Материал: лекция 6 ММОСУ
d f |
limlog N . |
(6.9) |
|
|
0 |
log |
|
Можно показать, что если множество есть точка, гладкая кривая или двумерная поверхность, то d f будет равна 0, 1 или 2 соответственно. Однако есть множества, у которых d f – дробная величина. Такие множества были названы Б. Мандельбротом фрактальными, или фракталами. Примерами фракталов являются странные аттракторы: для системы Лоренца d f 2.07, а для цепи Чуа d f 2.81. Доказано, что поведение траекторий на аттракторе,
имеющем фрактальную размерность d f может быть описано моделью в пространстве состояний с размерностью, не превышающей 2d f 1.
6.3. Зачем нужны хаотические модели?
Из предыдущего ясно, что хаотические модели следует использовать для описания непериодических колебательных процессов с непостоянными, меняющимися характеристиками (например, частотой и фазой) Существующие методы позволяют оценивать эти характеристики по результатам измерений. При этом такая величина как частота колебаний становится «нечеткой» и уступает место спектру, который является непрерывным. Вводятся новые важные величины: старший ляпуновский показатель (степень неустойчивости), характеризующий скорость разбегания траектории и, следовательно, время прогнозируемости процесса; фронтальная размерность, характеризующая «пористость» клубка траекторий. Важно, что известные хаотические модели имеют небольшое число параметров, а процессы в них обладают малой (несколько единиц) фрактальной размерностью. Это повышает надежность и прогнозирующую силу моделей. Перечислим некоторые из уже известных применений хаотических моделей.
Описание нерегулярного поведения реальных систем. На сегодняшний день известен целый ряд реальных физических устройств и процессов,
проявляющих при некоторых условиях хаотическое поведение. Приведем несколько примеров:
–газовые или полупроводниковые лазеры в так называемых многомодовых режимах;
–механические системы, состоящие из нескольких связанных осцилляторов (например, маятников), а также системы с ударами и люфтами;
–электронные схемы с активными элементами, например, полупроводниковыми приборами с отрицательным дифференциальным сопротивлением (такими как туннельные диоды, диоды Ганна и та.);
–химические и физико-химические реакции с нелинейной кинетикой;
–временные ряды в экономике и финансах (например, бизнес-циклы, цены на акции, обменные курсы валют. Заметим, что в экономических и финансовых приложениях хаотические модели в последнее время потеснили традиционные для этих областей стохастические модели.
Генерация нерегулярных сигналов. Во многих технических системах возникает необходимость использования псевдослучайных чисел и сигналов.
Вкачестве генераторов псевдослучайных чисел можно использовать хаотические системы.
Простейший подход к построению хаотических генераторов состоит в том, что берется динамическая система, описываемая одной из типовых хаотических моделей, и по внешнему виду траекторий выбирается та, в которой качественный характер колебаний наиболее близок к желаемому. После этого путем подбора параметров моделей устанавливаются желаемые качественные характеристики колебаний (амплитуда, спектр и т.д.). Использование характеристик хаотической динамики (показатели Ляпунова, фрактальные размерности и т.п.) позволяет задавать дополнительные свойства шумов и помех при их генерации. Заметим, что «на глаз» квазипериодические колебания с большим числом составляющих гармоник и хаотические колебания бывает трудно различить. В то же время, как и при моделировании нерегулярных процессов, малая размерность и малое число
параметров хаотических моделей дают им дополнительные преимущества перед линейными моделями с большим числом гармоник.
Синхронизация нерегулярных колебаний и управление ими. Двойственность природы хаотических систем (детерминированные системы с хаотическим поведением) приводит к новым неожиданным их применениям. Например, две хаотические системы можно заставить колебаться синхронно (в одной фазе), если подавать на одну или на обе системы сигнал обратной связи по ошибке рассогласования. Использование этого эффекта, например, в технике связи позволяет использовать хаотический несущий сигнал вместо периодического, что в свою очередь дает возможность повысить надежность и скрытность процесса передачи сообщений.
Поясним идею управляемой синхронизации для упрощенного случая, когда ведущая система (эталонный генератор) описывается уравнением
x f x , (6.10)
а ведомая (управляемый генератор) – уравнением
z f z u t , |
(6.11) |
где x, z, u – n-мерные векторы. Выбирая вектор обратной связи u t пропорциональным ошибке
|
|
|
u t Ke t , |
|
(6.12) |
где e x z – |
вектор |
ошибок, K 0 – коэффициент усиления, получим |
|||
уравнение ошибок: |
e f x t f x t e Ke |
|
|||
|
|
|
(6.13) |
||
|
|
|
|
|
|
в котором x t |
– заданная функция времени, являющаяся решением (3.76). |
||||
Если матрица |
Якоби |
A x f x ограничена в |
некоторой |
области Ω, |
|
|
|
|
x |
|
|
содержащей решение |
системы (6.10) – (6.12), то |
легко подобрать такое |
|||
K 0, |
чтобы собственные числа симметричной матрицы A x AT x 2K n |
||||
(где n |
– единичная n n-матрица) лежали левее мнимой оси при x . При |
||||
этом система (6.10) – (6 12) будет обладать свойством так называемой конвергентности в Ω: все ее траектории, лежащие в Ω, сходятся при t к
единственному ограниченному решению. Поскольку является решением (6.13) то к нему и сходятся все траектории. Таким образом, решения систем (6.10) и (6.11) неограниченно сближаются, что и означает синхронизацию двух систем. При этом поведение каждой из систем может быть хаотическим и оставаться таковым.
6.4 Линейные или нелинейные?
Часто методы теории нелинейных систем создаются путем аналогий с линейной теорией или сведением нелинейной задачи к линейной.
Построение нелинейной теории на «линейном» фундаменте порождается представлением о линейной системе как о простейшем классе систем, а о гармоническом сигнале как о простейшем виде сигналов.
Например, подход теории абсолютной устойчивости, развиваемый с середины ХХ века, основан на рассмотрении систем, разделенных на линейную и нелинейную части (такие модели часто называют системами Лурье, см. рис. 6.4), и выведении свойств полной системы из свойств частотной характеристики линейной части (ее реакции на гармонический сигнал) и свойств множества, где лежит график нелинейности. На таком подходе основаны и современные частотные методы нелинейного анализа. Аналогично в задачах синтеза приобрел популярность метод линеаризации обратной связью (“feedback linearization”), основанный на преобразовании модели нелинейной системы к линейной форме при помощи нелинейных замен координат и обратных связей с последующим применением хорошо разработанных методов синтеза линейных систем.
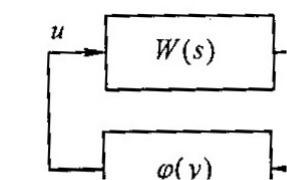
Рисунок 6.4 – Система Лурье В 80-е годы возникла новая идея: не опираться на анализ частотных
свойств линейной части модели, а развивать «частотную философию» для исходной нелинейной системы. Однако и этот подход имеет границы применимости: если на величину управляющих сигналов или на функции обратной связи наложены ограничения, то «частотная философия» и линеаризация теряют свою силу. Аналогично в присутствии нерегулярных колебаний гармонические сигналы перестают играть роль простейших сигналов а, применение частотных методов как средства анализа существенно усложняется.
Прежде всего необходимо найти адекватную замену частотной характеристике. Чтобы сделать это, сначала вернемся к классической задаче Лурье об абсолютной устойчивости системы, состоящей из линейной части, описываемой передаточной функцией
|
y W p u, |
(6.14) |
||||||
и статической нелинейности |
|
|||||||
u y , |
(6.15) |
|||||||
график которой лежит в симметричном секторе |
|
|||||||
|
y |
|
K |
|
y |
|
. |
(6.16) |
|
|
|
|
|||||
Неравенство (6.16) означает, что коэффициент усиления нелинейного |
||||||||
блока не превосходит K . Для устойчивости (6.14) – |
(6.16) достаточно |
|||||||
выполнения неравенства |
|
|||||||
|
KW K 1, |
(6.17) |
||||||