Материал: Микропроцессорная система управления объектом
Микропроцессорная система управления объектом
Содержание
Введение
. Техническое задание на разработку микропроцессорной системы управления
. Структурная схема микропроцессорной системы управления
. Разработка принципиальной схемы блока чтения информации с датчиков
.1 Разработка устройства сопряжения с цифровым датчиком
.2 Разработка устройства сопряжения с аналоговым датчиком
.3 Сопряжения контроля наличия напряжения питания
. Разработка принципиальных схем блоков вывода управляющих сигналов
.1 Схема подключения МК с исполнительными механизмами
. Разработка принципиальной схемы блока последовательного канала связи
. Разработка принципиальной схемы пульта управления
. Разработка общего алгоритма управления микропроцессорной системы
. Алгоритм работы блока чтения информации с цифровых датчиков
. Алгоритм работы блока чтения информации с аналоговых датчиков
. Алгоритм работы блока обмена данными по последовательному каналу связи
. Алгоритм работы блока взаимодействия с оператором
. Алгоритм обработки аварийных ситуаций
. Расчет электрических параметров микропроцессорной системы управления
. Разработка блока питания
Заключение
Список литературы
Приложение
Введение
Развитие микроэлектроники и широкое применение ее изделий в промышленном производстве, в устройствах и системах управления самыми разнообразными объектами и процессами являются в настоящее время одним из основных направлений научно-технического прогресса.
За последние годы в микроэлектронике бурное развитие получило направление, связанное с выпуском однокристальных микроконтроллеров, которые предназначены для «интеллектуализации» оборудования различного назначения.
Однокристальные микроконтроллеры представляют собой приборы, конструктивно выбранные в виде БИС и включающие в себя все составные части «голой» микроЭВМ: микропроцессор, память программ и память данных, а также программируемые интерфейсные схемы для связи с внешней средой.
Среди предложенных новых архитектур однокристальных микроЭВМ следует выделить 8-и разрядную архитектуру семейства микроконтроллеров MCS-51, предложенного фирмой INTEL в 1981г. Она удовлетворяет всем требованиям, представляемым к однокристальным микроконтроллерам.
Однако к настоящему времени значительную часть мирового рынка микропроцессорных средств составляет другой вид однокристальных контроллеров - это так называемые периферийные интерфейсные контроллеры или PIC. Они представляют собой высокопроизводительные БИС, в которые интегрированы помимо цифровых устройств (собственно микроконтроллера) также и аналоговые - это различные АЦП, компараторы, модули сравнения ШИМ и т.д. Это делает данные устройства чрезвычайно популярными у производителей «интеллектуальных» устройств. Наиболее известным в нашей стране производителем однокристальных PIC является американская компания Microchip Technology Inc. Она производит три линейки 8-разрядных PIC.
Главная особенность микропроцессора - возможность программирования логики
работы. Поэтому МПС используются для управления процессом измерения
(реализацией алгоритма измерения), обработки опытных данных, хранения и вывода
результатов измерения и пр.
1. Техническое задание на разработку микропроцессорной системы управления
В курсовой работе разрабатывается микропроцессорная система управления
некоторым объектом (рисунок 1).

Рисунок 1 - Структурная схема управления объектом
Микропроцессорная система принимает информацию об объекте управления от аналоговых и цифровых датчиков, вырабатывает управляющие воздействия (Y) в соответствии с законами управления и подает их на исполнительные механизмы. Микропроцессорная система состоит из микроконтроллера - управляющего микро-ЭВМ, пульта управления и последовательного канала связи. С помощью пульта управления оператор получает возможность управлять работой микро-ЭВМ: запускать ее и останавливать, выдавать значение некоторых установок (констант), снимать с индикаторов информацию о состоянии объекта и т. п. С помощью последовательного канала связи микропроцессорная система может передавать обработанную информацию системе более высокого уровня по ее запросу.
В курсовой работе разрабатывается структурная схема микропроцессорной системы, включая устройства связи с датчиками и исполнительными механизмами, и программы, обеспечивающие выполнение алгоритма управления и алгоритма обмена, осуществляется оценка характеристик микропроцессорной системы и разработка блока питания. В разделе, посвященном расчету электрических параметров системы, необходимо рассчитать потребляемый ток и мощность по каждой из цепей питания. На основании этих расчетов разрабатывается или выбирается готовый блок питания.
Обработка цифровой информации. Микропроцессорная система опрашивает
двоичные датчики X1, ..., Х5 и вычисляет нулевые функции ![]() , в соответствии заданием на
курсовую работу.
, в соответствии заданием на
курсовую работу.
При единичном значении функции ![]() ,
,![]() или
или ![]() система вырабатывает выходной сигнал
система вырабатывает выходной сигнал ![]() =1 длительностью
=1 длительностью ![]() =120 мкс ,
=120 мкс , ![]() ,
, ![]() соответственно. Это означает, что
через
соответственно. Это означает, что
через ![]() ,
,![]() или
или ![]() после выдачи единичного сигнала Y1
необходимо выработать нулевой сигнал Y0. В системе имеется также двоичный
датчик аварийной ситуации Х0, единичный сигнал с которого должен вызвать
аварийный останов системы в любой момент выполнения рабочего цикла программы.
после выдачи единичного сигнала Y1
необходимо выработать нулевой сигнал Y0. В системе имеется также двоичный
датчик аварийной ситуации Х0, единичный сигнал с которого должен вызвать
аварийный останов системы в любой момент выполнения рабочего цикла программы.
Обработка аналоговой информации. Сигналы с аналоговых датчиков V1, V2 преобразуются в цифровую форму в АЦП. Далее сформированные коды N1 и N2, представляющее собой целые числа без знака, поступают на обработку. Величина К - 8-разрядный код установки, поступающий с тумблерного регистра пульта управления. Далее система вычисляет функцию:
= max(N1;N2-K)
Полученное значение функции N сравнивается с константой Q, хранящейся во внутренней памяти. В зависимости от результатов сравнения система вырабатывает двоичные управляющие воздействия Y2 (если N<Q) или Y3 (если N>Q) длительностью Т3 или Т4 соответственно.
Обработка запросов на прерывания
Система обрабатывает запросы на прерывание пяти уровней:
запрос на прерывание по сигналу отказа источника питания IRQ0;
запрос на прерывание по сигналу аварийного датчика IRQ1;
запрос на прерывание от терминала внешней ЭВМ IRQ2;
запрос на прерывание от таймера IRQ3;
запрос на прерывание от пульта управления (прерывание оператора) IRQ4.
Прерывание работы системы при отказе источника питания имеет высший приоритет. Система при этом переходит на резервный источник питания (батарейка) вырабатывает сигнал Y5 установки внешних устройств в исходное состояние (например, отвод головок от диска, останов дисковода и т. д.) и передает в последовательный канал связи (если он был активен) код символа «!». Сигнал Y5 представит собой два прямоугольных импульса длительностью 30 мкс, следующие с интервалом в 30 мкс. После выполнения указанных действий микроконтроллер необходимо перевести в режим пониженного энергопотребления.
Прерывание от сигнала аварийного датчика включает на пульте управления аварийную световую и обеспечивает выдачу на индикацию сигналов двоичных датчиков X1, ..., Х4 и цифровые коды N1 и N2, поступающий с АЦП. После этого микроконтроллер переводится в режим пониженного энергопотребления.
Прерывания от терминала внешней ЭВМ осуществляются при приеме последовательным каналом связи символа управления обменом. Приемник последовательного адаптера выставляет при этом запрос на прерывание работы основной программы с целью передачи в последовательный канал связи запрашиваемой информации. Запрашиваемая информация формируется в зависимости от принятого из канала символа. При приеме символа "D" в канал передается значение Y1, при приеме символа "А" - значение Y4. После загрузки в буфер передатчика БИС последовательного адаптера запрашиваемой информации управление передается в прерванную программу. Прерывания от пульта управления влекут за собой выполнение следующих действий:
) Считать информацию с тумблерного регистра.
) Запись информации по заранее заданному адресу.
) Организовать выход из прерывания на начало программы обработки.
) Пульт управления
) Пульт управления должен содержать следующие элементы:
) регистр со светодиодами индикации значения N1 - РИ1;
) регистр со светодиодами индикации значений X1,..., Х4 - РИ2;
) регистр со светодиодами индикации значений Y1, Y2 - РИЗ;
) регистр со светодиодами индикации кода Y4 - РИ4;
) входной восьмиразрядный регистр Р5 для приема с тумблеров пульта кода К (для вариантов, в которых он используется);
) светодиод индикации, на который подается меандр частотой 2 Гц;
) кнопку «Сброс», при нажатии на которую производится начальная установка элементов системы;
) тумблер «Останов», опрашиваемый в конце каждого цикла выполнения программы.
Несколько регистров могут быть объединены в один с возможностью выбора
текущего значения оператором.
2. Структурная схема микропроцессорной системы управления
Структурная схема системы управления представлена на рисунке 2.
Рисунок
2 - Структурная схема системы управления
На
рисунке представлена структурная схема системы управления, на которой указаны
подключения к микроконтроллеру всех датчиков. При подключении датчиков, для
согласования сигналов, использованы устройства сопряжения. Кроме того, на схеме
указано подключение к микроконтроллеру пульта управления. Также на схеме
показаны все выходные сигналы, используемые для управления различными
устройствами. Контроллер обменивается данными с системой более высокого уровня
по интерфейсу RS-485. Подключение датчиков, пульта управления и схемы
индикации осуществляется посредством общей 8-разрядной шины, подключенной к
порту D контроллера. Подключение пульта управления и устройств сопряжения к шине
осуществляется с помощью блока расширения ввода (БРВВ). Кроме того, этот блок
формирует запросы прерываний.
Таблица 1 - Расчет количества линий ввода-вывода
|
Назначение линии, группы линий |
Направление |
Тип сигнала |
Количество |
|
Цифровые датчики |
I |
D |
6 |
|
Аналоговые датчики |
I |
A |
2 |
|
USART: Tx Rx |
I O |
D A |
1 1 |
|
I2C: SCL SDA |
I I/O |
D D |
1 1 |
|
Аварийная звуковая сигнализация |
O |
D |
1 |
|
Тумблер “Остановка” |
O |
D |
1 |
|
Кнопки: “Сброс” “Прерывание оператора” |
I I |
D D |
1 1 |
|
Схема контроллера источника питания |
I |
D |
1 |
|
Блок организации запроса прерывания (INT) |
I |
D |
1 |
|
Выходные сигналы |
O |
D |
4 |
|
Итого |
|
|
22 |
Исходя из таблицы расчета количества линий ввода-вывода, используемый МК должен соответствовать следующим критериям:
число линий ввода/вывода -22;
наличие модулей USART и MSSP.
В качестве МК выбираем микросхему PIC16F874A.Характеристики МКPIC16F874A
представлены в таблице 2.
Таблица 2 - Характеристики МК PIC16F874A
|
Тактовая частота |
DC- 20МГц |
|
Сброс (задержка сброса) |
POR, BOR(PWRT, OST) |
|
FLASH память программ (14-разрядных слов) |
4K |
|
Память данных (байт) |
192 |
|
EEPROM память данных (байт) |
128 |
|
Прерываний |
14 |
|
Порты ввода/вывода |
Порты A,B,C,D,E |
|
Таймеры |
3 |
|
Модуль захват/сравнение/ШИМ |
2 |
|
Модули последовательного интерфейса |
MSSP, USART |
|
Модули параллельного интерфейса |
PSP |
|
Модуль 10-разрядного АЦП |
8 каналов |
|
Инструкций |
35 |
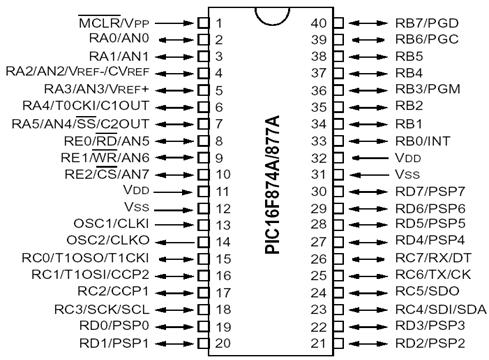
Рисунок 3 -Цоколевка PIC16F874A
3. Разработка принципиальной схемы блока чтения информации с датчиков
3.1 Разработка устройства сопряжения
с цифровым датчиком
Схема сопряжения обеспечивает гальваническую развязку бинарного датчика и
линии ввода контроллера. Основой схемы является транзисторный оптрон, который
выполняет функции устройства гальванической развязки и ключевого элемента.
Рисунок
4 - Схема устройства сопряжения с цифровым датчиком
Схема может быть условно разделена на 2 цепи: входную и выходную. Входная цепь образована преобразователем уровней и светодиодом оптрона. Преобразователь уровней и приводит уровни входных сигналов к значениям, необходимым для надежной работы светодиода оптрона. Схема входной цепи зависит от уровней входных сигналов. В нашем случае она включает в себя резистор R1.
В данной схеме будем использовать оптрон АОТ101АС: Uпр = 1,6 В при Iпр= 5 мА.
Стабилитрон выбирается из соотношения:
![]()
Будем использовать стабилитрон КС175Ж с параметрами: ![]() В при
В при ![]()
Сопротивление резистора R1 в схеме рассчитывается по формуле
![]() ,
,
где |Uвх|max - максимальный из модулей входных
напряжений (|Uвх|max =10 В);пр - прямое
падение напряжения на светодиоде оптрона;пр - прямой ток через
светодиод оптрона.