Материал: Асимптотическая логарифмическая амплитудно-частотная характеристика разомкнутой системы
9. Метод прямого программирования


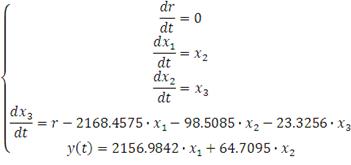
Матрица коэффициентов: Матрица выхода:

10. Параметрическая оптимизация системы
ПИД-регулятор, настроенный по критерию минимум интеграла от
взвешенного модуля ошибки (ИВМО)
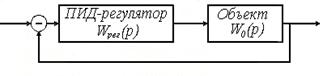
Рис. 7. Система с ПИД-регулятором
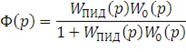
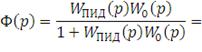
Передаточная функция замкнутой системы с ПИД-регулятором


Для упрощения расчетов, уберем звено в числителе ![]()
![]()


Используя таблицу оптимальных значений коэффициентов
характеристического полинома замкнутой системы, рассчитать искомые значения
коэффициентов ПИД-регулятора
![]()
![]()
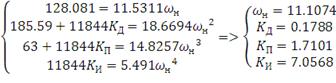
![]()
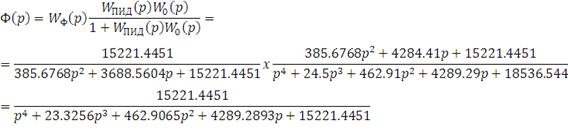
Определим передаточную функцию замкнутого контура



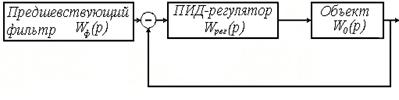
Рис.8. Структура системы с предшествующим фильтром
Определяем передаточную функцию предшествующего фильтра, так,
чтобы передаточная функциия замкнутой системы не имела нулей и приняла
табличный вид:





Определяем передаточную функцию предшествующего фильтра, так,
чтобы передаточная функция замкнутой системы не имела нулей и приняла табличный
вид
![]()
Определим передаточную функцию замкнутого контура:
Регулятор, настроенный по критерию симметричного оптимум (СО) и/или модального оптимума (МО)
![]()
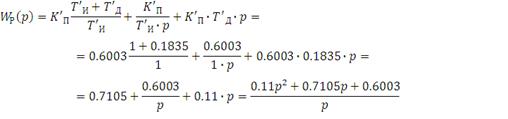
Передаточная функция ПИД-регулятора имеет вид:
Преобразуем формулу ПИД-регулятора:

Он сочетает в себе преимущества более простых законов.
В зависимости от типа и порядка объектов, а также соотношений
между их постоянными времени, настройка контура регулирования осуществляется
либо по критерию МО (модульный оптимум), либо по критерию СО (симметричный
оптимум) (в этом случае передаточной функции соответствует симметричная ЛАЧХ L
(ω), поэтому изложенный подход к выбору
настроек получил название симметричногооптимума. Настроечные параметры
регуляторов![]()
![]() ,
, ![]()
![]() и
и![]()
![]() , обеспечивающие получение определенных показателей качества, в
дальнейшем будем называть гарантирующими.
, обеспечивающие получение определенных показателей качества, в
дальнейшем будем называть гарантирующими.
Таблица 1. Гарантирующие параметры регулятора
Передаточная функция объекта KP’
TИ’
TД’
Т03≥ 4Т01
Т02≥ 4Т01MO
COТ03 /2k0Т01
Т03 /2k0Т01
Т02Т03 /8k0Т012Т03
4Т01
Т02Т02
Т02
4Т01
Исходя из условий передаточной функции
1. . Выбираем коэффициенты Запишем передаточную функцию ПИД-регулятора:
Определим передаточную функцию замкнутого контура
Установившаяся ошибка. ПИД-регулятор, настроенный по критерию
минимум интеграла от взвешенного модуля ошибки (ИВМО)
Регулятор, настроенный по критерию СО
Таблица 2. Сравнительная таблица
Показатели качества
tпп, с
σ,%
e (∞), %
Исходная система
0.5291
Регулятор по критерию ИВМО
0
Регулятор ИВМО с предшествующим фильтром Регулятор СО
0
После введения регуляторов исчезает ошибка в установившемся
режиме.
1. Руководство для курсового проектирования по ТАУ для ЭС,
КТЭИ, МЭ.
. Теория автоматического управления. Учебное пособие / В.П.
Казанцев. - Пермь: ПГТУ, 2014. - 124 c., илл.
![]() Условия
примененияКритерийПараметры регулятора
Условия
примененияКритерийПараметры регулятора
![]()
![]() Т03≤ 4Т01
Т03≤ 4Т01
![]()
![]()
![]()
![]()
![]() (3 строка таблицы)
(3 строка таблицы)
![]()
![]() ,
, ![]()
![]() и
и![]()
![]() :
:

![]()
![]() (постоянная времени интегрирования);
(постоянная времени интегрирования);
![]()
![]() (постоянная времени дифференцирования).
(постоянная времени дифференцирования).





![]()


![]()
.
Сравнительная таблица
Список
использованных источников