постоянного тока
Принцип действия (на примере двигателя параллельного возбуждения). Если к
двигателю подведено напряжение U, то по цепи возбуждения протекает ток Iв,
а по цепи якоря - ток Iя. Ток возбуждения создает МДС Fв
= Iв Wв, которая возбуждает в машине магнитный поток Фв.
Ток якоря, в свою очередь, создает магнитный поток реакции якоря Фя. Результирующий
магнитный поток
Фрез = Фв + Фя.
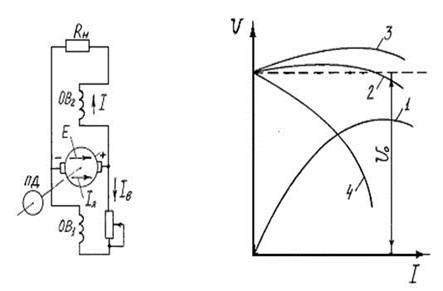
Рис. 2 Рис. 3
В цепи якоря ток Iя создает падение напряжения Rя Iя. В соответствии с законом электромагнитной силы ЭМС при взаимодействии тока Iя и магнитного потока Фрез создается вращающий момент Мвр. В установившемся режиме Мвр. = Мпр. Когда проводники якоря пересекают магнитное поле Фрез, в них в соответствии с законом электромагнитной индукции ЭМИ наводится ЭДС, которая направлена против напряжения сети U.
Классификация двигателей. По схеме включения обмоток возбуждения главных полюсов двигатели постоянного тока делятся на двигатели независимого, параллельного, последовательного и смешанного возбуждения.
В двигателях независимого возбуждения обмотка возбуждения питается от отдельного источника постоянного напряжения. В двигателях параллельного возбуждения обмотка возбуждения и обмотка якоря включены параллельно и питаются от одного источника. В двигателях последовательного и смешанного возбуждения есть обмотка возбуждения, включенная последовательно с обмоткой якоря. В двигателях малой мощности поток возбуждения может быть создан с помощью постоянных магнитов. Наибольшее применение находят двигатели параллельного и смешанного возбуждения.
Основные уравнения и величины, характеризующие двигатели. Такими величинами являются: механическая мощность на валу Р2, питающее напряжение U, ток, потребляемый из сети I, ток якоря Iя, ток возбуждения Iв, частота вращения n, электромагнитный момент Мэм. Зависимость между этими величинами описывается:
Ø уравнением электромагнитного
момента:
Мэм = См Iя Ф;
Ø уравнением электрического состояния цепи якоря:
= Епр + Rя Iя
Епр = СEnФ;
Ø уравнением моментов:
Мэм = Мс + Мпот + Мд,
где Мс - момент сопротивления на валу, создаваемый нагрузкой; Мпот - момент потерь, создаваемый всеми видами потерь в двигателе; Мд - динамический момент, создаваемый инерционными силами;
Характеристики двигателей. Важнейшей из характеристик является механическая n (Мс) - зависимость частоты вращения n от момента на валу (далее индекс «с» опускается) при U = const, Iв = const. Она показывает влияние механической нагрузки (момента) на валу двигателя на частоту вращения, что особенно важно знать при выборе и эксплуатации двигателей. Другие характеристики двигателей: регулировочная n (Iв), скоростная n (Iя), рабочие М, Р1, n , I, h(Р2) - здесь подробно не рассматриваются.
Механические характеристики могут быть естественными и искусственными. Под естественными характеристиками понимаются характеристики, снятые при отсутствии в схеме каких-либо дополнительных сопротивлений, например, реостатов в цепях якоря или возбуждения, искусственными - при наличии таких сопротивлений.
Уравнение механической характеристики двигателя. Оно может быть получено из (1.1). Подставим вместо Е ее значение,
= (U - Rя Iя)/СЕФ
Заменяя Iя его значением, получаем уравнение механической характеристики:
= ![]()
Вид механической характеристики определяется характером зависимости потока от нагрузки двигателя, что в свою очередь зависит от схемы включения обмотки возбуждения.
программный математический автоматизация двигатель
3.2 Описание методик определения характеристик объекта управления
При определении динамических характеристик объекта по его кривой разгона на вход подается или ступенчатый пробный сигнал, или прямоугольный импульс. Во втором случае кривая отклика должна быть достроена до соответствующей кривой разгона.
При снятии кривой разгона необходимо выполнить ряд условий:
. Если проектируется система стабилизации, то кривая разгона должна сниматься в окрестности рабочей точки процесса.
. Кривые разгона необходимо снимать как при положительных, так и отрицательных скачках управляющего сигнала. По виду кривых можно судить о степени асимметрии объекта. При небольшой асимметрии расчет настроек регулятора рекомендуется вести по усредненным значениям параметров передаточных функций. Линейная асимметрия наиболее часто проявляется в тепловых объектах управления.
. При наличии зашумленного выхода желательно снимать несколько кривых разгона с их последующим наложением друг на друга и получением усредненной кривой.
. При снятии кривой разгона необходимо выбирать наиболее стабильные режимы процесса, например, ночные смены, когда действие внешних случайных возмущений маловероятно.
. При снятии кривой разгона амплитуда пробного входного сигнала должна быть, с одной стороны, достаточно большой, чтобы четко выделялась кривая разгона на фоне шумов, а, с другой стороны, она должна быть достаточно малой, чтобы не нарушать нормального хода технологического процесса. Сняв кривую разгона, и оценив характер объекта управления (с самовыравниванием или без) можно определить параметры соответствующей передаточной функции. Передаточную функцию рекомендуется применять для объектов управления с явно выраженной доминирующей постоянной времени (одноемкостный объект). Перед началом обработки кривую разгона рекомендуется пронормировать (диапазон изменения нормированной кривой 0 - 1) и выделить из ее начального участка величину чистого временного запаздывания.
Пример. Дана нормированная кривая разгона объекта, у которой заранее
выделена величина чистого запаздывания![]() . Построим график кривой разгона
(рис. 4) по ее значениям, приведенным в таблице 1.1.
. Построим график кривой разгона
(рис. 4) по ее значениям, приведенным в таблице 1.1.
Таблица 5.
|
|
2 |
4 |
6 |
8 |
10 |
12 |
14 |
18 |
22 |
|
|
|
0 |
0,087 |
0,255 |
0,43 |
0,58 |
0,7 |
0,78 |
0,84 |
0,92 |
0,96 |
Рис. 4. График кривой разгона.
Динамический коэффициент усиления ![]() объекта определяется как отношение
приращения выходного сигнала к приращению входного в окрестности рабочей точки.
объекта определяется как отношение
приращения выходного сигнала к приращению входного в окрестности рабочей точки.
Определение динамических характеристик объектов по кривой разгона можно производить двумя методами.
) Метод касательной к точке перегиба кривой разгона.
) В данном случае точка перегиба соответствует переходу кривой от
режима ускорения к режиму замедления темпа нарастания выходного сигнала.
Постоянная времени Т и динамическое запаздывание ![]() определяются в соответствии с
графиком рис.1.4, т.е.
определяются в соответствии с
графиком рис.1.4, т.е. ![]() .
.
) Формульный метод позволяет аналитически вычислить величину
динамического запаздывания и постоянной времени по формулам
 ,
,  ,
,
где значение ![]() , берется в окрестности точки перегиба кривой, а значение
, берется в окрестности точки перегиба кривой, а значение ![]() принимается равным 0,8 - 0,85. По
этим значениям определяются и моменты времени
принимается равным 0,8 - 0,85. По
этим значениям определяются и моменты времени ![]() и
и ![]() .
.
Методику определения параметров динамической модели объекта без самовыравнивания
рассмотрим на примере кривой разгона уровня в барабане котла теплоагрегата.
Предполагается, что на вход объекта увеличили подачу воды на 10 т/час =DG, при
этом уровень начал увеличиваться. Приращение уровня зафиксировано в таблице
1.2.
Таблица 6.
|
|
0 |
100 |
200 |
300 |
|
|
0 |
20 |
76 |
135 |
Рис. 5. График разгонной характеристики объекта без самовыравнивания.
График разгонной характеристики объекта без самовыравнивания, построенной в соответствии с приведенной таблицей показан на рис. 1.5.
Для объекта без самовыравнивания коэффициент усиления определяется как отношение установившейся скорости изменения выходной величины к величине скачка входного сигнала. В нашем примере
![]()
![]()
Величина динамического запаздывания ![]() в объекте определяется так, как
показано на рис. 5.
в объекте определяется так, как
показано на рис. 5.
4. Моделирование двигателя постоянного тока в системе Scilab
Исходные данные:
|
Вариант |
Блок 1 |
Блок 2 |
Блок 3 |
Блок 4 |
|
6 |
1/0,0046 |
0,008/0,000001489 |
5,8 |
0,012 |
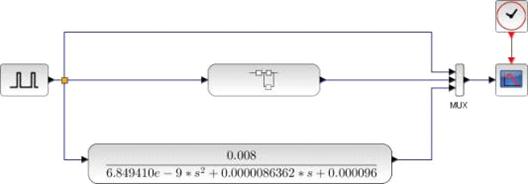
В соответствии с рисунком 1.1 и параметрами блоков модели по варианту 6
разработаем модель в Scilab.
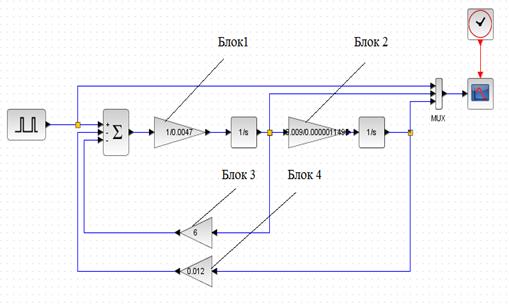
Рисунок 4.1 - Расположение блоков модели управления двигателем
постоянного тока посредством ШИМ
На рисунке 4.2 приведена разработанная модель с параметрами варианта 6. На рисунке 4.3 приведены параметры блока PULSE, формирующего ШИМ-сигнал.
На рисунке 4.4 приведены параметры блока CSCOPE (осциллограф), регистрирующего изменения переменных в модели.
На рисунке 4.5 приведены параметры блока CLOCK, управляющего
регистратором (осциллографом).
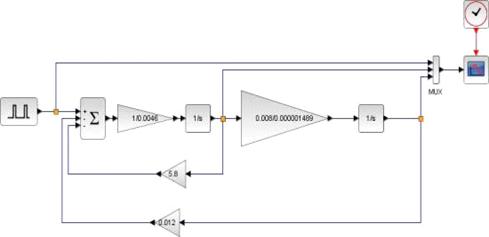
Рисунок 4.2 - Модель в Scilab с данными варианта 6
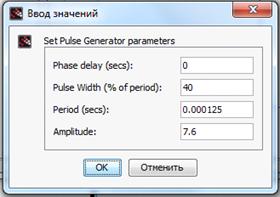
Рисунок 4.3 - Параметры блока PULSE
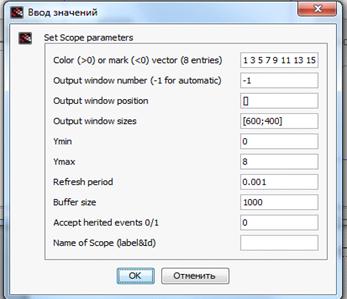
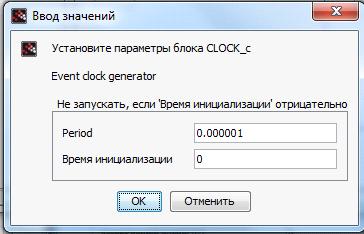
Рисунок 4.5 - Параметры блока CLOCK
Время моделирования установлено ![]() .
.
На рисунке 1.6 показаны результаты моделирования модели по рисунку 1.2.
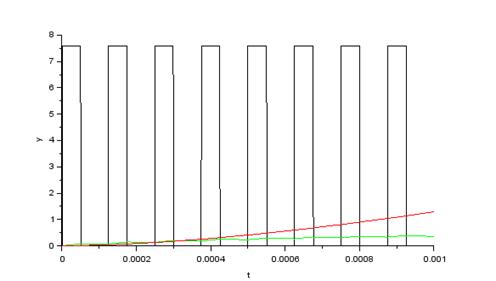
Рисунок 4.6 - Результаты моделирования
Далее в соответствии с методическими указаниями рассмотрим замену модели
двигателя одним звеном. Для этого выполним соответствующие преобразования
модели двигателя. На основе рисунка 4.1 структурную схему двигателя можно
представить в виде, показанном на рисунке 4.7.
Рисунок
4.7 - Структурная схема двигателя
В
соответствии с исходными данными по варианту № 6 параметры структурной схемы: ![]()
Преобразуем
данную структурную схему, заменив звенья с передаточными функциями ![]() ,
, ![]() и
и ![]() эквивалентным звеном. Преобразованная структурная
схема приведена на рисунке 1.8.
эквивалентным звеном. Преобразованная структурная
схема приведена на рисунке 1.8.
Рисунок
4.8 - Преобразованная структурная схема
Аналогично
преобразуем полученную структурную схему, заменив все звенья одним с
эквивалентной передаточной функцией (рис. 1.9).

Рисунок
4.9 - Преобразованная структурная схема
После
выполненных преобразований, с учетом исходных данных выполним моделирование
двигателя в виде одного звена. Результаты моделирования сравним с используемой
уже ранее моделью (рис. 1.2). Ранее используемую модель свернем с помощью блока
SUPER. Результирующая модель показана на рисунке 4.10.