Материал: Zapiska-1
 =
=
 =167,5
=167,5 155=
25962
155=
25962 кВт,
кВт,
 =
225,755
=
225,755 г/(кВтч),
г/(кВтч),
 кг/ч.
кг/ч.
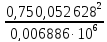
Для остальных значений ωx расчеты выполнялись аналогично, результаты расчетов сведены в таблицу 3.1. Кроме того, по полученным данным построена внешняя скоростная характеристика проектируемого 4-х цилиндрового бензинового двигателя (рисунок 3.2).
Таблица 3.1 – Результаты расчета основных параметров двигателя
|
№ п/п |
Частота вращения по графику nе, мин-1 |
Угловая скорость вращения wе, рад/с |
Значение крутящего момента, Mе, Нм
|
Эффективная мощность, Nе, кВт |
удельного эффективного расхода топлива gе, г/(кВтч) |
Часового расхода топлива, Gт, кг/ч |
|
1 |
1600 |
167,47 |
155,00 |
25,96 |
214,72 |
5,57 |
|
2 |
1800 |
188,40 |
180,00 |
33,91 |
209,95 |
7,12 |
|
3 |
2000 |
209,33 |
235,00 |
49,19 |
205,69 |
10,12 |
|
4 |
2200 |
230,27 |
248,00 |
57,11 |
201,93 |
11,53 |
|
5 |
2400 |
251,20 |
257,00 |
64,56 |
198,66 |
12,83 |
|
6 |
2600 |
272,13 |
259,00 |
70,48 |
195,91 |
13,81 |
|
7 |
2800 |
293,07 |
260,00 |
76,20 |
193,65 |
14,76 |
|
8 |
3000 |
314,00 |
265,00 |
83,21 |
191,89 |
15,97 |
|
9 |
3200 |
334,93 |
270,00 |
90,43 |
190,64 |
17,24 |
|
10 |
3400 |
355,87 |
276,00 |
98,22 |
189,89 |
18,65 |
|
11 |
3600 |
376,80 |
280,00 |
105,50 |
189,63 |
20,01 |
|
12 |
3800 |
397,73 |
282,00 |
112,16 |
189,89 |
21,30 |
|
13 |
4000 |
418,67 |
278,00 |
116,39 |
190,64 |
22,19 |
|
14 |
4200 |
439,60 |
276,00 |
121,33 |
191,89 |
23,28 |
|
15 |
4400 |
460,53 |
272,00 |
125,27 |
193,65 |
24,26 |
|
16 |
4600 |
481,47 |
270,00 |
130,00 |
195,91 |
25,47 |
|
17 |
4800 |
502,40 |
270,00 |
135,65 |
198,66 |
26,95 |
|
18 |
5000 |
523,33 |
265,00 |
138,68 |
201,93 |
28,00 |
|
19 |
5200 |
544,27 |
263,00 |
143,14 |
205,69 |
29,44 |
|
20 |
5400 |
565,20 |
261,00 |
147,52 |
209,95 |
30,97 |
|
21 |
5600 |
586,13 |
256,00 |
150,05 |
214,72 |
32,22 |
|
22 |
5800 |
607,07 |
248,00 |
150,55 |
219,99 |
33,12 |
|
23 |
6000 |
628,00 |
240,00 |
150,72 |
225,76 |
34,03 |
4.1 Приведение масс частей кривошипно-шатунного механизма
Для упрощения динамического расчета действительный КШМ заменяется эквивалентной системой сосредоточенных масс (рисунок 4.2), которая состоит из массы mJ, совершающей возвратно-поступательное движение и сосредоточенной в точке А, и массы mR, совершающей вращательное движение и сосредоточенной в точке В.
Сосредоточенные массы mJ, кг, и mR, кг, определяются по формулам:
mJ = mП + mШП; (4.3)
mR = mК + mШК, (4.4)
где mП – масса поршневой группы, кг;
mШП – часть массы шатунной группы, сосредоточенная в точке А (на оси поршневого пальца), кг; mШП = 0,275 mШ;
mШК – часть массы шатунной группы, сосредоточенная в точке В (на оси кривошипа), кг; mШК = 0,725 mШ;
mК – часть массы кривошипа, сосредоточенная в точке В.

Рисунок 4.2 – Схемы системы сосредоточенных масс, динамически эквивалентной кривошипно-шатунному механизму
Полная масса шатунной группы mШ, кг, равна:
mШ = mШП + mШК. (4.5)
Часть массы кривошипа mК, кг, определяется по формуле
mК = mШШ + 2 mЩ /r, (4.6)
где mШШ – масса шатунной шейки с прилегающими частями щек, кг;
mЩ – масса средней части щеки, заключенная в контуре abсd, центр тяжести которой расположен на расстоянии от оси вращения вала.
Для приближенного определения значений mП и mШ следует использовать конструктивные массы mi' (массы, отнесенные к площади поршня), значения которых представлены в [1, таблица 4.1], то есть по формулам:
mП = mП' FП = 100 0,00689 ≈ 0,689 кг; (4,7)
mШ = mШ' FП = 150 0,00689 ≈ 1,034 кг. (4.8)
По формуле (4.3) получаем:
mJ = 0,689 + 0,275 1,034 ≈0,973 кг.
4.2 Расчет сил инерции
Силы инерции, действующие в КШМ, в соответствии с характером движения приведенных масс (см. рисунок 4.1) подразделяются на силы инерции поступательно движущихся масс РJ и центробежные силы инерции вращающихся масс KR.
Значение силы РJ , Н, определяется по формуле
РJ = – mJ j, (4.9)
где j – ускорение поршня, м/с2. Причем:
j
= r

(cos
+ λcos
2).
(4.10)
(cos
+ λcos
2).
(4.10)
Рисунок 3.2 – Внешняя скоростная характеристика проектируемого 4-х цилиндрового бензинового двигателя мощностью 114 кВт
4 Динамический расчет кшм с применением эвм
Динамический расчет кривошипно-шатунного механизма проектируемого двигателя заключается в определении суммарных сил и моментов, возникающих от давления газов и сил инерции, что требуется для выполнения расчетов деталей двигателя на прочность и износостойкость, расчета подшипников коленчатого вала, анализа уравновешенности двигателя.
Динамический расчет проводится для номинального режима работы двигателя. В течение каждого рабочего цикла силы, действующие в КШМ, непрерывно изменяются по величине и направлению. Поэтому расчет необходимо производить для ряда положений коленчатого вала. Для четырехтактного двигателя силы определяются через каждые 30° угла поворота коленчатого вала в диапазоне от 0° до 720°, а в области резкого изменения величин нагрузок (от 360° до 390°) – через 15°. В качестве нулевого выбирается такое положение кривошипа, при котором поршень находится в верхней мертвой точке (в.м.т.) во время такта впуска.
Силы
давления газов, действующие на площадь
поршня, для упрощения заменяются одной
силой РГ,
направленной вдоль оси цилиндра и
приложенной к оси поршневого пальца
(рисунок 4.1). Сила РГ
определяется для ряда значений угла
поворота коленчатого вала по действительной
развернутой (в координатах Р – )
индикаторной диаграмме. 
Построение развернутой диаграммы производится в следующей последовательности. На листе в координатах Р – V (Р – S) изображается полученная в тепловом расчете индикаторная диаграмма; затем правее ее наносится координатная сетка Р – , при этом ось абсцисс по горизонтали должна располагаться на уровне линии Р0 свернутой диаграммы (на развернутой диаграмме показывается не абсолютное давление РГ, а избыточное давление РГ над поршнем).
Дальнейшее перестроение индикаторной диаграммы осуществляется по методу Брикса: под свернутой диаграммой строится вспомогательная полуокружность и определяется центр Брикса [1]. Из центра О', от левой половины основания полуокружности (что соответствует выбранному нулевому положению кривошипа) под требуемыми углами откладываются вспомогательные лучи, а из центра Брикса О1 проводятся линии, параллельные этим лучам, до пересечения с полуокружностью. Из найденных точек проводятся вертикали, которые, пересекая диаграмму на участке, соответствующем требуемому такту двигателя, определяют положения поршня, соответствующие заданным углам . Значения давлений в этих точках переносятся на вертикали соответствующих углов развернутой диаграммы.
Удельная сила давления газов PГ, МПа, равна:
PГ = рГ / FП = (РГ – Р0) FП / FП = РГ, (4.1)
где РГ – давление газов в любой момент времени, МПа;
FП – площадь поршня, м2. Причем:
FП
=
 .
(4.2)
.
(4.2)
Величины РГ снимаются с развернутой индикаторной диаграммы для требуемых значений . Соответствующие им силы РГ рассчитываются по формуле (4.1). Силы давления газов, направленные к оси коленчатого вала, считаются положительными, а от него – отрицательными (на рисунке 4.1 стрелками указаны положительные и отрицательные направления).
Значение силы KR, Н, определяется по формуле
KR
= – mR
r
 .
(4.11)
.
(4.11)
Центробежная сила инерции КR является результирующей двух сил:
– силы инерции вращающихся масс шатуна КRШ, Н, равной:
КRШ
=
 =
=
 –
2,23 МПа; (4.12)
–
2,23 МПа; (4.12)
– силы инерции вращающихся масс кривошипа KRK, Н, равной:
KRK
= – mК
r
 .
(4.13)
.
(4.13)
Силы инерции возвратно-поступательно движущихся масс РJ действуют по оси цилиндра и как силы давления газов, являются положительными, если направлены к оси коленчатого вала. Центробежная сила инерции KR действует по радиусу кривошипа и направлена от оси коленчатого вала.