Материал: Движение математического маятника
Интегралы (A), (B) и (C) также называются эллиптическими интегралами 1-го,2-го и 3-го рода - в форме Лежандра.
5§. Закон движения маятника (в эллиптических функциях)
![]()
![]() (5)
(5)
общее решения уравнения в явном виде.
Видно, что квадратура в конечном виде не берётся: интеграл справа
непосредственно приводится к эллиптическому интегралу 1го рода.
Так как ![]()
![]() ,
, ![]()
![]() ,
,
то ![]()
![]()
Подставляя этот результат в уравнение (5), получаем:
и положив ![]()
![]() =κ (0< κ<1), введём новую переменную интегрирования φ
=κ (0< κ<1), введём новую переменную интегрирования φ
по формулам ![]()
![]() ,
, ![]()
![]() ; (6)
; (6)
откуда ![]()
![]()
Кроме того,
![]()
![]()
при этом изменению θ от 0 до α отвечает изменение φ от 0 до π/2. Тогда получим закон движения маятника в
виде
![]()
![]() (7)
(7)
Интеграл, стоящий в правой части равенства (7), представляет собой эллиптический интеграл первого рода. Величина κ называется модулем эллиптического интеграла.
Так как по первой из формул (6) легко выразить φ через θ, то зависимость t от θ можно считать установленной.
Этот интеграл есть функция верхнего предела и модуля. Желая
выразить, наоборот, θ через t, мы нуждаемся в
обращении эллиптического интеграла
![]()
![]() (8)
(8)
Если в равенстве (8) рассматривать верхний предел, а как функцию
от интеграла u, монотонно возрастающую непрерывную (и
даже дифференцируемую) функцию от φ в промежутке (-![]()
![]() ; то такая функция носит название амплитуды u (am u) - как её обозначил Якоби - и обозначается так:
; то такая функция носит название амплитуды u (am u) - как её обозначил Якоби - и обозначается так: ![]()
![]() , или
, или ![]()
![]() . (9)
. (9)
А мы обозначим так: ![]()
![]() , то
, то ![]()
![]() , или
, или ![]()
![]() .
.
Из (8) теперь ясно, что ![]()
![]() и, значит,
и, значит, ![]()
![]() .
.
Беря от обеих частей равенства (9) синус, мы получим:
![]()
![]() (10)
(10)
Функция sn u представляет собой так называемую эллиптическую функцию
Якоби. Поскольку, согласно уравнению (7), u=t, то, переходя в равенстве (10) с помощью
формулы (6), найдём закон движения маятника, выраженный через эллиптическую
функцию sn, в виде
![]()
![]() . (11)
. (11)
6§. Графики траекторий движения маятника
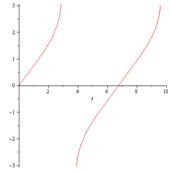
Построим численно кривые движения математического маятника при
различных начальных условиях используя закон движения маятника, выраженный
через эллиптическую функцию ![]()
![]() . Задавая угол
. Задавая угол ![]()
![]() и промежуток времени, мы строим графики зависимости
и промежуток времени, мы строим графики зависимости ![]()
![]() (
(![]()
![]() ). Возьмём
). Возьмём ![]()
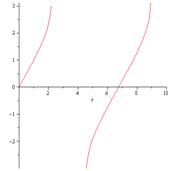
![]() =Pi/4 и для точности определения зависимости
=Pi/4 и для точности определения зависимости ![]()
![]() (
(![]()
![]() ) возьмём t1=0.10, t2=0.20, t3=0.30. При
) возьмём t1=0.10, t2=0.20, t3=0.30. При ![]()
![]() =5 - >
=5 - > ![]()
![]() (
(![]()
![]() ) = - 1,2;
) = - 1,2; ![]()
![]() =15 - >
=15 - > ![]()
![]() (
(![]()
![]() ) =1,2 Замечаем, что через каждые 10с, повторяется угол
отклонения.
) =1,2 Замечаем, что через каждые 10с, повторяется угол
отклонения.
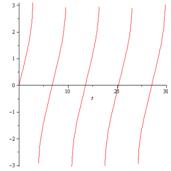
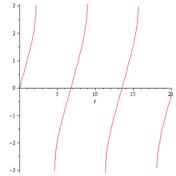
Возьмём ![]()
![]() =Pi/3 и для точности определения зависимости
=Pi/3 и для точности определения зависимости ![]()
![]() (
(![]()
![]() ) возьмём t1=0.10, t2=0.20, t3=0.30.
) возьмём t1=0.10, t2=0.20, t3=0.30.
При ![]()
![]() =5 - >
=5 - > ![]()
![]() (
(![]()
![]() ) = - 1,84;
) = - 1,84; ![]()
![]() =8,44 - >
=8,44 - > ![]()
![]() (
(![]()
![]() ) =1,86 Замечаем, что через почти каждые 3,5с, повторяется угол
отклонения.
) =1,86 Замечаем, что через почти каждые 3,5с, повторяется угол
отклонения.
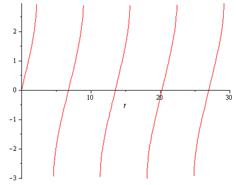
Таким образом, мы видим, что движение маятника периодическое. За 1
период при увеличении времени угол сначала увеличивается, а потом уменьшается.
7§. Заключение
В данной работе мы выполнили поставленные задачи и достигли
заданной цели. Мы познакомились с такими понятиями, как "математический
маятник", "эллиптическая функция" и "эллиптический
интеграл"… Отметили, как численно строить соответствующие кривые движения
при различных начальных условиях.
8§. Список литературы
1. Беляева Н.А. Обыкновенные дифференциальные уравнения Сыктывкар, 2012
. Боровой А., Херувимов А. Колебания и маятники. Ж. Квант. № 8, 1981.
. Бухгольц Н.Н. Основной курс теоретической механики. М.: Наука. 1969.
. Фихтенгольц Г.М. Курс дифференциального и интегрального исчисления 2 том М.: Наука. 1969.