Материал: эскиз 2
После выполнения кинематических расчетов, расчетов передач, необходимо выбрать наилучшие параметры схемы будущего привода и разработать конструкторскую документацию. Конструкторская документация, по заданиям на выполнение Ваших проектов, включает в себя сборочный чертеж и 4-6 рабочих чертежей деталей.
Выполнение кинематических расчетов привода мы с вами достаточно подробно разобрали в классе, но если остались вопросы, то ответы на них вы можете найти в пособии П.Ф. Дунаева (высылал ранее) в главе 1. В этом пособии достаточно подробно описаны схемы приводов, теоретическая часть расчета, а также есть подробные примеры расчета и ссылки на необходимые справочные данные. Аналогичные примеры разобраны в пособии «Конструирование механических передач», которым мы пользовались в классе и которое я также отправлял старосте вашей группы.
Выполнение расчетов передач мы с вами также подробно разбирали в классе, ваш лектор выдал вам теоретическую часть этих расчетов. Если опять же остались вопросы, то ответы на них можно найти в учебнике П.Ф. Дунаева в главе 2. По аналогии с главой 1, также даны большие теоретические расчеты по каждому виду передач в отдельности. Дополнительно в пособии «Механические передачи», которыми мы пользовались в классе (также отправил старосте), есть достаточно подробные методические инструкции к проектировочному и проверочным расчетам передач. В обоих пособиях имеется большая справочная часть с необходимыми материалами и коэффициентами необходимыми для выполнения этих расчетов.
После выполнения проектировочных расчетов переходят к разработке технического проекта. Первым этапом проекта является – ЭСКИЗНЫЙ ПРОЕКТ. («Конструирование механических передач» глава 3). Эскизный проект выполняется на миллиметровой бумаге или с использованием CAD пакета в масштабе 1:1!
Эскизный проект необходим для того, чтобы определиться с окончательной формой будущих колес передачи, определения типа и положения подшипников, определения длин участков валов, формы корпуса и т.д.
Этапы выполнения эскизного проекта или последовательность вычерчивания подробно разобрана на примере двухступенчатого цилиндрического редуктора в пособии «конструирование механических передач» на стр.25 рис.3.3.
Порядок вычерчивания элементов передач может немного варьироваться в зависимости от расположения элементов передач, типа передачи, но в целом порядок работы практически не изменяется.
Ранее я вам высылал пример выполнения эскизного проекта одноступенчатого цилиндрического редуктора с горизонтальным расположением валов. Это самая простая и распространенная схема редуктора.
Сегодня для вас я выполнил кинематический и проектировочный расчет одноступенчатого цилиндрического редуктора с вертикальным, консольным расположением валов. Исходные данные и схему взял из ваших заданий.
Порядок вычерчивания опять же не отличается от приведенного в вышеуказанном пособии. В результате спроектировал редуктор (рисунок 1-3).
Особенности выполнения проекта по такой схеме заключаются в способе фиксации деталей на валах.
Узел быстроходного вала-шестерни выполнен в виде автономно устанавливаемого узла, собранного в своем «мини» - корпусе, который называется – СТАКАН. Использование стакана в данном проекте позволяет легко и быстро монтировать и демонтировать узел быстроходного вала с целью обслуживания подшипников этого узла, а также для инспектирования состояния зубчатого зацепления. Также подобная схема установки вала в опорах, так же, как и использование консольно расположенных колес, целесообразнее выполнять с закреплением подшипников в отдельных корпусах – стаканах.
Тихоходный узел выполнен аналогично, по тем же соображениям.
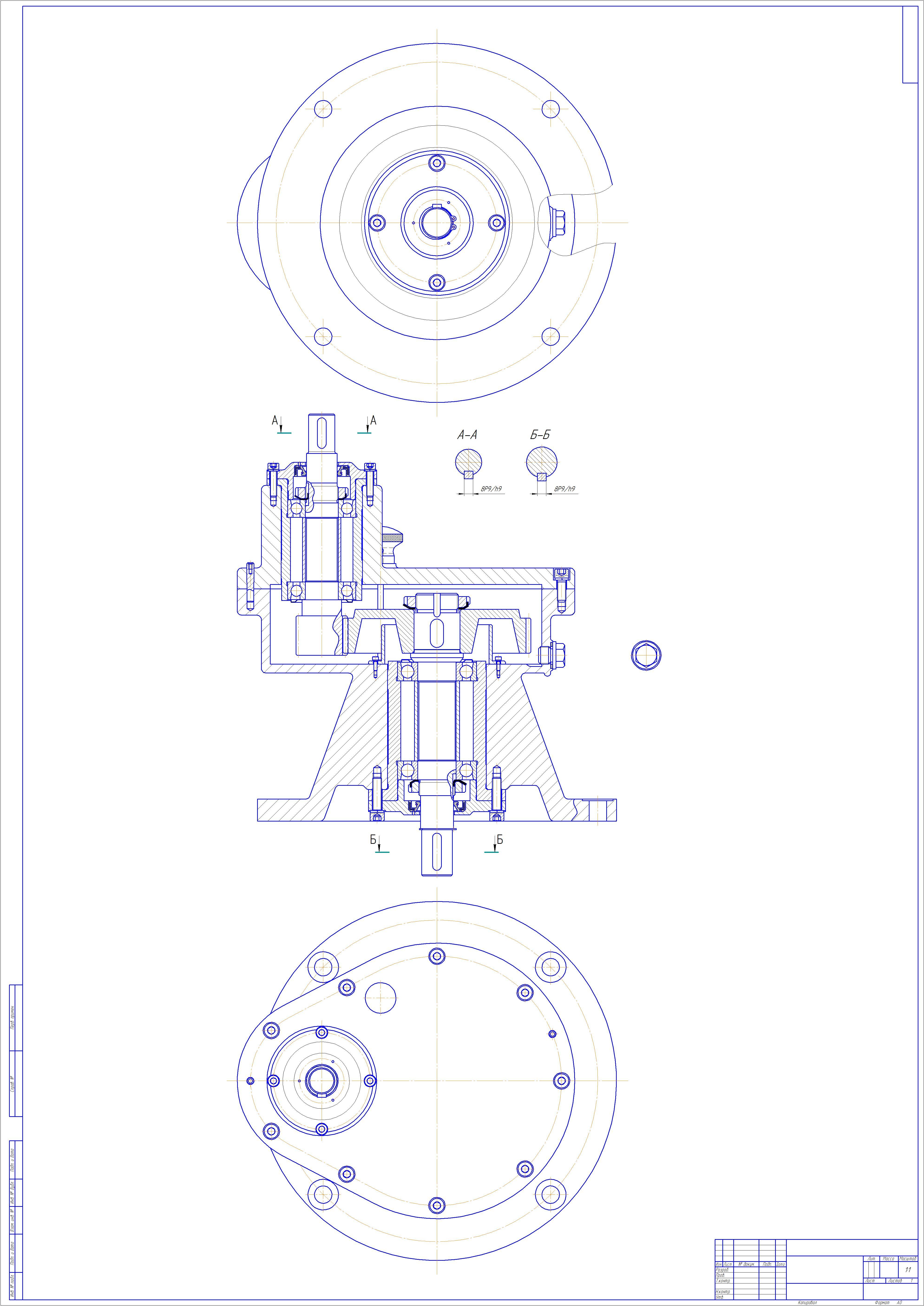
Рисунок 1 – Главный вид (фронтальный разрез по осям валов)
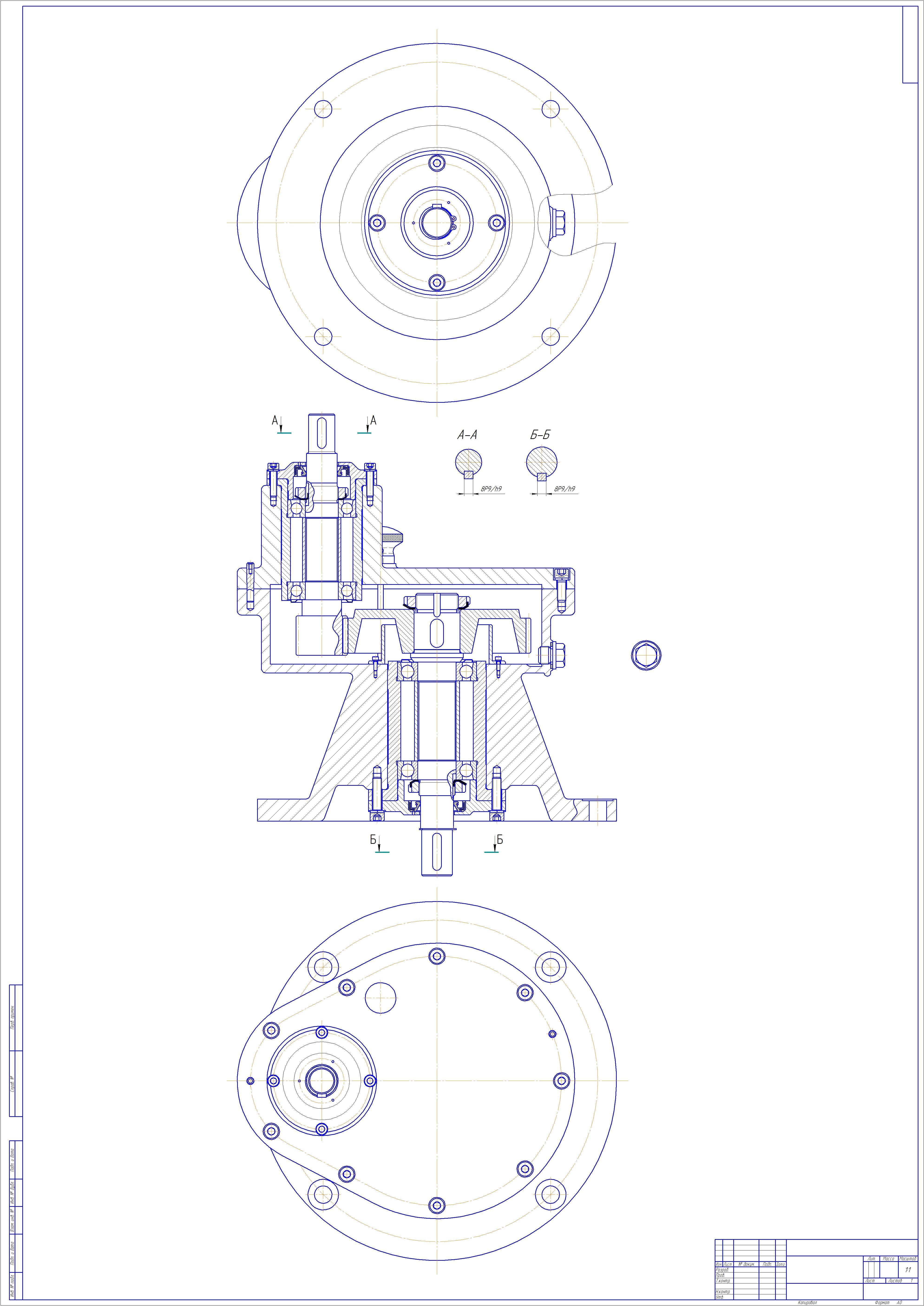
Рисунок 2 – Вид сверху.
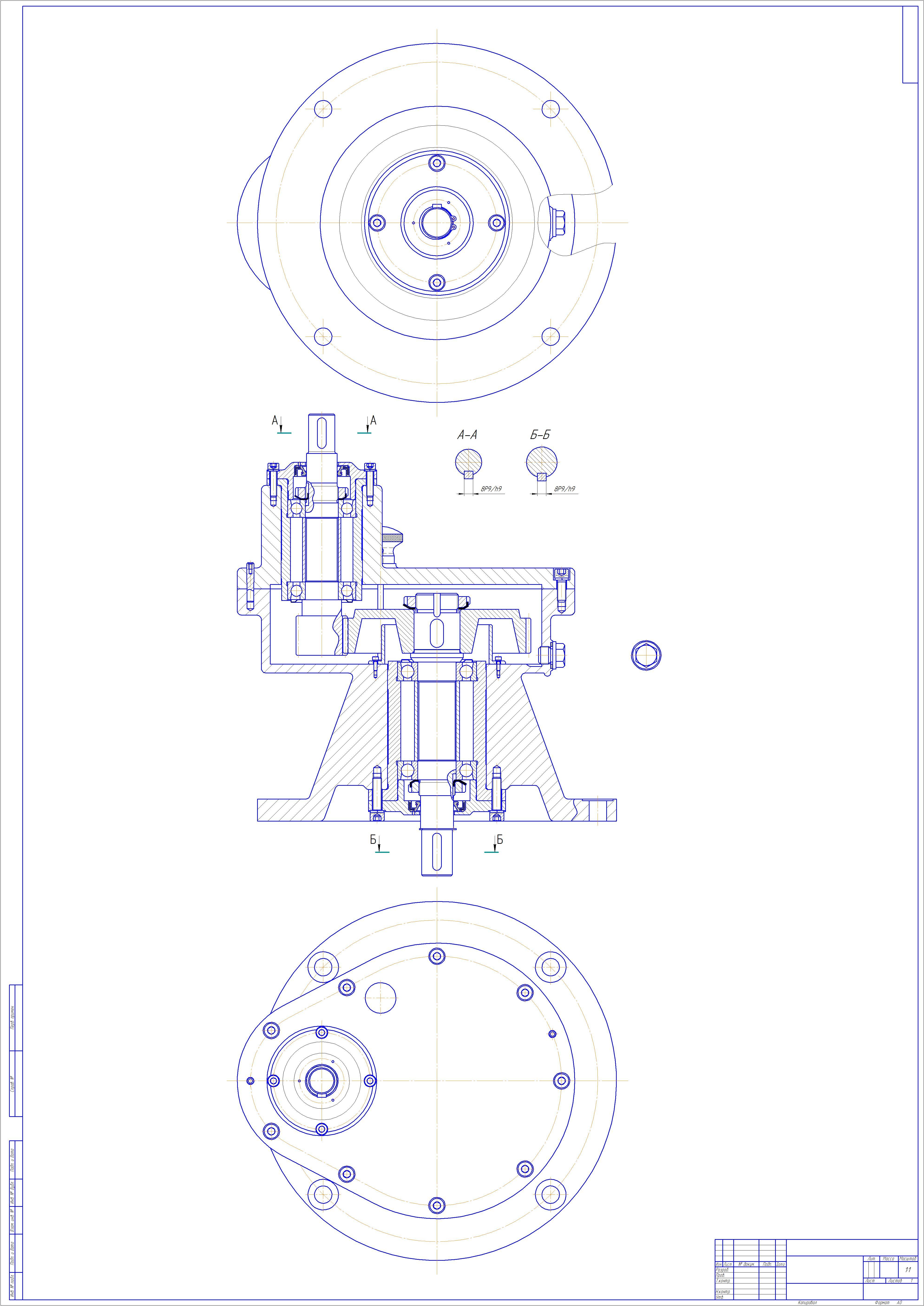
Рисунок 3 – Вид снизу (на монтажный (фундаментный) фланец).
Каплевидная форма корпуса выбрана из соображения экономичности и минимизации массы всей конструкции в целом. Базирование крышки корпуса относительно самого корпуса осуществляется двумя коническими штифтами.
Базирование крышки относительно корпуса необходимо для выполнения требования точности межосевого расстояния зубчатой передачи. Ввиду того, что шестерня установлена в крышке, а колесо в корпусе, то и их взаимное положение будет определяться относительным положением крышки корпуса относительно самого корпуса редуктора. Поэтому после расточки отверстий в литых заготовках крышки корпуса и самого корпуса эти детали обрабатываются по плоскости стыка, собираются, стягиваются друг с другом, контролируется расстояние между осями отверстий и только после этого изготавливаются отверстия для штифтов. Штифты в этом случае не позволят изменить положения крышки относительно корпуса при сборке редуктора и в процессе его технического обслуживания или ремонта.
Рассмотрим конструкцию быстроходного узла редуктора более подробно (рисунок 4).
Быстроходный вал 1 выполнен по схеме вал шестерня, т.к. шестерня имеет малый размер по отношению к соседнему участку вала и выполнять ее отдельной деталью нецелесообразно, как технологически, так и экономически. Вал установлен на радиально упорных подшипниках 3 и 6, т.к. передача косозубая (т.е. создает осевую нагрузку на подшипники в процессе работы), и сам вал расположен вертикально, что в свою очередь под действием силы тяжести также создает осевые нагрузки в опорах. Также вал установлен в опорах по схеме «в растяжку», т.к. при использовании выбранных подшипников в такой схеме легче регулировать усилие затяжки и осевой зазор в подшипниках. Расстояние между центрами подшипников в данной схеме принимается равным (2,5 – 3) dп и окончательно принимается по ряду нормальных чисел ГОСТ 6636-69. Также между опорами установлена дистанционная распорная втулка 5, для передачи усилия затяжки подшипников и обеспечения постоянства расстояния между ними. Постоянство положения вала обеспечено конструкцией стакана 4 (распорный буртик между наружными кольцами подшипников) и использованием крышки подшипников 10 с упором во внешнее кольцо подшипника 6. Регулирование положения деталей на валу и самого вала осуществляется использованием регулирующих прокладок, которые вкладываются между фланцем стакана и корпуса, либо между фланцами крышки и стакана, либо в обоих случаях одновременно.
Подшипники фиксируются на валу с помощью стандартной круглой гайки 8 (ГОСТ 11871-88).
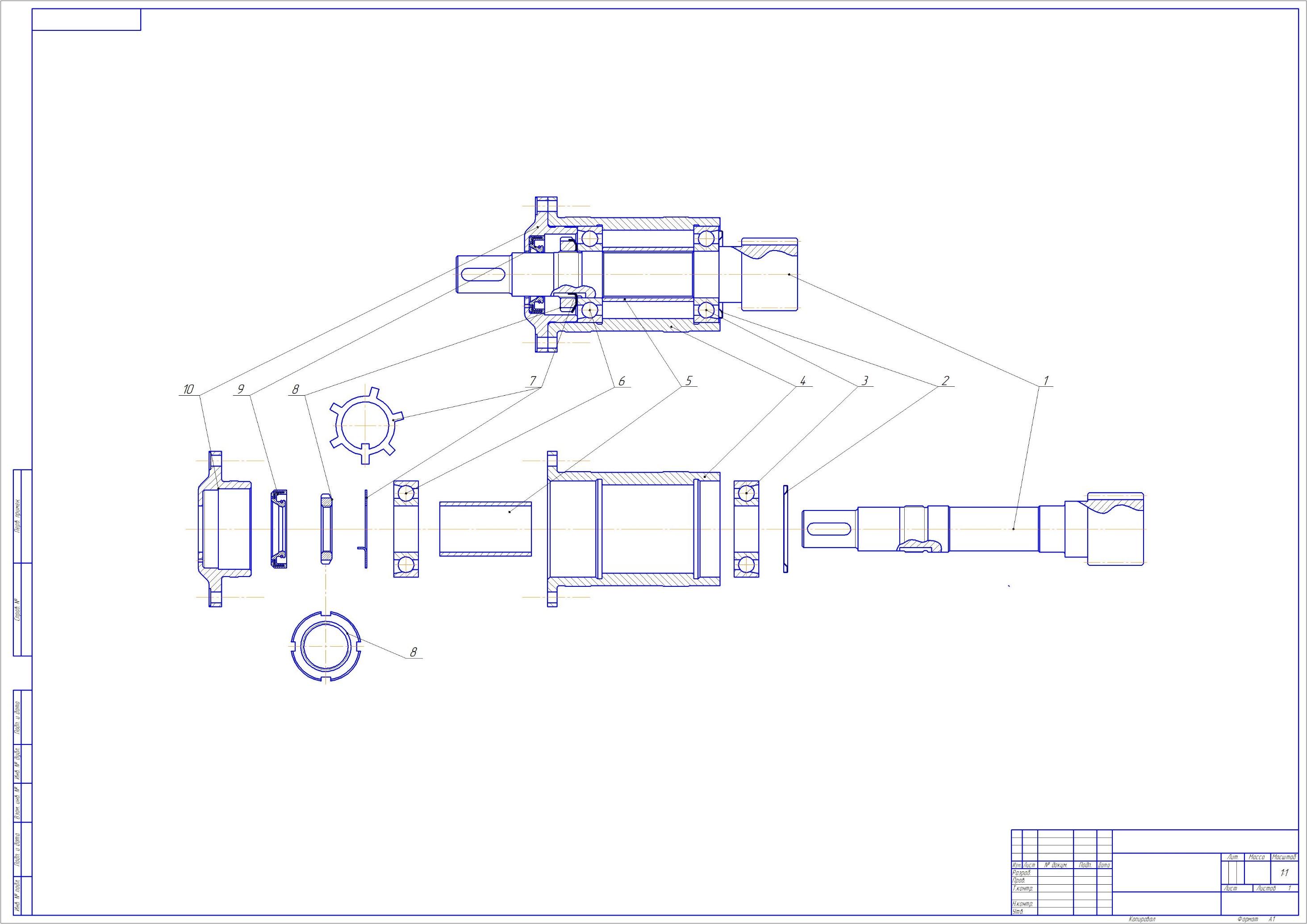
Рисунок 4 – Узел быстроходного вала.
Фиксация гайки от «раскручивания» обеспечивается использованием стандартной стопорной многолапчатой шайбы 7 (ГОСТ 11872-89).
Смазывание подшипников выполнено отдельной консистентной смазкой. Для удержания смазки внутри блока подшипников в нижней части узла установлена уплотнительная стальная шайба 2 (Табл. 24.25 учебник Дунаева стр. 429). Также эта шайба служит защитным экраном нижнего подшипника от продуктов износа переносимых вместе со смазкой из зоны зацепления передачи.
С другой стороны, в крышке подшипника имеется отверстие для выхода вала за пределы внутреннего объема корпуса, служащего для закрепления приводных (ведущих) деталей. Между выходным участком вала и стенкой отверстия в крышке корпуса должен быть обеспечен зазор необходимый для исключения контакта подвижной детали (вал) и неподвижной детали (крышка корпуса). В образовавшийся зазор внутрь корпуса, а точнее внутрь подшипниковой камеры может попадать пыль, которая перемешиваясь со смазкой подшипников будет работать как абразив и может привести к перегреву и повышенному износу опор. Следовательно, этот зазор необходимо герметизировать. С этой целью в качестве герметизации я выбрал стандартное манжетное уплотнение 9 (ГОСТ 8752-79), которое встроил в крышку подшипника. Такие типы уплотнений целесообразно использовать на валах с частотами вращения до 1500 об/мин.
Детали на рисунке 4 расположены в порядке сборки узла.
Вначале на вал 1 устанавливается уплотнительная шайба 2 и подшипник 3 скосом в сторону шестерни. После устанавливается стакан 4, распорная втулка 5 и второй подшипник 6 скосом от шестерни. Затем устанавливается шайба 7 внутренней лапкой в паз на валу и затягивается гайкой 8. Одна из внешних лапок шайбы 7 загибается в шлиц гайки 8 после ее затяжки. Следовательно, при попытке гайки самопроизвольно выкрутиться она стенкой шлица упрется в лапку шайбы, а шайба в свою очередь зацепится внутренней лапкой за стенку паза на валу. После в крышку подшипника 10 устанавливается манжетное уплотнение 9, и крышка с уплотнением устанавливается в стакан. В итоге узел быстроходного вала устанавливается в корпус и фиксируется на нем с помощью винтов.
Конструкции всех вышеуказанных элементов, а также условия их использования вы можете найти в соответствующих разделах учебника Дунаева или в других пособиях по курсу Детали машин и основы конструирования.
Аналогичным образом был сконструирован узел тихоходного вала рисунок 5. Единственное отличие этого узла от предыдущего в том, что колесо выполнено съемным. Осевая фиксация колеса осуществляется с помощью круглой шлицевой гайки 1 и многолапчатой стопорной шайбы 2.
Порядок сборки узла аналогичен предыдущему узлу, но вначале на вал устанавливается и фиксируется колесо 3. После устанавливается уплотнительная шайба 5, подшипник 6 скосом к колесу и дистанционная втулка 8. Затем в стакан 7 устанавливается подшипник 9 скосом от колеса и стакан с подшипником устанавливается в корпус. После чего в стакан устанавливается вал и фиксируется с помощью гайки 11 и стопорной шайбы 9. Дальше в крышку подшипника 13 устанавливается манжетное уплотнение 12 и крышка фиксируется в корпусе с помощью винтов через стакан. Из-за небольшого переходного размера выходного конца вала, было установлено упорное кольцо 12 (ГОСТ 13942-86) в качестве упорного буртика.
Регулирование положения колеса и осевого зазора в подшипниках осуществляется аналогично узлу быстроходного вала.
Приведенный пример соответствует практически полностью выполненному сборочному чертежу редуктора. Но перед тем как настолько подробно выполнять чертеж необходимо убедиться в правильности выбора некоторых элементов конструкции.
В частности, выполнить проверочный расчет подшипников и определить коэффициент запаса прочности тихоходного вала (как самого нагруженного вала в этой конструкции).
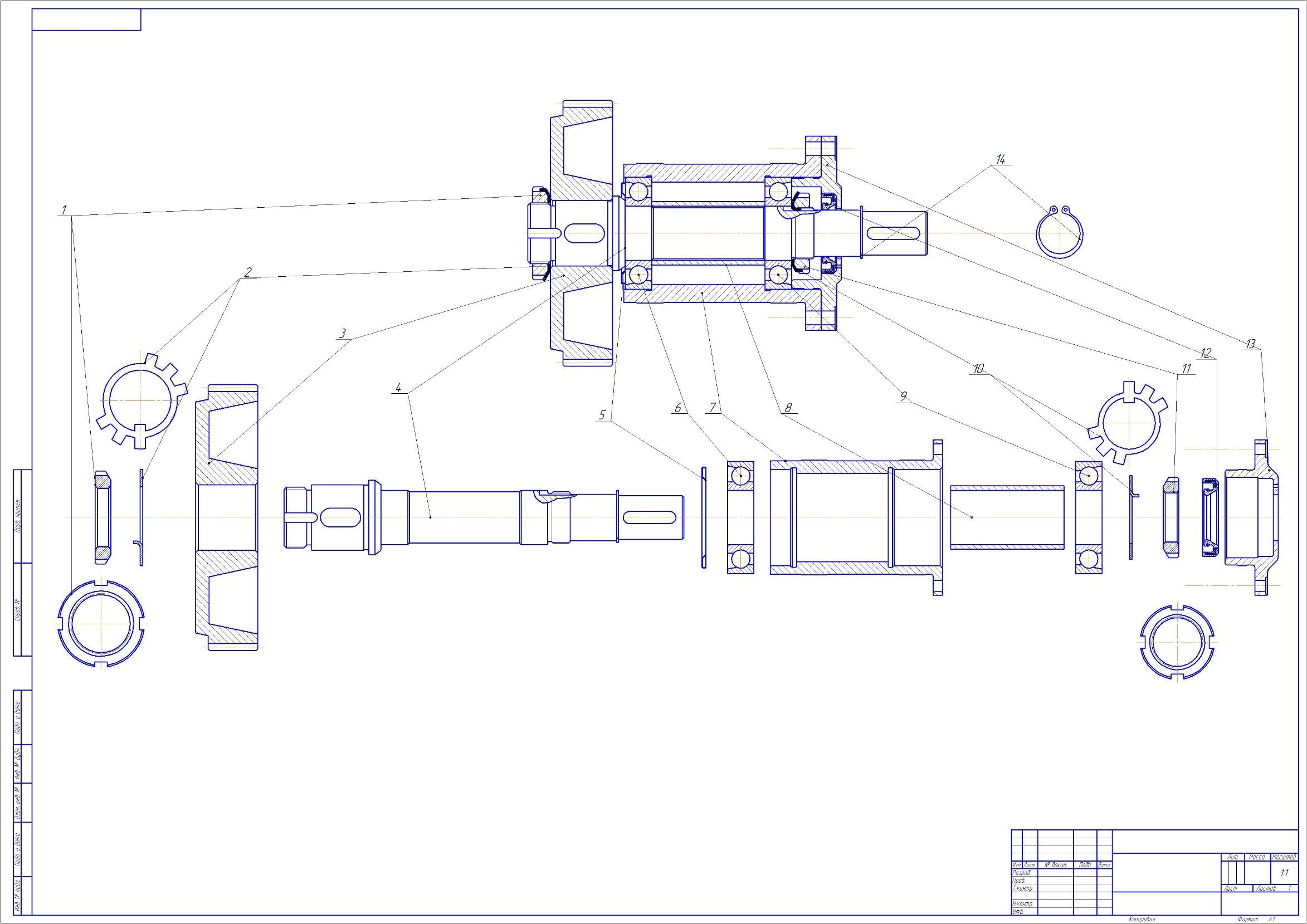
Рисунок 5 – Узел тихоходного вала.
Предварительно, на этапе эскизного проектирования вами были выбраны тип и схема установки подшипников. Как вы помните подшипники качения, как стандартные узлы, при одинаковых посадочных размерах имеют различные серии диаметров, а, следовательно, и различные грузоподъемности. Таким образом подшипники с одинаковым размером отверстия внутреннего кольца, но различных серий при одинаковом нагружении будут иметь различные сроки службы. А срок службы деталей привода или деталей узла привода должен быть примерно одинаковый. Поэтому срок службы, указанный у вас в заданиях, является тем минимумом, который должны отрабатывать все детали проектируемых вами устройств.
Расчет подшипников качения достаточно подробно описан в учебнике Дунаева в главе 7 (параграфы 7.1 и 7.2) там же приведено несколько примеров расчета. На что стоит обратить внимание. Перед тем как посчитать нагрузку, которую будет испытывать опора, необходимо составить расчетную схему соответствующего вала рисунок 6. Нагрузка в опорах создается внешними силами, приложенными к рассчитываемому узлу. В нашем случае это силы, создаваемые непосредственно зубчатым зацеплением (Ft, Fr, Fa), и сила на выходном участке вала. Сила на выходном участке создается тем элементом конструкции, который в последствии на нем будет установлен. В нашем случае мы пока не знаем, что это за элемент, какие он будет иметь размеры, а, следовательно, какие усилия он будет создавать, поэтому на этом этапе ограничимся ожидаемым консольным усилием Fk рассчитываемым по принципу многоцелевого редуктора.
Для расчета долговечности работы подшипников необходимо рассчитать суммарные радиальные – FR и осевые реакции - FA в опорах.
Суммарные радиальные реакции рассчитываются как векторная сумма радиальных реакций, действующих в горизонтальной и вертикальной плоскостях. На расчетной схеме в месте установки подшипников указаны четыре радиальные усилия X1, X2, Y1, Y2 – они же радиальные реакции в опорах.
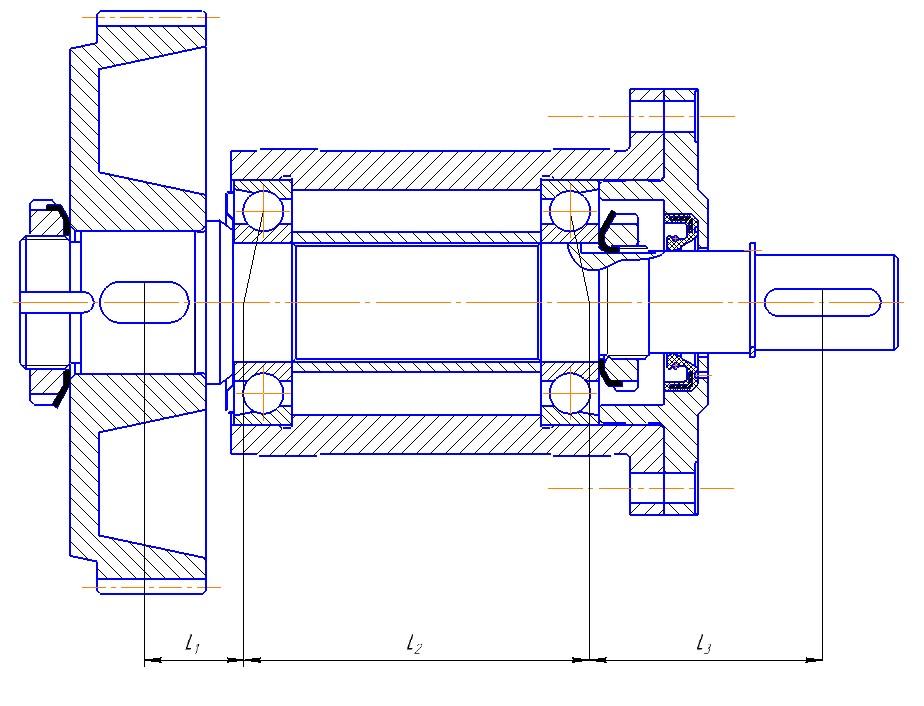
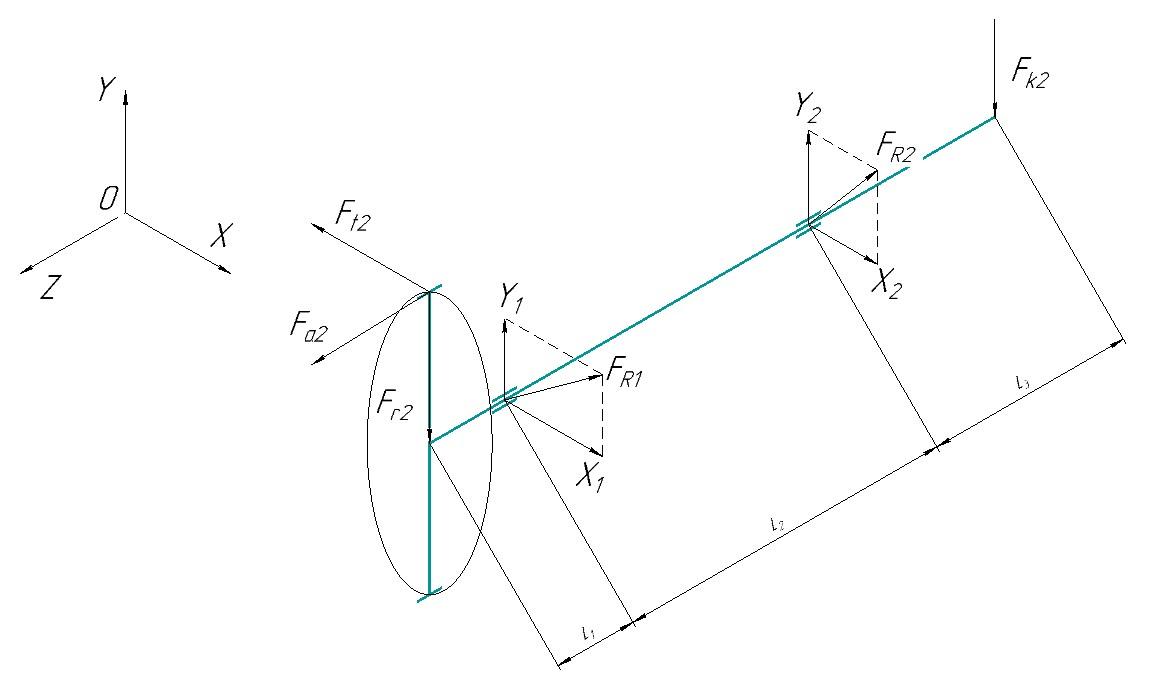
Рисунок 6 – Узел тихоходной ступени редуктора и расчетная схема узла.
Суммарные
радиальные реакции в опорах рассчитываются
как FR1,2= ,
индексы 1 и 2 для первой и второй опоры
соответственно. Расстояние между точками
приложения усилий (L1,
L2,
L3)
измеряются с ВЫЧЕРЧЕННОГО ЭСКИЗА.
Конкретнее, усилия зацепления передаются
на вал в месте закрепления колеса и
концентрируются в точку где и происходит
их передача от детали к детали. В этом
примере колесо соединено с валом с
помощью шпоночного соединения, поэтому
точка приложения сил располагается по
середине шпонки, как звена передачи
усилий. На концевом участке вала ситуация
аналогичная и точка приложения усилий
также расположена по середине шпонки.
,
индексы 1 и 2 для первой и второй опоры
соответственно. Расстояние между точками
приложения усилий (L1,
L2,
L3)
измеряются с ВЫЧЕРЧЕННОГО ЭСКИЗА.
Конкретнее, усилия зацепления передаются
на вал в месте закрепления колеса и
концентрируются в точку где и происходит
их передача от детали к детали. В этом
примере колесо соединено с валом с
помощью шпоночного соединения, поэтому
точка приложения сил располагается по
середине шпонки, как звена передачи
усилий. На концевом участке вала ситуация
аналогичная и точка приложения усилий
также расположена по середине шпонки.
Точка приложения сил под опорами не всегда находится по середине опоры. В этом примере на рисунке 6 тонкими линиями от подшипника к валу отмечены расположения этих точек. Угол наклона и направления этих линий зависят от типа и схемы установки подшипников (тема также хорошо раскрыта в учебнике Дунаева в главе 7).
Суммарные осевые реакции в опорах рассчитываются как алгебраическая сумма осевых сил, приложенных к этим опорам (в данном примере единственное внешнее осевое усилие от зацепления), и осевых сил, возникающих в самих подшипниках под действием радиальных реакций. Тема также подробно раскрыта в учебнике Дунаева глава 7.
Для определения X1, X2, Y1, Y2 воспользуемся знаниями, полученными в курсе «Сопротивления материалов», а конкретнее запишем необходимые уравнения равновесия. Для упрощения составления этих уравнений разобьем расчётную схему (рисунок 6) на две плоские схемы (рисунки 7 и 8).
Горизонтальные составляющие X1, X2 (рисунок 7) созданы исключительно окружным усилием из зацепления и для их расчёта Вам необходимо составить два уравнения равновесия относительно каждой из опор. А конкретнее составить уравнения сумм изгибающих моментов относительно опоры 1 и опоры 2. Сумма моментов относительно каждой опоры должна быть равна 0.
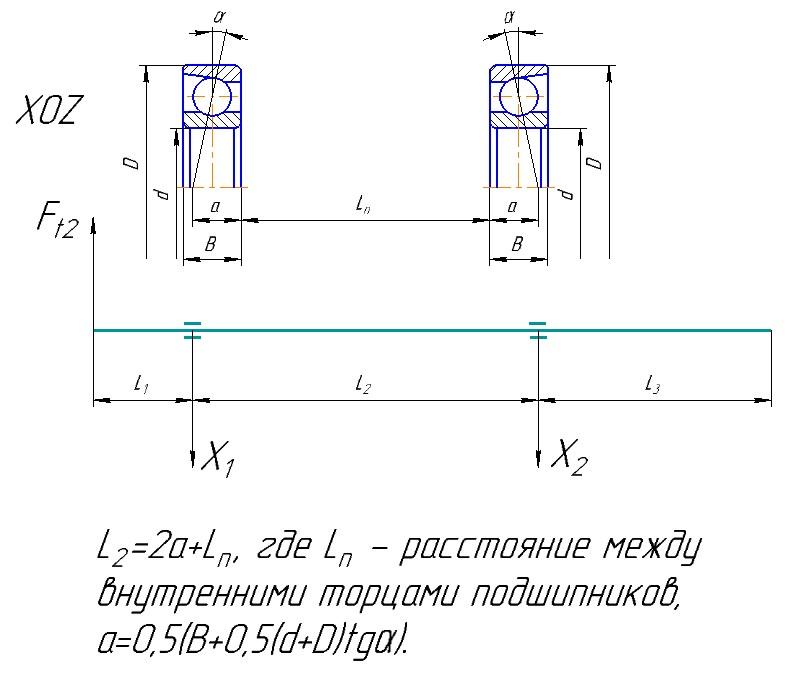
Рисунок 7 – Горизонтальная проекция расчетной схемы (XOZ).
Для определения вертикальных составляющих Y1, Y2, созданных радиальной и осевой силой из зацепления и консольной нагрузкой на концевом участке вала, также необходимо составить два уравнения равновесия, а точнее уравнения сумм изгибающих моментов, которые также должны быть равны 0.
После определения горизонтальных и вертикальных составляющих радиальных реакций в опорах, необходимо посчитать суммарные радиальные реакции и выбрать наиболее нагруженную опору. Т.к. в нашем примере использованы одинаковые подшипники (на расчетном валу), то делается простой вывод: ЕСЛИ НАИБОЛЕЕ НАГРУЖЕННАЯ ОПОРА ОТРАБАТЫВАЕТ УСТАНОВЛЕННЫЙ СРОК СЛУЖБЫ, ТО МЕНЕЕ НАГРУЖЕННАЯ ОПОРА ТОЧНО ЕГО ОТРАБАТЫВАЕТ.
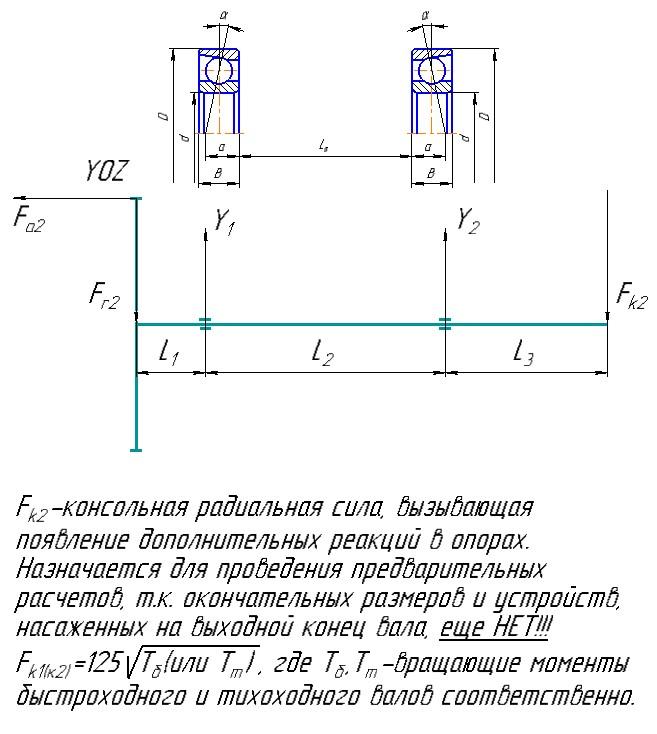
Рисунок 8 – Вертикальная проекция расчетной схемы (YOZ)
Наиболее нагруженная опора определяется по наибольшему значению суммарной радиальной реакции. Собственно, ее значение и будет использоваться в дальнейших расчетах.
После определения наиболее нагруженной опоры необходимо определить коэффициенты нагружения опоры – е, Х, Y. Эти коэффициенты определяются по отношению суммарной осевой к суммарной радиальной нагрузкам и используются в расчете ЭКВИВАЛЕНТНОЙ ДИНАМИЧЕСКОЙ НАГРУЗКИ в опоре (см. учебник Дунаева). Помимо реакций в опорах, коэффициенты е, Х, Y зависят от типа подшипника.
В итоге по полученной эквивалентной динамической нагрузке определяется искомая долговечность подшипников в миллионах оборотов и пересчитывается в часы. С учетом запаса на отказ подшипника, его расчетная долговечность должна быть больше установленной не меньше чем на 10%, но, с другой стороны, не должна сильно отличаться от установленной. Условно разница между расчетной и требуемой долговечностью должна укладываться в интервал 10%-20%.
Если в результате расчета расчетная долговечность получается много больше требуемой, то, возможно, лучше использовать подшипники скольжения (будет следующее сообщение).