The UTIL.LIB Library • 343
Function manipulators
...
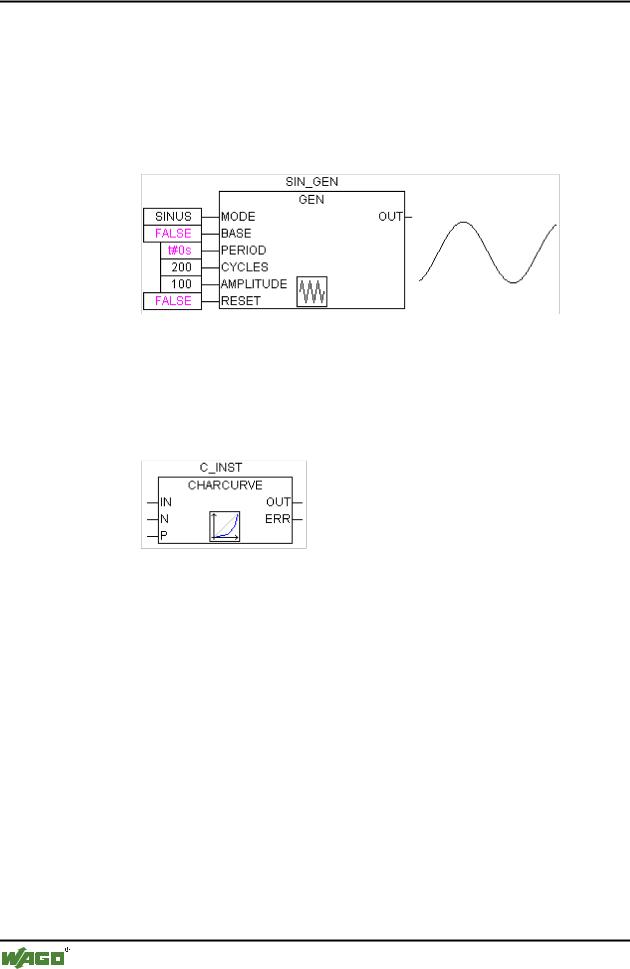
CHARACTERISTIC_LINE:CHARCURVE;
KL:ARRAY[0..10] OF POINT:= (X:=0,Y:=0), (X:=250,Y:=50), (X:=500,Y:=150), (X:=750,Y:=400), 7((X:=1000,Y:=1000));
COUNTER:INT;
...
END_VAR
Then we supply CHARCURVE with for example a constantly increasing value:
COUNTER:=COUNTER+10;
CHARACTERISTIC_LINE(IN:=COUNTER,N:=5,P:=KL);
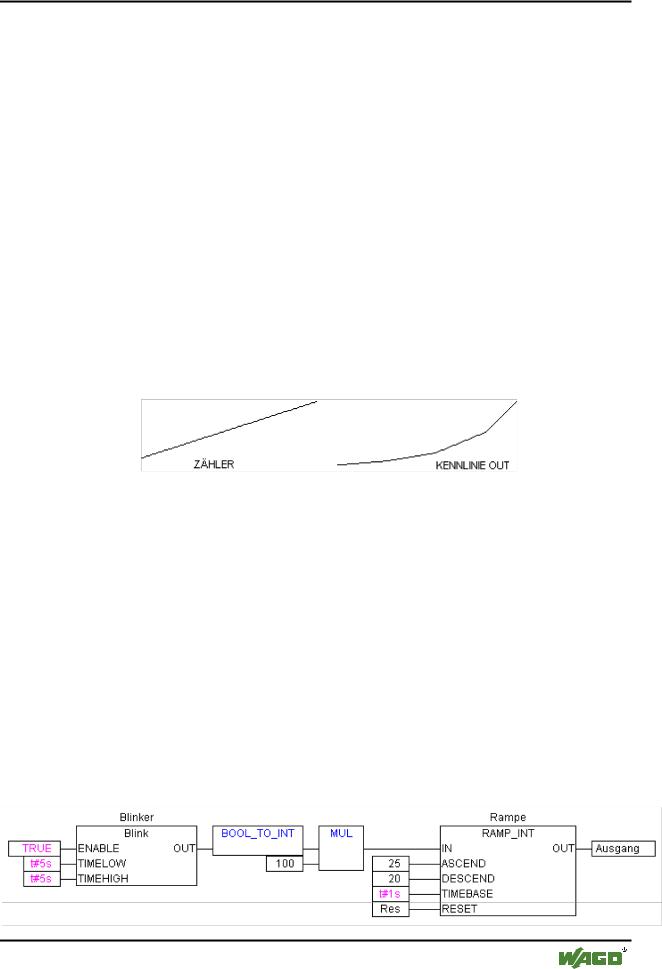
The subsequent tracing illustrates the effect:
14.7.2RAMP_INT
RAMP_INT serves to limit the ascendance or descendance of the function being fed:
The input consists on the one hand out of three INT values: IN, the function input, and ASCEND and DESCEND, the maximum increase or decrease for a given time interval, which is defined by TIMEBASE of the type TIME. Setting RESET to TRUE causes RAMP_INT to be initialised anew.
The output OUT of the type INT contains the ascend and descend limited function value.
When TIMEBASE is set to t#0s, ASCEND and DESCEND are not related to the time interval, but remain the same.
Example in CFC:
WAGO-I/O-SYSTEM 759 WAGO-I/O-PRO 32