Материал: mekhatronika_UrGUPS
обеспечивающие интеллектуальное управление со степенью интеллектуальности хотя бы в малом (раздел 2.2.2).
Примеры мехатронных модулей различного уровня приведены на рис. 2.1 [1].
|
Интеллектуальные мехатронные модули |
||
|
Мехатронные модули движения |
||
|
Модули движения |
|
|
Управляющие |
Двигатель |
Механическое |
|
и электронные |
|||
устройство |
|||
устройства |
|
||
|
|
||
Информационное
устройство
Рис. 2.1. Классификация мехатронных модулей
Информационно-измерительные мехатронные модули предназначены для сбора, обработки, передачи, хранения и представления достоверной информации в удобном для вычислительной техники виде для реализации управления мехатронными системами.
Мехатронные модули систем управления различного уровня предназначены для управления сложными динамическими объектами и предполагают многоуровневую иерархическую структуру, включающую стратегический, тактический и исполнительный уровни управления, имеющие доступ к информационно-измерительному мехатронному модулю для решения задач управления на каждом иерархическом уровне управления мехатронной системы.
В общем случае сложность задач управления мехатронными системами обуславливает целесообразность и необходимость их реше-
21
ния с привлечением методов и технологий искусственного интеллекта (раздел 2.2.2).
III. В определении мехатронных систем подчеркнут синергетический характер интеграции разнородных элементов в мехатронных модулях и системах.
Термин «синергетика» был предложен в 70-х годах XX века немецким физиком Г. Хакеном и обозначал совместное действие и сотрудничество, направленное на достижение общей цели. Важно подчеркнуть, что синергетическое объединение (интеграция) предполагает не простое соединение отдельных частей системы, а достижение за счет объединения более высоких результатов. Практикуется конструктивное встраивание разнородных мехатронных элементов в конструкцию мехатронных модулей – создание встроенных систем.
IV. В определении мехатронных систем также декларируется необходимость интеллектуализации мехатронных и робототехнических систем в первую очередь за счет применения интеллектуальных систем управления.
В заключение данного раздела введем понятие интеллектуальной мехатронной машины, представляющей синтез ИММД и мехатронного модуля управления.
Интеллектуальная мехатронная машина (ИММ) – это интеллектуальная многомерная система, построенная на мехатронных принципах и технологиях, которая способна эффективно выполнять программы функциональных движений в условиях нечеткой и неполной информации о целях, эксплуатационных характеристиках машины и параметрах внешней среды.
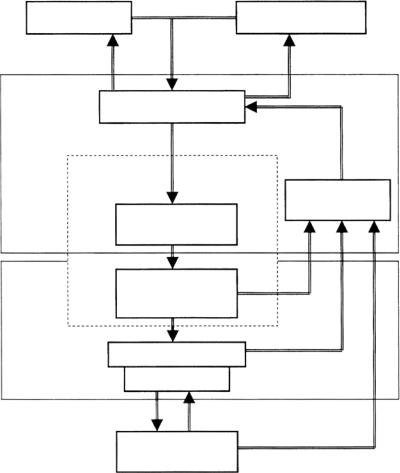
Частным случаем такой машины является интеллектуальная робототехническая система. Обобщенная структура мехатронной машины, в основу построения которой положена структура автоматических роботов, показана на рис. 2.2 [1].
Внешней средой для машин рассматриваемого класса является технологическая среда, которая содержит различное основное и вспомогательное оборудование, технологическую оснастку и объекты работ. Внешние среды укрупнено можно разделить на два основных класса:
детерминированные и недетерминированные. К детерминированным относятся среды, для которых параметры возмущающих воздействий и характеристики объектов работ могут быть заранее определены с необходимой точностью. Некоторые среды являются недетерминированными по своей природе, например, экстремальные подводные и подземные среды.
22
Человек-оператор |
Компьютер верхнего |
||
уровня управления |
|||
|
|
||
|
|
Цель движения |
|
Интеллектуальные |
Устройство компьютерного |
||
устройства |
|||
|
управления |
||
|
|
||
|
|
Сигналы управления приводами |
|
|
|
Блок приводов |
|
|
|
Информационное |
|
|
|
устройство |
|
|
Силовые электронные |
||
|
преобразователи |
||
|
Исполнительные |
||
|
|
двигатели |
|
Исполнительные |
Механическое устройство |
||
устройства |
|
|
|
|
|
Рабочий орган |
|
Функциональное |
Возмущающие |
||
|
движение |
воздействия |
|
|
|
Внешняя среда |
|
и объекты работ
Рис. 2.2. Обобщенная структура мехатронных машин
Характеристики технологических сред, как правило, могут быть определены с помощью аналитико-экспериментальных исследований и методов компьютерного моделирования. При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания для операций механообработки, контактные силы при сборке, реакция струи жидкости для гидравлической резки.
23
В состав мехатронной машины входят четыре основные части (рис. 2.2):
–механическое устройство, конечным звеном которого является
рабочий орган;
–блок приводов, включающий в себя силовые преобразователи
иисполнительные двигатели;
–устройство компьютерного управления, на вход которого поступают команды человека-оператора либо ЭВМ верхнего уровня управления;
–информационное устройство, предназначенное для получения
ипередачи в устройство компьютерного управления данных о реальном движении машины и о фактическом состоянии ее подсистем.
Механическое устройство и двигатели объединены в группу исполнительных устройств. В состав группы интеллектуальных устройств включены электронная, управляющая и информационная части машины.
Устройством компьютерного управления будем называть комплекс аппаратных и программных средств, вырабатывающий сигналы управления для блока приводов машины. В состав комплекса обычно входят задающие устройства (например, джойстики и рукоятки), пульт управления оператора, вычислительные и преобразующие устройства, периферийные устройства ввода-вывода информации.
Устройство компьютерного управления выполняет следующие основные функции:
1)управление функциональными движениями мехатронной машины в реальном масштабе времени;
2)координация управления механическим движением с сопутствующими внешними процессами;
3)взаимодействие с человеком-оператором через человеко-ма- шинный интерфейс в режимах программирования (режим off-line)
инепосредственно в процессе движения (режим on-line);
4)обмен данными с внешними устройствами (информационным устройством, блоком приводов, компьютером верхнего уровня, периферийными устройствами).
Информационное устройство предназначено для сбора и передачи в устройство управления информации о фактическом состоянии внешней среды и движущейся мехатронной машины.
Согласно представленной блок-схеме в информационном устройстве можно выделить три группы сенсоров:
24

1)датчики информации о состоянии внешней среды и объектов работ (системы технического зрения, локационные датчики и дальномеры и т. д.);
2)датчики информации о движении механической части (датчики перемещений, скоростей, ускорений, сил и моментов);
3)датчики обратной связи блока приводов (дают информацию
отекущих значениях электрических токов и напряжений в силовых преобразователях).
Механическое устройство мехатронной машины представляет собой многозвенный механизм, кинематическую цепь которого образуют движущиеся звенья, составляющие кинематические пары. Конечным звеном кинематической цепи является рабочий орган.
Рабочий орган мехатронной машины – это составная часть механического устройства для непосредственного выполнения технологических операций и / или вспомогательных переходов.
Примеры рабочих органов в робототехнике: механические схваты, вакуумные и электромагнитные захватные устройства, сварочные клещи (для точечной сварки), инструментальные головки для механообработки и лазерных операций, окрасочный пистолет. Таким образом, рабочий орган – это управляемый модуль, который может иметь несколько степеней подвижности и состоять из нескольких элементов, поэтому при его разработке также могут использоваться мехатронные принципы интеграции.
Далее необходимо заметить, что система интеллектуального управления машиной (комплекс верхнего уровня управления на рис. 2.2) в условиях неполной информации обычно реализуется в виде комплекса программных средств на компьютере верхнего уровня управления. При отсутствии такого комплекса ИММ превращается в интеллектуальный мехатронный модуль движения (ИММД). И, наконец, кратко определим две последние группы модулей мехатронных систем.
2.2.Основные направления развития мехатронных
иробототехнических систем
Основными квалификационными признаками, определяющими направление развития мехатронных и робототехнических систем, являются интеграция, интеллектуализация и миниатюризация (см. Лекция 1).
25