Материал: Датчик регистрации пересечения створа ворот футбольным мячом
(b) - оптическая система, которая соединяет эмиттер и приемник посредством светового луча.
(c) - приемник для детектирования излучения, который преобразовывает полученную световую энергию в электронный сигнал.
(d) - демодулятор-усилитель, который извлекает и усиливает часть сигнала от модулированного источника излучения.
(e) - компаратор для сравнения полученного сигнала с порогом срабатывания датчика.
(f) - выходной каскад на транзисторе или реле для включения внешней нагрузки.
Самый простой и знакомый всем нам пример
использования таких датчиков - это автоматически открывающиеся двери
супермаркетов. (рисунок 6)
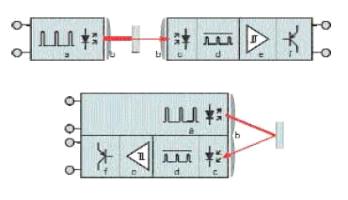
Рисунок 6 - Пример использования
фотоэлектрического датчика
1.2.1 Типы датчиков по методу сканирования
Принцип сканирования - это метод, используемый фотоэлектрическим датчиком для детектирования целевых объектов.
Выбор датчика с определенным принципом
сканирования, в первую очередь, зависит от физических особенностей измеряемых
объектов. Одни из них могут быть прозрачными, другие - с повышенными
отражающими способностями. Иногда возникает необходимость определить разницу в
цвете объектов. Расстояние сканирования - также немаловажный фактор при выборе
датчика определенного типа, поскольку некоторые типы имеют большой диапазон
сканирования, в то время как другие лучше работают на небольших расстояниях.
1.2.2 Датчики прямого
луча
![]()
![]()
![]()
Наиболее подходящими для нашей задачи являются
датчики прямого луча. Такие датчики состоят из двух устройств: излучателя и
приемника, которые располагаются таким образом, чтобы максимальный объем
излучаемого света попадал на приемник. При этом целевой объект должен
находиться на одном уровне с лучом. Когда объект перекрывает луч, изменяется
выходной статус приемника. Когда объект выходит за пределы луча, выходной
статус сигнала приемника возвращается в нормальное состояние. Датчики на
прерывание луча удобны для детектирования непрозрачных или отражающих объектов,
однако их нельзя использовать для обнаружения прозрачных предметов. Кроме того,
вибрация может нарушить центровку излучателя на приемник. В целом же, высокий
коэффициент усиления разнесенных в разные корпуса фотоэлектрических приемников
и излучателей позволяет использовать их в условиях высокой загрязненности
окружающей среды. Максимальный рабочий диапазон таких датчиков составляет 350
метров.


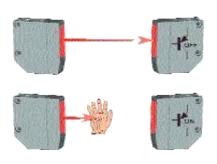
Рисунок 7 - Датчики прямого луча
Эффективный световой пучок датчиков - это
диаметр луча в том месте, где он пересекается с целевым объектом. Для датчиков
с прерыванием луча это диаметр линзы излучатели и приемника, поэтому размер
минимального целевого объекта должен быть равен диаметру линзы.
1.2.3 Датчики
отраженного луча
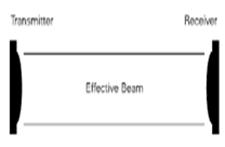
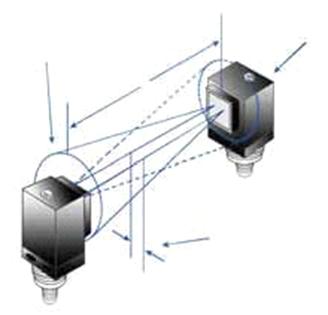
Рисунок 8 - Датчики отраженного луча
Такие датчики содержат в одном корпусе и излучатель, и приемник. Световой пучок посылается эмиттером на рефлектор (отражатель специальной конструкции), а затем возвращается отраженным в приемник. Когда целевой объект блокирует световой поток между датчиком и рефлектором, изменяется выходное состояние датчика. При исчезновении преграды датчик возвращается в нормальное состояние. Максимальный диапазон измерений для таких датчиков составляет 55 метров.
Эффективный диапазон излучения рефлекторных
датчиков находится от линзы излучателя до границы рефлектора. Минимальный
размер целевого объекта должен равняться размеру используемого рефлектора.

Рисунок 9 - Схема датчика отраженного луча
Как правило, рефлекторы заказываются отдельно от
датчиков. Они бывают различной формы, круглые или прямоугольные. Диапазон
измерений датчиков с рефлекторами указывается при использовании конкретной
модели рефлектора. Отражающие наклейки не рекомендуется использовать с
поляризованными датчиками.

Рисунок 10 - Рефлектор
Призматические рефлекторы отражают внешний свет
параллельно, при этом коэффициент его отражения выше, чем у любого объекта под
углом более 15 градусов. Обычно, рабочее расстояние увеличивается
пропорционально размерам отражателя. Рефлектор может изменять плоскость
поляризации внешнего освещения на 90 градусов.
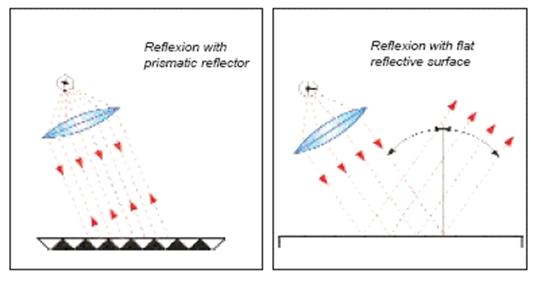
Рисунок 11 - Отражение от призматического
рефлектора. Отражение от ровной отражающей поверхности
Датчики с отражателями могут оказаться плохими
помощниками при детектировании блестящих предметов, которые будут отражать свет
от собственной поверхности. Датчик же при этом будет не в состоянии определить
от какого предмета отражается луч, от рефлектора или попавшего в луч целевого
объекта.
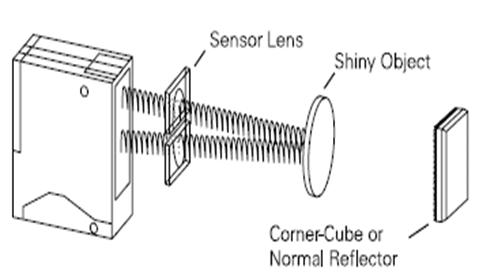
Sensor Lens - линза датчика, Shiny Object - блестящий предмет, Corner-Cube or normal reflector - рефлектор.
Рисунок 12 - Принцип работы датчика
Поэтому для работы с бликующими предметами используются специальные поляризационные фильтры. Они размещаются перед линзой излучателя и приемника и принимают световой пучок только в одной плоскости. В датчиках с поляризованным отражателем излучение света поляризовано в вертикальной плоскости, в то время как прием излучения происходит через поляризованный фильтр в горизонтальной плоскости. Призматический отражатель изменяет световую плоскость под углом 90 градусов, а свет, отражаемый от других объектов, сохраняет свою плоскость излучения и блокируется входным фильтром приемника.
Такой свет называется поляризованным. С такими
датчиками используется угловой кубический рефлектор. Поляризованный фильтр на
приемнике пропускает только отраженный от рефлектора свет.
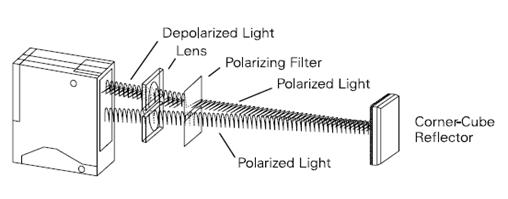 light -
деполяризованный свет, Lens - линза, Polarizin filter - светофильтр, Polarized
light - поляризованный свет, Corner-Cube
or normal
reflector - рефлектор
light -
деполяризованный свет, Lens - линза, Polarizin filter - светофильтр, Polarized
light - поляризованный свет, Corner-Cube
or normal
reflector - рефлектор
Отдельные модификации датчиков выпускаются для
работы со стеклянными предметами. Такие датчики очень чувствительны к даже
небольшой разнице между исходящим и входящим сигналом.
1.2.4 Датчики рассеянного луча
В диффузионных датчиках излучатель и приемник
расположены также в одном корпусе. Свет, исходящий из эмиттера, достигает
целевого объекта и отражается от его поверхности под разными углами. Если
приемник получает достаточное количество отраженного света, датчик изменит свое
выходное состояние, другими словами, сработает. Если отраженный свет не
возвращается в приемник, выходной сигнал останется в неизменном состоянии.
Такие датчики представляют наиболее экономичное и легко монтируемое решение (их
стоимость ниже стоимости других фотоэлектрических приборов). В датчиках подобной
конструкции эмиттер размещен перпендикулярно плоскости целевого объекта, а
приемник установлен под некоторым углом для фиксации рассеянного
излучения.(Рис.13) Очевидно, что до приемника доходит лишь малая доля света,
поэтому максимальный рабочий диапазон таких датчиков составляет 4 метра. Обычно
диффузионные датчики работают в режиме срабатывания на светлое: датчик
срабатывает при пересечении луча объектом.
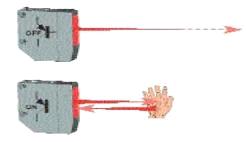
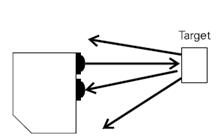
Рисунок 14 - Рассеивающий датчик
Максимальный рабочий диапазон указывается при работе датчика на матовом белом фоне. В зависимости от характера поверхности целевого объекта применяются особые корректирующие коэффициенты:
Матовая белая поверхность 100%
Белая бумага 80%
Серый ПВХ 57%
Дерево с легкой окраской 73%
Пробковое дерево 65%
Белый пластик 70%
Черный пластик 22%
Черный неопрен 20%
Автомобильные покрышки 15%
Матовый алюминий 120%
Нержавеющая сталь, полированная 230%
Особого рассмотрения при выборе такого датчика
требует вопрос цвета целевого объекта. Очевидно, что лучше воспринимаются
светлые объекты на темном фоне, поскольку они отражают больше света. Для работы
с темными объектами датчики имеют специальный регулировочный потенциометр
(Рисунок 15)
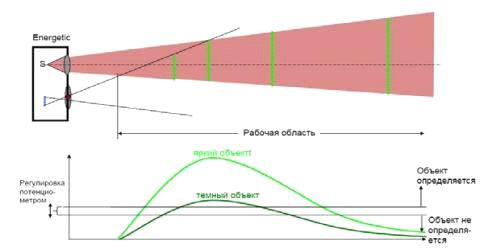
Рисунок 15 - Регулировочный потенциометр
Диффузионные датчики позволяют измерять различные участки области прохождения луча: быть нечувствительными к близко расположенным объектам (подавление переднего фона), к объектам за пределами определенной зоны (подавление заднего фона) или одновременно к близко и далеко расположенным предметам (energetic). Подавление заднего фона используется для детектирования объектов до определенного расстояния. Все объекты, находящиеся за границами этой области, датчиком игнорируются. Регулировка рабочего расстояния здесь не связана с чувствительностью приемника, а достигается оптической триангуляцией. Такие датчики имеют в конструкции датчик положения (PSD - position sensor detector). Отраженный луч попадает на датчик под различным углом.
Чем больше расстояние до объекта, тем острее
угол отражения. Благодаря такому методу измерения угла отражения датчики могут
детектировать все объекты на заданном расстоянии вне зависимости от их цвета.
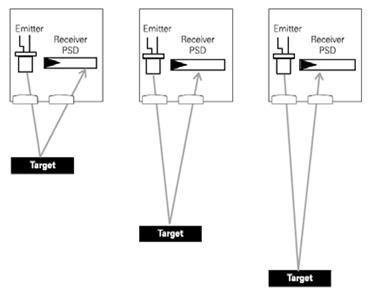

Рисунок 17 - Диффузионный датчик
Также, диффузионные датчики могут иметь подавление переднего фона или иметь регулируемое расстояние работы, т.н. energetic, а также работать с блестящими предметами.
Датчики с подавлением переднего и заднего фона (energetic) позволяют пользователю точно установить минимальное и максимальное расстояние детектирования. Таким образом, датчик срабатывает только на целевые объекты, появляющиеся в заданной зоне. Например, типичной сферой применения таких датчиков являются промышленные конвейеры, где рабочая область датчика соответствует ширине конвейерной ленты. Нечувствительность датчиков к отражающим и рифленым поверхностям гарантирует отсутствие ошибочных срабатываний(3).
.
Описание принципа действия ПИП в
статическом и в динамическом режимах
Может потребоваться несколько этапов преобразований, прежде чем входной сигнал, поступающий на датчик, превратится в выходной электрический сигнал. Рассмотрим общие характеристики датчиков, вне зависимости от их физической природы и количества необходимых промежуточных этапов преобразований. При этом датчики будут представлены в виде «черных ящиков», где важными будут только соотношения между сигналами на их входах и выходах.
Датчик должен воспроизводить физическую величину максимально быстро и точно. Хотя чаще всего датчик выбирают исходя из надежности и удобства обслуживания, его точность, стабильность и повторяемость результатов остаются важнейшими факторами. Основой работы управляющего компьютера является входная информация, поэтому точные и надежные измерения - это необходимое условие качества управления. Большая часть характеристик датчика, которые приводятся в техническом описаний, - статические параметры. Эти параметры не показывают, насколько быстро и точно датчик может измерить сигнал, изменяющийся с большой скоростью. Свойства, отражающие работу датчика в условиях изменяющихся входных воздействий, называются динамическими характеристиками.
Динамические свойства датчика характеризуются
целым рядом параметров, которые, однако, довольно редко приводятся в
технических описаниях производителей. Динамическую характеристику датчика можно
экспериментально получить как реакцию на скачок измеряемой входной величины.

tпр - время прерывания светового потока
Рисунок 18 - Динамическая характеристика
В принципе следует стремиться к минимизации следующих параметров:
) Время прохождения зоны нечувствительности
) Запаздывание
) Время нарастания
) Время достижения первого максимума
) Время переходного процесса, время установления
) Относительное перерегулирование
) Статическая ошибка
В реальных условиях некоторые требования к датчикам всегда противоречат друг другу поэтому все параметры нельзя минимизировать одновременно.
Статические характеристики датчика показывают, насколько корректно выход датчика отражает измеряемую величину спустя некоторое время после ее изменения, когда выходной сигнал установился на новое значение. Важными статическими параметрами являются: чувствительность, разрешающая способность или разрешение, линейность, дрейф нуля и полный дрейф, рабочий диапазон, повторяемость и воспроизводимость результата.
Чувствительность датчика определяется как отношение величины выходного сигнала к единичной входной величине.
Разрешение (resolution) - это наименьшее изменение измеряемой величины, которое может быть зафиксировано и точно показано датчиком.
Линейность (linearity) не описывается аналитически, а определяется исходя из градуировочной кривой датчика.
Статическое усиление (staticgain)- это коэффициент усиления датчика на очень низких частотах.
Дрейф (drift) определяется как отклонение показаний датчика, когда измеряемая величина остается постоянной в течение длительного времени. Величина дрейфа может определяться при нулевом, максимальном или некотором промежуточном значении входного сигнала.
3. Описание
функциональной схемы ПИП, в том числе схемы преобразования измеряемой величины
в электрический сигнал
Сущность внутреннего фотоэффекта, используемого в работе полупроводниковых приемников оптического излучения, состоит в образовании в полупроводнике свободных носителей заряда (электронов проводимости и свободных дырок) при поглощении ими электромагнитного излучения. В соответствии с зонной теорией этот эффект объясняется тем, что при поглощении энергии электромагнитного излучения электроны атомов полупроводника совершают переходы на более высокие энергетические уровни - из валентной зоны в зону проводимости. При наличии в полупроводнике специально введенных примесей (такие полупроводники называют примесными) электроны могут совершать переходы с примесного уровня в зону проводимости или из валентной зоны на примесный уровень.
При внутреннем фотоэффекте (в отличие от
внешнего фотоэффекта) электроны остаются внутри полупроводника. Возникновение
в
полупроводнике при его излучении свободных зарядов сопровождается изменением
его электропроводности (эффект фотопроводимости и фоторезистивный эффект) и,
при определенных условиях, появлением разности
потенциалов, т. е. фото-ЭДС (фотогальванический эффект).

Рисунок 19 - Функциональная схема
В качестве фотоэлектрического приемника
используется фотодиод. Фотодиоды - полупроводниковые приемники оптических излучений,
действие которых основано на внутреннем фотоэффекте, в которых использована
односторонняя проводимость р-n-перехода,
приводящая при поглощении оптического излучения к появлению фото-ЭДС
(фотогальванический режим) или при наличии питания - к изменению значения
обратного тока (фотодиодный режим).