Материал: Методы обратного проектирования и определение способов создания трёхмерных моделей на основе данных трёхмерного сканирования разных видов
Методы обратного проектирования и определение способов создания трёхмерных моделей на основе данных трёхмерного сканирования разных видов
Содержание
Введение
Глава 1. Обратное проектирование. Теория
.1 Обратное проектирование
.2 Системы автоматизированного проектирования (САПР)
.3 Лазерные сканеры. Принцип работы
.3.1 Внешнее ориентирование трехмерной модели по опорным точкам
1.4 Фотограмметрические 3d-сканеры
.5 Контактные 3d-сканеры
.6 Виды представления трёхмерных данных в процессе обратного проектирования
.6.1 Облако точек
1.6.2 Полигональная сетка
.6.3 Твердотельные модели
.6.4 Nurbs-поверхности
Глава 2. Этапы обратного проектирования модели реально существующего объекта
2.1 Сканирование объекта
.2 Обработка полигональной модели в Geomagic Wrap
.3 Вписывание параметрических поверхностей в полигональную сетку для построения твердотельной модели методом граничного представления (B-Rep)
Глава 3. Другие результаты обратного проектирования
.1 Построение модели по фотографиям
3.2 Обработка полигональной сетки и построение параметрических поверхностей в Geomagic Wrap
Заключение
Список использованной литературы
Приложение 1. Технические характеристики 3D-сканера Artec Spider (EVA-5)
Введение
За последние два столетия научно-технический прогресс совершил настолько большой скачок в качественном и количественном отношении, что это не могло не отразиться на развитии, способах и методах изучения и познания большинства научных дисциплин. Это также касается инженерной (прикладной) геодезии и наземной (прикладной) фотограмметрии, обеспечивающих различные сферы человеческой деятельности методами, техникой и организацией геодезических и фотограмметрических работ для решения инженерных и других задач. Одной из таких задач является обратное проектирование, которое представляет собой совокупность методов, способов и технических решений определения формы, размеров, конструкции, функционирования и иных характеристик объектов реального мира.
С развитием технологии, экономики и конкуренции в мире обратное проектирование становится передовым методом изучения объектов их структуры, конструкции и функционирования. Этот метод, используя современнейшие способы получения пространственной информации об объекте, позволяет вернуть утерянную или вовсе не существующую, всеобъемлющую информацию о предмете исследования. Использование этого метода для копирования продуктов в целях преуспевания в конкуренции, конечно, не приветствуется законом. Но основным положительным моментом использования обратного проектирования является не дублирование объекта, а его изучение с целью доработки и выпуска нового, более совершенного продукта. Совершенствование чего-либо на основе опыта прошлых лет всегда было, есть и будет основой научно-технического и любого другого прогресса. Поэтому совершенствование этого направления напрямую влечёт за собой развитие других наук и дисциплин.
Суть данной работы заключается в изучении методов обратного проектирования, определении способов создания трёхмерных моделей на основе данных трёхмерного сканирования разных видов.
Для реализации поставленной цели необходимо было решить следующие задачи:
Изучить понятие обратного проектирования.
Рассмотреть виды трёхмерного сканирования, их достоинства, недостатки, решаемые задачи и т.д.
Проанализировать способы построения моделей по данным трёхмерного сканирования.
Научится пользоваться теми функциями программного обеспечения, с помощью которых будет строиться трёхмерная модель.
Построить модели объектов по данным полученным различными методами трёхмерного сканирования.
Глава 1. Обратное проектирование. Теория
.1 Обратное проектирование
Обратное проектирование (Reverse engineering) - это процесс проектирования цифровой модели, которая описывает объект и его технологические свойства путем выполнения комплексного анализа его структуры. Этот процесс направлен на создание виртуальной 3D-модели на основе существующего физического объекта для его изучения, дублирования или улучшения.[2] обратный проектирование сканер фотография
Существует множество причин для использования обратного проектирования. Например, использование этого процесса оправданно, когда исходный проект не имеет адекватной проектной документации в виде конструкторских чертежей или трехмерных данных. В некоторых случаях оригинальный производитель больше не производит продукт или не существует, а для сохранности и функционирования продукта необходимо разработать требования к его использованию, для чего потребуется всеобъемлющая проектная документация. В случае изношенных или повреждённых компонентов, которые больше не поставляются или устарели, обратное проектирование поможет проанализировать особенности их строения, для последующего улучшения их характеристик и свойств, для обновления устаревших материалов или возобновления производственного процесса.[2,17,34]
Обратное проектирование позволяет значительно сократить время на разработку 3D-модели, и является единственной возможностью математически описать какое-либо уникальное изделие, на которое отсутствует конструкторская или любая другая документация.[17]
Для того, чтобы создать 3D-модель объекта, объект должен быть измерен с использованием 3D технологий сканирования (контактные, лазерные, ручные 3d сканеры и т.д.). После того, как операция сканирования выполнена, возможно, построение 3D модели с использованием САПР (систем автоматизированного проектирования).
.2 Системы автоматизированного проектирования (САПР)
САПР или система автоматизированного проектирования (англ. CAD - Computer-aided engineering) - автоматизированная система, реализующая информационную технологию выполнения функций проектирования, представляет собой организационно-техническую систему, предназначенную для автоматизации процесса проектирования, включающая комплекс технических, программных и других средств автоматизации с заложенными в них инженерными решениями. Автоматизация не означает самостоятельную работу системы без участия человека. В САПР часть функций выполняет оператор, а автоматическими являются только отдельные проектные операции и процедуры направленные на проведение расчётов и проверок инженерных решений.[20] Компьютеризация процесса проектирования позволяет оптимизировать процесс производства в целом, уменьшить материальные и трудовые затраты. Замена устаревшей технологии на более прогрессивную предполагает существенное снижение роли человеческого фактора в технологических процессах различных производств.[7,8]
По специализации САПР можно классифицировать следующим образом:
.MCAD (англ. mechanical computer-aided design) - автоматизированное проектирование механических устройств. Это машиностроительные САПР, применяются в автомобилестроении, судостроении, авиакосмической промышленности, производстве товаров народного потребления, включают в себя разработку деталей и сборок (механизмов) с использованием параметрического проектирования на основе конструктивных элементов, технологий поверхностного и объемного моделирования (SolidWorks, Autodesk Inventor, КОМПАС, CATIA);
.EDA (англ. electronic design automation) или ECAD (англ. electronic computer-aided design) - САПР электронных устройств, радиоэлектронных средств,интегральных схем, печатных плат и т. п., (Altium Designer, OrCAD);
.AEC CAD (англ. architecture, engineering and construction computer-aided design) или CAAD (англ. computer-aided architectural design) - САПР в области архитектуры и строительства. Используются для проектирования зданий, промышленных объектов, дорог, мостов и проч. (Autodesk Architectural Desktop, AutoCAD Revit Architecture Suite, Bentley MicroStation, Bentley AECOsim Building Designer, Piranesi, ArchiCAD, Geomagic Wrap).[6,7,9]
.3 Лазерные сканеры. Принцип работы
В настоящее время для решения строительных и архитектурных задач широко используется тахеометрическая съемка, которая позволяет получить координаты объектов, а затем представить их в графическом виде. Точность этого вида съёмки достигает нескольких миллиметров, а скорость измерения составляет не более 2 итераций в секунду. Это эффективно, когда область съёмки не загружена объектами и геометрия объектов простая.
Эти показатели зачастую недостаточны для проведения съёмки на таких сложных объектах, как фасады зданий, заводов, сложных архитектурных и промышленных объектов. Еще большим недостатком является слишком маленькое для подробного отображения форм количество точек на 1м2.[11,12]
Решение этих проблем пришло с применением новых технологий исследования, а именно лазерного сканирования.
Лазерное сканирование (лидар, от англ. LIDaR - laser indetification, detection and ranging) - технология, позволяющая создать цифровую трехмерную модель объекта, представив его набором точек с пространственными координатами. Технология основана на использовании современных геодезических приборов - лазерных сканеров, которые включают в себя теодолит, высокоскоростной лазерный дальномер, систему зеркал и моторов, плюс разные модификации.[14,15] Скорость измерений составляет от нескольких сотен до миллиона итераций в секунду, а точность достигает от 5 до 1 мм. Координаты точек, полученные в результате сканирования объекта, объединяются в большую группу точек (от сотен до миллионов), называемую облаком точек или трёхмерной точечной моделью. Такой набор точек с известными координатами можно использовать, чтобы создать очень точную трёхмерную модель исследуемого объекта, а также плоские чертежи разных частей объекта или его сечения.[14]
Лазерное сканирование можно применять для исследования различных по форме и размерам объектов, например: архитектурных памятников, зданий, сооружений, промышленных установок и других сложных объектов.
Устройство сканера объединяет в себе теодолит, лазерный дальномер,
сенсор, систему зеркал и моторов. Таким образом, для каждой точки объекта,
регистрируются горизонтальный j и вертикальный n углы с помощью теодолита, расстояние D измеряется с
помощью лазерного дальномера, а интенсивность отраженного сигнала дальномера
d с помощью сенсора (рис.1).
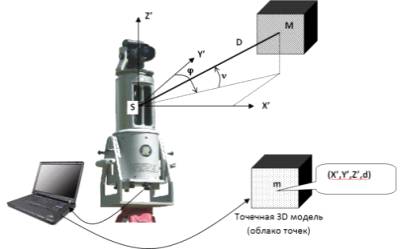
Рис.1 Схема получения облака точек объекта лазерным сканированием.
Чтобы регистрировать параметры j, n, D и d каждой точки с определённым интервалом между ними и в заданных пределах области видимости, задаётся максимальное и минимальное значение - диапазон горизонтальных и вертикальных углов (jmin,nmin и jmax,nmax) и шаг изменения этих углов (Dj,Dn).
Используя эти параметры, сканер с помощью системы зеркал и моторов последовательно устанавливает луч лазера на заданный угол и регистрирует параметры j, n, D и d для каждой точки объекта в заданных пределах. Так как точность смещения моторами луча лазера на шаг(Dj,Dn) ниже точности измерения углов(j, n), то для каждой точки сканирования регистрируются значения j, n.
Координаты точек модели объекта вычисляются по формулам:
 (1)
(1)
Координаты точек модели объекта X’,Y’,Z’ получаются в пространственной системе координат сканера (модели) SX’Y’Z’ (рис.1). Эта система координат связана с системой отсчетов горизонтальных и вертикальных углов в сканере.
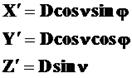
В зависимости от метода измерения расстояния D сканеры можно разделить на три группы: импульсные, фазовые и триангуляционные.
Импульсные сканеры основаны на измерении времени t (рис.2a) прохождения лазерного луча от сканера до объекта и обратно. В этом случае расстояние вычисляется как:
![]() (2)
(2)
где v - скорость распространения электромагнитных волн.
Фазовые сканеры основаны на измерении разности фаз ∆φ
(рис.2b) посылаемых
и принимаемых модулированных сигналов и количества целых длин волн между
сканером и объектом. Расстояние можно вычислить по формуле:
![]() (3)
(3)
где К - целое количество длин волн, укладывающихся на данном расстоянии.
λ - длина волны.
∆φ - разность фаз между прямой и
обратной волной.
Главное преимущество фазового метода измерения расстояний - более высокая точность и скорость съемки.[11,12,14]
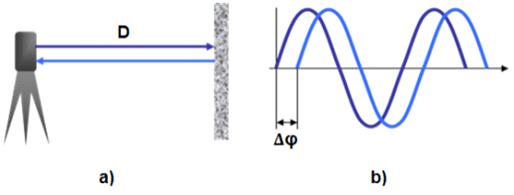
Триангуляционные сканеры имеют отличную от других конструкцию, здесь излучатель и приёмник сигнала разнесены на известное расстояние (базис-B,рис.3). Лазерный луч или полоса проецируются на объект излучателем, а сенсор (приёмник) измеряет расстояние до поверхности объекта. Поэтому определение пространственных координат точки объекта, сводится к решению треугольника.
Рис.3. Триангуляционный метод.[21]
Такой метод сканирования отличается высочайшей точностью измерения доходящей до сотых долей миллиметра, но на дистанции, не превышающей нескольких метров. Триангуляционные сканеры применяются для точной съёмки в машиностроении, реставрации, архитектуре, медицине и т.д. Триангуляционные сканеры бывают портативными(ручными) и стационарными. В первом случае, чтобы получить трёхмерную модель объекта необходимо определять положения сканера относительно объекта в каждый момент времени. Для этого можно использовать отражающие марки, по которым программное обеспечение определит положение сканера. Либо используется лазерный трекер, представляющий собой систему с самонаводящимся на сканер тахеометром, который во время съёмки определяет положение сканера в каждый момент времени.[22,35]
.3.1 Внешнее ориентирование трехмерной модели по опорным точкам.
Чтобы сориентировать модель в пространстве относительно системы координат
объекта, нужно выполнить внешнее ориентирование модели, так как во время съёмки
система координат сканера не ориентируется в какой либо другой пространственной
системе координат. Для этого используют опорные точки, координаты которых
определяются геодезическими методами, например тахеометрией. Опорные точки
представляют собой специальные маркированные точки (рис.4), центры которых
можно очень точно распознать автоматически, либо определить их, визуализируя
данные лазерного сканирования в каком-либо программном обеспечении.

Рис.4. Марки (опорные точки).
Преобразование координат осуществляется по формулам:
 (4)
(4)
где X,Y,Z - координаты точки объекта в системе координат объекта OXYZ; X’Y’Z’ - координаты точки объекта в системе координат сканера (модели) SX’Y’Z’, вычисляемые по (1); X0,Y0,Z0 - координаты начала системы координат сканера SX'Y'Z' относительно системы координат объекта; A - матрица поворота, зависящая от трех углов наклона w,a,k системы координат сканера относительно системы координат объекта.[14,15,16,27]
Элементы внешнего ориентирования модели X0,Y0,Z0,w,a,k можно определить по опорным точкам. Их должно быть не менее 3, не лежащих на одной прямой. Конечно, для более точного ориентирования лучше иметь большее количество опорных точек, разнесенных по площади сканирования.
Пересчитав координаты всех точек модели в геодезические координаты, получим точечную модель ориентированную относительно реально существующего объекта.
Чаще всего для съёмки всего объекта целиком недостаточно снимать его в одном положении сканера. Обычно делают несколько съёмок с разных точек стояния, так чтобы максимально охватить весь объект. В результате получают несколько точечных моделей объекта, которые нужно объединить в одну. Это делается при помощи опорных точек в зоне перекрытия съёмки. Иногда в качестве связующих точек используют естественные контура объекта, попавшие в зону перекрытия моделей. Облака точек двух моделей ориентируются друг относительно друга по опорным точкам на основе уравнений 4. Впоследствии уже готовая облачная модель целого объекта ориентируется относительно геодезической системы координат на основе тех же уравнений.[14,15,16]