Материал: Анализ линейной системы автоматического управления
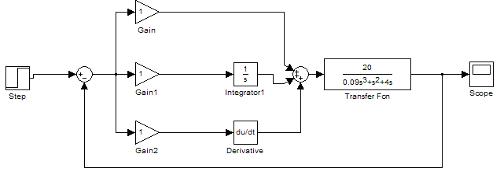
Рисунок 11-САР с ПИД-регулятором
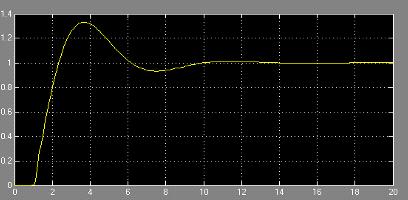
Рисунок 12- Система в которой все составляющие ПИД-регулятора равны 1
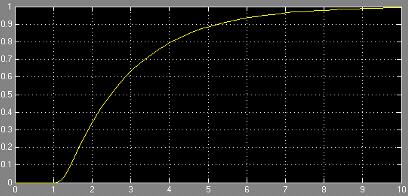
Рисунок 13- Система в которой пропорциональная составляющая равна 0,1
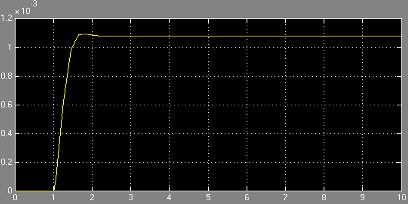
Рисунок 13- Система в которой дифференциальная составляющая равна 0,01
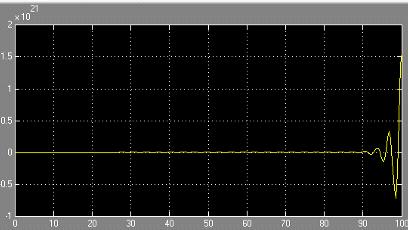
Рисунок 14- Система в которой интегрирующая составляющая равна 1
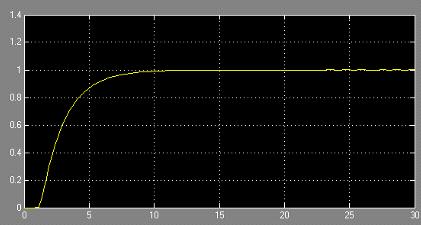
Рисунок 15- Система с собранным ПИД-регуляторм, в котором пропорциональная составляющая равна 0,1, интегральная равна 0, дифференциальная 0,01
8. Анализ устойчивости системы с ПИД-регулятором
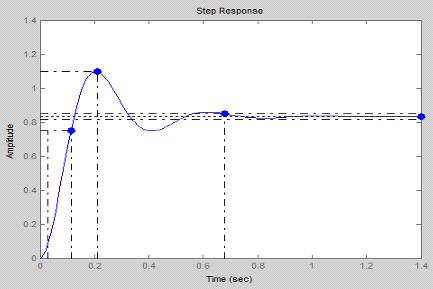
Для системы с ПИД-регулятором построить переходной процесс и логарифмические частотные характеристики.
Переходной процесс:
Рисунок
16 -переходный процесс системы с ПИД-регулятором
Время возрастания функции: 0.08 с.
Время регулирования: 0.67 с.
Время стабилизации: 0.8 с.
Логарифмические
частотные характеристики:
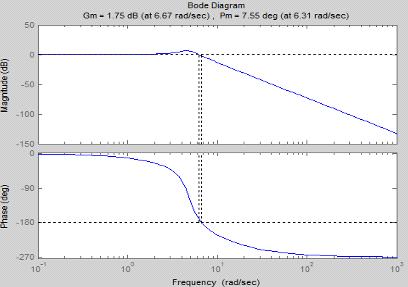
Запас устойчивости по амплитуде: 6.67 Рад/с.
Запас
устойчивости по фазе: 7.55
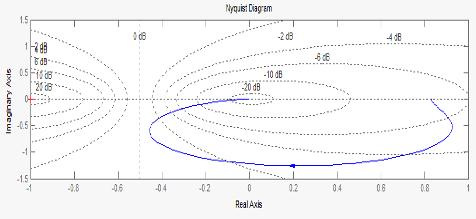
Амплитудно - фазовая частотная характеристика:
Заключение
После введения в систему ПИД-регулятора с оптимальными настройками, время
возрастания функции уменьшилось на 1.02 секунды, время регулирования на 1.84
секунды и поволило достичь установившегося значения за 9 секунд а не за 12.
Список литературы
1. Бесекерский В.А, Попов Е.П. - Теория систем автоматического управления 2009.
. М. М. Савин, В. С. Елсуков, О. Н. Пятина; под ред. В. И. Лачина. - Теория систем автоматического управления 2012.